我造轮子,你造车,创客一起造起来!塔克创新资讯【塔克社区 www.xtark.cn 】【塔克博客 www.cnblogs.com/xtark/ 】

SONY的PS2无线手柄是索尼游戏机的遥控手柄,控制协议已被全球创客破解,可以方便用于机器人控制器,作为遥控输入设备。
这款手柄价格便宜,性价比极高,本文使用X-CTR100控制器对PS2进行解码,并显示键值,方便用户使用。
原理
PS2无线手柄按键比较多,例如在一款游戏中的设定:
PS手柄无线接收器,针脚输出端(面对插头)

-----------------------------------------
PIN 1->| o o o | o o o | o o o |
\___________________________________/
针脚 从左到右分别是 :
1-DATA:信号流向从手柄到主机。此信号是一个8 bit的串行数据,同步传送于时钟下降沿(输入输出信号在时钟信号由高 到低时变化,所有信号的读取在时钟前沿到电平变化之前完成。)
2-COMMAND :信号流向从主机到手柄。此信号和DATA相对,同样是一个8 bit的串行数据,同步传送于时钟下降沿。
3-N/C (9 Volts unused)
4-GND
5-VCC :电源电压从5V到3V原装的索尼手柄都可以工作。主机主板上装有表面安装的750mA 保险丝 ,用于防止外设过载 (750mA是包括左右手柄和记忆卡)。
6-ATT :用于提供手柄触发信号。信号在通信期间处于低电平。又有人将此针脚叫做 Select, DTR 和 Command
7-CLOCK :信号流向从主机到手柄。用于保持数据同步。
8-N/C
9-ACK :从手柄到主机的应答信号。此信号在每个8 bits数据发送之后的最后一个时钟周期变低,并且ATT 一直保低电平。如果ACK 信号不变低约60微秒PS主机会试另一个外设。
PS手柄信号,所有通讯都是8 bit串行数据最低有效位先行。在PS 手柄总线的所有时码在时钟下降沿都是同步的。传送一个字节的情况如下所示。
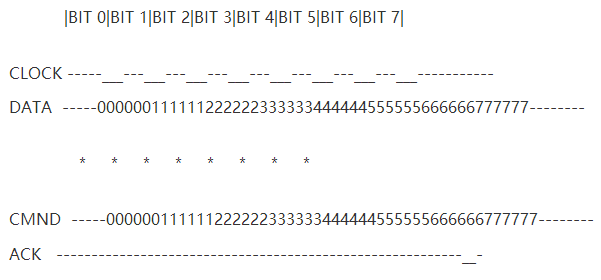
数据线的逻辑电平在时钟下降沿驱动下触发改变。数据的接收读取在时钟的前沿(在记号*处)到电平变化之前完成。 在被选手柄接收每个COMMAND 信号之后,手柄需拉低ACK 电平在最后一个时钟。如果被选手柄没ACK 应答主机将假定没手柄接入。
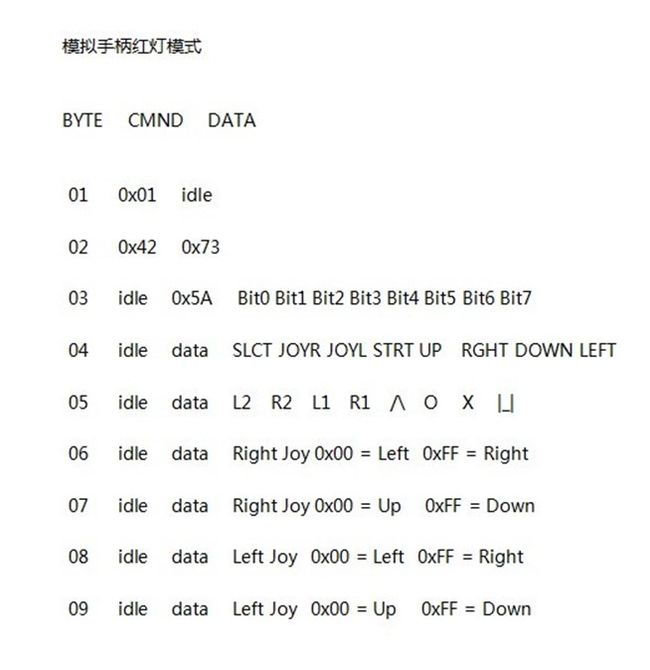
当PS主机想读一个手柄的数据时,将会拉低ATT 线电平并发出一个开始命令 (0x01)。手柄将会回复它的ID (0x41=数字, 0x23=NegCon, 0x73=模拟红灯, 0x53=模拟绿灯). 在手柄发送ID
字节的同时主机将传送0x42 请求数据。随后命令线将空闲和手柄送出 0x5A 意思说:"数据来了"。
本文只针对 "模拟手柄红灯模式"进行破解,字节定义如下。
例程
X-CTR100控制器解码PS2无线手柄,并通过串口输出显示键值。
硬件说明
硬件资源:
- 串口UART1
- LC扩展接口(非串口,作为普通IO口使用)
- PS2无线手柄(需自备)
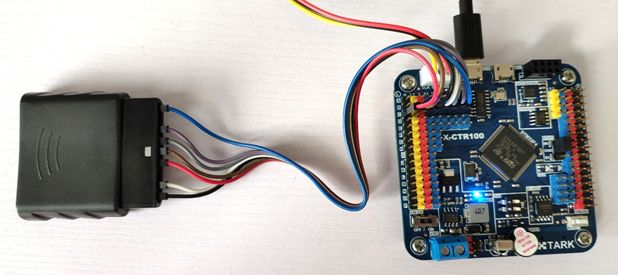
连接关系如下,
DATA——LC接口-D6
COMM——LC接口-D5
GND——LC接口-GND
VCC——LC接口-3.3V
ATT——LC接口-D7
CLOCK——LC接口-D4
ACK——LC接口-D3
连接实物图
软件生态
X-SOFT软件生态,X-API扩展文件如下。
ax_ps2.c——PS2无线手柄操作源文件
ax_ps2.h——PS2无线手柄头文件
接口函数
void AX_PS2_Init(void); //PS2初始化 void AX_PS2_ScanKey(JOYSTICK_TypeDef* JoystickStruct);//PS2获取按键及摇杆数值 |
定义PS2键值结构体JOYSTICK_TypeDef,通过结构体进行键值和摇杆数据传输。
//手柄键值数据结构体 typedef struct { uint8_t mode; /* 手柄的工作模式 */
uint8_t btn1; /* Bit0 Bit1 Bit2 Bit3 Bit4 Bit5 Bit6 Bit7 SLCT STRT UP R DOWN L */
uint8_t btn2; /* Bit0 Bit1 Bit2 Bit3 Bit4 Bit5 Bit6 Bit7 L2 R2 L1 R1 /\ O X 口 */
uint8_t RJoy_LR; /*右边摇杆 0x00 = 左 0xff = 右 */
uint8_t RJoy_UD; /*右边摇杆 0x00 = 上 0xff = 下 */
uint8_t LJoy_LR; /*右边摇杆 0x00 = 左 0xff = 右 */
uint8_t LJoy_UD; /*右边摇杆 0x00 = 上 0xff = 下 */
}JOYSTICK_TypeDef; |
软件说明
主程序通过键值扫描函数,获取按键状态,并通过串口显示,主程序代码如下。
int main(void) { //X-CTR100初始化 AX_Init(115200); printf("***X-CTR100 PS2无线手柄例程***\r\n\r\n");
//功能配置 AX_PS2_Init(); //PS2初始化
while (1) { AX_PS2_ScanKey(&my_joystick);
//打印手柄键值 printf("MODE:%2x BTN1:%2x BTN2:%2x RJOY_LR:%2x RJOY_UD:%2x LJOY_LR:%2x LJOY_UD:%2x\r\n", my_joystick.mode, my_joystick.btn1, my_joystick.btn2, my_joystick.RJoy_LR, my_joystick.RJoy_UD, my_joystick.LJoy_LR, my_joystick.LJoy_UD);
AX_Delayms(30); } } |
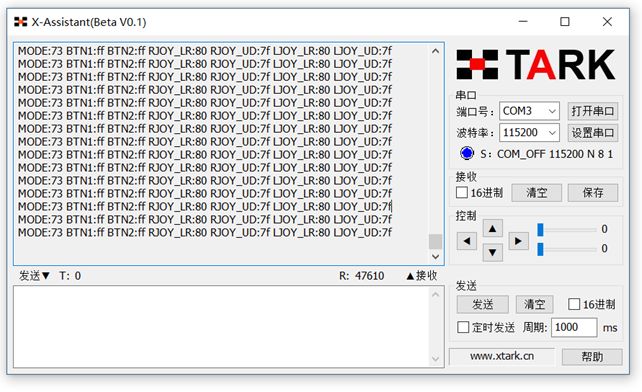
实现效果
BTN1、BTN2为按键值,后面为摇杆数据,摇杆中位为0x7F或0x80。