从零开始跑ORB_SLAM2(三) 使用Realsense D435相机跑ORB_SLAM2生成稀疏点阵
前期准备
从零开始跑ORB_SLAM2(零) 安装Ubuntu16.04 LTS
从零开始跑ORB_SLAM2(一) 前期准备与环境配置
从零开始跑ORB_SLAM2(二) 配置ROS Kinetic环境并测试Realsense D435相机
工作环境
PC:i5-8265U 8GRAM 核显 弟弟CPU
相机:Intel-Realsense D435
环境:Ubuntu16.04 LTS+ ROS Kinetic
创造ROS工作空间
国际惯例,GitHub的官方文档发一波:ROS Wrapper for Intel® RealSense™ Devices
如果懒得看英文也可以跟我一步步走。
在开始这一步之前,需要完成的事情分别是:
安装ROS Kinetic
安装Realsense SDK
毫无疑问我们已经完成了这两步,为了安装基于ROS使用RealSense的包,现在开始我们要创造一个ROS的工作空间并且配置它。
Ctrl + Alt + T 新建一个命令行:
新建一个文件夹命名为catkin_ws,在目录下新建一个文件夹src并进入:
mkdir -p ~/catkin_ws/src
cd ~/catkin_ws/src/
将catkin_ws/src设置为工作空间:
catkin_init_workspace
这个工作空间设置完了之后最神奇的地方在于,虽然里面什么也没有,但是仍然可以进行编译:
catkin_make clean
catkin_make -DCATKIN_ENABLE_TESTING=False -DCMAKE_BUILD_TYPE=Release
catkin_make install
编译完毕之后你可以在根目录下看见build等文件。
将最新的ntel® RealSense™ ROS包git到src下: 注意这一步,直接git不一定能得到最新的(虽然我也不知道为什么),我比较建议你们进入Github官网直接把包download到本地。
cd src
git clone https://github.com/IntelRealSense/realsense-ros.git
cd realsense-ros/
git checkout `git tag | sort -V | grep -P "^\d+\.\d+\.\d+" | tail -1`
cd ..
现在需要对工作空间再进行一次编译,但是一部分人会出现编译失败(也包括我…),请看一条报错:
missing: ddynamic_reconfigure_DIR
缺少了ddynamic_reconfigure这个依赖包,进入Github下的Readme中查阅到:
Make sure all dependent packages are installed. You can check .travis.yml file for reference.
Specifically, make sure that the ros package ddynamic_reconfigure is installed. If ddynamic_reconfigure cannot be installed using APT, you may clone it into your workspace ‘catkin_ws/src/’ from here (Version 0.2.0)
所以需要点击此处下载依赖包,解压后将其提取到src下,再重新编译一次:
catkin_make clean
catkin_make -DCATKIN_ENABLE_TESTING=False -DCMAKE_BUILD_TYPE=Release
catkin_make install
如无意外这次可以成功。在src下不需要放其他的东西,ORB_SLAM2的包放在catkin_ws下就行了,如下图。(我的catkin_ws写成了catkin_s,不要介意细节)

主目录下文结构:

至此,ROS工作空间的创造就完成了,如果对工作空间感兴趣可移步这里了解更多信息。
下面配置相机节点并测试。
相关配置
插上相机,Ctrl + Alt + T 新建一个命令行:
在任意目录下输入:
roslaunch realsense2_camera rs_rgbd.launch
请看一条可能的报错:
[rs_rgbd.launch] is neither a launch file in package [realsense2_camera] nor is [realsense2_camera] a launch file name
The traceback for the exception was written to the log file
这是由于你没有把devel下的bash文件添加到bashrc的缘故
为了每次启动命令行都能自动添加,则直接修改bashrc文件:
echo "source ~/catkin_ws/devel/setup.bash" >> ~/.bashrc
echo "source ~/catkin_ws/devel/setup.sh" >> ~/.bashrc
source ~/.bashrc
至此,你的bashrc文件中应该添加了以下路径:
source /opt/ros/kinetic/setup.bash
source ~/catkin_ws/devel/setup.sh
source ~/catkin_ws/devel/setup.bash
export ROS_PACKAGE_PATH=~/catkin_s:/home/(用户名)/catkin_ws/src:/opt/ros/kinetic/share
此时再启动相机节点,
roslaunch realsense2_camera rs_rgbd.launch
成功则有以下提示:


如果你忘记插上相机,则会有warning提示:
[ WARN] [1570683306.945951510]: No RealSense devices were found!
此时按Ctrl+C强制退出,插上相机再执行一次就行。
Ctrl + Alt + T 新建一个命令行:
sudo apt-get install rviz
rviz
此时并不能看见什么结果
左上角 Displays 中 Fixed Frame 选项中,下拉菜单选择 camera_link
这是主要到Global Status变成了绿色
点击该框中的Add -> 上方点击 By topic -> /depth_registered 下的 /points 下的/PointCloud2
点击该框中的Add -> 上方点击 By topic -> /color 下的 /image_raw 下的image
你也可以添加更多的信息(深度图)等,成功则有以下图片,拖动鼠标左右键可以查看生成的点云。附上笔者乱糟糟书柜一张。
 相机节点测试完毕。
相机节点测试完毕。
运行ORB_SLAM2
终于到令人兴奋的 实战环节了!其实到这一步就已经没什么坑了,按照官网的步骤基本都可以成功,但有些细节需要注意,我大概讲一讲。
首先要在工作空间内放置一个Pangolin优化库,这就是我在之前的博客中提到的Pangolin可能需要重新安装的原因,你可以把之前的先卸载了。
在任意目录下安装一些依赖:
sudo apt-get install libglew-dev
sudo apt-get install libboost-dev libboost-thread-dev libboost-filesystem-dev
sudo apt-get install libpython2.7-dev
sudo apt-get install build-essential
cd到catkin_ws/ORBSLAM2下,克隆Pangolin代码到本地仓库并编译:
git clone https://github.com/stevenlovegrove/Pangolin.git
cd Pangolin
mkdir build
cd build
cmake -DCPP11_NO_BOOST=1 ..
make -j
Ctrl + Alt + T 新建一个命令行:
克隆ORB_SLAM2代码到本地仓库:
cd catkin_ws
git clone https://github.com/raulmur/ORB_SLAM2
修改订阅topic话题:进入catkin_ws/ORB_SLAM2/Examples/ROS/ORB_SLAM2/src路径下,找到ros_rgbd.cc,找到以下语句:
message_filters::Subscriber rgb_sub(nh, "/camera/rgb/image_raw", 1);
message_filters::Subscriber depth_sub(nh, "camera/depth_registered/image_raw", 1);
将其修改为:
message_filters::Subscriber rgb_sub(nh, "/camera/color/image_raw", 1);
message_filters::Subscriber depth_sub(nh, "/camera/aligned_depth_to_color/image_raw", 1);
如下图:

老规矩,别忘了在bashrc下添加ORB_SLAM2的工作路径:
用gedit或vim打开后在里面自行添加:
export ROS_PACKAGE_PATH=${ROS_PACKAGE_PATH}:/home/(用户名)/catkin_ws/ORB_SLAM2/Examples/ROS
现在你的bashrc应该总共有了以下新的路径信息:
source /opt/ros/kinetic/setup.bash
source ~/catkin_ws/devel/setup.sh
source ~/catkin_ws/devel/setup.bash
export ROS_PACKAGE_PATH=${ROS_PACKAGE_PATH}:/home/(用户名)/catkin_ws/ORB_SLAM2/Examples/ROS
export ROS_PACKAGE_PATH=~/catkin_s:/home/(用户名)/catkin_ws/src:/opt/ros/kinetic/share
开始编译,回到catkin_ws/ORB_SLAM2下:
ls
你会发现有两个可运行脚本,一个是build.sh,一个是build_ros.sh,但是都处于不能运行状态。
赋予编译权限:
chmod +x build.sh
chmod +x build_ros.sh
现在如果运行ls命令,则发现两个文件已经高亮标注,可以运行了。
运行第一个脚本:
./build.sh
这同样是一个漫长的过程,如果你的电脑因为运行内存不足而溢出报错(原因请看我之前的博客),请在gedit或者vim中修改build.sh的最后一行代码将make -j改为make -j2或make;你也可以释放更多的虚拟内存来防止溢出。后面的build_ros.sh同理。
编译完后继续编译ros版本脚本:
./build_ros.sh
下面内容来自其他博主,我没有遇到这个错误,供参考:
在/Examples/ROS/ORB-SLAM2/CMakeLists.txt文件下修改 加-lboost_system(没加这个的时候会有关于stl的错误)
set(LIBS
${OpenCV_LIBS}
${EIGEN3_LIBS}
${Pangolin_LIBRARIES}
${PROJECT_SOURCE_DIR}/…/…/…/Thirdparty/DBoW2/lib/libDBoW2.so
${PROJECT_SOURCE_DIR}/…/…/…/Thirdparty/g2o/lib/libg2o.so
${PROJECT_SOURCE_DIR}/…/…/…/lib/libORB_SLAM2.so
-lboost_system #此处
)
编译结束后启动相机节点:
roslaunch realsense2_camera rs_rgbd.launch
Ctrl + Alt + T 新建一个命令行:
我们先用一个yaml文件试一下能不能运行
cd catkin_ws/ORB_SLAM2
rosrun ORB_SLAM2 RGBD Vocabulary/ORBvoc.txt Examples/RGB-D/TUM1.yaml
一个常见的错误:
find: 探测到文件系统循环;
`/opt/ros/kinetic/share/ORB_SLAM2/ORB_SLAM2' 是与
`/opt/ros/kinetic/share/ORB_SLAM2' 相同的文件系统循环的一部分。
[ERROR] [1570687975.286079105]:
[registerPublisher] Failed to contact master at [localhost:11311]. Retrying...
这是由于你忘了打开相机节点的缘故。
请看一条不常见的报错:
ushio@ushio-Lenovo-XiaoXin-Air-13IWL:~/catkin_s$ rosrun ORB_SLAM2 RGBD Vocabulary/ORBvoc.txt Examples/RGB-D/D435.yaml
段错误 (核心已转储)
这是因为在catkin_ws下你有两个或更多的ORB_SLAM2包的缘故,请只留下已经编译完的版本。这个错误在以后使用改进版(with_pointcloud版本)的时候可能还会再冒出来一次。
再来看一条罕见的报错:
[rospack] Error: package 'ORB_SLAM2' not found
请进入文件路径/opt/ros/kinetic/share,查找关键词ORB。
如果你的结果是:

证明因为某种操作你的工作路径对应的链接丢失了,我们用sudo ln-s指令镜像一个新的:(类似于超链接)
sudo ln -s /home/ushio/catkin_s/ORB_SLAM2/Examples/ROS/ORB_SLAM2 /opt/ros/kinetic/share/ORB_SLAM2
此时对应路径下应该如下所示:

此时再执行rosrun ORB_SLAM2 RGBD Vocabulary/ORBvoc.txt Examples/RGB-D/TUM1.yaml应该不会有问题。
rosrun ORB_SLAM2 RGBD Vocabulary/ORBvoc.txt Examples/RGB-D/TUM1.yaml
运行结果如下:

成功!
我测试的是一个小楼梯,很明显可以看出边缘存在明显的畸变,这是没有使用自己的yaml的缘故,你需要标定自己的相机,并制作自己的yaml文件,yaml中存储的是你的相机内参。标定相机步骤略过。
制作yaml文件获取内参
国际惯例贴上Intel Realsense-D435的官方说明书,有兴趣可自己琢磨。不过我还是讲一下它在说什么。
首先确保相机已经连上电脑并打开相机节点,Ctrl + Alt + T 新建一个命令行:
rostopic echo /camera/color/camera_info
此时可以看见命令行在不停地刷新一些信息,大概长这样:
---
header:
seq: 108
stamp:
secs: 1548140470
nsecs: 392033543
frame_id: "camera_color_optical_frame"
height: 480
width: 640
distortion_model: "plumb_bob"
D: [0.0, 0.0, 0.0, 0.0, 0.0]
K: [614.4114379882812, 0.0, 324.2138671875, 0.0, 614.7125244140625, 236.86329650878906, 0.0, 0.0, 1.0]
R: [1.0, 0.0, 0.0, 0.0, 1.0, 0.0, 0.0, 0.0, 1.0]
P: [614.4114379882812, 0.0, 324.2138671875, 0.0, 0.0, 614.7125244140625, 236.86329650878906, 0.0, 0.0, 0.0, 1.0, 0.0]
binning_x: 0
binning_y: 0
roi:
x_offset: 0
y_offset: 0
height: 0
width: 0
do_rectify: False
你应该还记得在运行rosrun ORB_SLAM2 RGBD Vocabulary/ORBvoc.txt Examples/RGB-D/TUM1.yaml指令的时候,命令行界面显示的是:
ORB-SLAM2 Copyright (C) 2014-2016 Raul Mur-Artal, University of Zaragoza.
This program comes with ABSOLUTELY NO WARRANTY;
This is free software, and you are welcome to redistribute it
under certain conditions. See LICENSE.txt.
Input sensor was set to: RGB-D
Loading ORB Vocabulary. This could take a while...
Vocabulary loaded!
Camera Parameters:
- fx: 613.42
- fy: 613.439
- cx: 327.191
- cy: 244.335
- k1: 0
- k2: 0
- k3: 1.04
- p1: 0
- p2: 0
- fps: 30
- color order: RGB (ignored if grayscale)
ORB Extractor Parameters:
- Number of Features: 1000
- Scale Levels: 8
- Scale Factor: 1.2
- Initial Fast Threshold: 20
- Minimum Fast Threshold: 7
Depth Threshold (Close/Far Points): 2.5
New map created with 546 points
我们关注这一行代码:
K: [614.4114379882812, 0.0, 324.2138671875, 0.0, 614.7125244140625, 236.86329650878906, 0.0, 0.0, 1.0]
K就是相机的内参矩阵写成行向量后的结果,四个非零数值依次对应运行rosrun ORB_SLAM2 RGBD Vocabulary/ORBvoc.txt Examples/RGB-D/TUM1.yaml指令后的这四行数值:
- fx: 613.42
- fy: 613.439
- cx: 327.191
- cy: 244.335
此时我们可以新建一个yaml后缀文件,以yaml1为模板修改这四个数值。
打开yaml1,另一个需要关心的数值如下:
# IR projector baseline times fx (aprox.)
Camera.bf: 30.720571899
翻阅到官方说明书第33页:

我们想要的信息已经出现了,但是要确认一下。翻阅到51页:

D435的Baseline基线长度为50毫米。Camera.bf = ybaseline (in meters) * fx。
根据此条公式计算出D435的bf值,写入你的yaml中。
最后文件可命名为D435.yaml
我还是贴上我的yaml,但是与你们的可能存在不同:
%YAML:D435-1.0
#--------------------------------------------------------------------------------------------
# Camera Parameters. Adjust them!
#--------------------------------------------------------------------------------------------
# Camera calibration and distortion parameters (OpenCV)
Camera.fx: 613.420166015625
Camera.fy: 613.4390258789062
Camera.cx: 327.191462728515625
Camera.cy: 244.33473205566406
Camera.k1: 0.0
Camera.k2: 0.0
Camera.p1: 0.0
Camera.p2: 0.0
Camera.k3: 1.04
Camera.width: 640
Camera.height: 480
# Camera frames per second
Camera.fps: 30.0
# IR projector baseline times fx (aprox.)
Camera.bf: 30.6710083
# Color order of the images (0: BGR, 1: RGB. It is ignored if images are grayscale)
Camera.RGB: 1
# Close/Far threshold. Baseline times.
ThDepth: 50.0
# Deptmap values factor
DepthMapFactor: 1000.0
#--------------------------------------------------------------------------------------------
# ORB Parameters
#--------------------------------------------------------------------------------------------
# ORB Extractor: Number of features per image
ORBextractor.nFeatures: 1000
# ORB Extractor: Scale factor between levels in the scale pyramid
ORBextractor.scaleFactor: 1.2
# ORB Extractor: Number of levels in the scale pyramid
ORBextractor.nLevels: 8
# ORB Extractor: Fast threshold
# Image is divided in a grid. At each cell FAST are extracted imposing a minimum response.
# Firstly we impose iniThFAST. If no corners are detected we impose a lower value minThFAST
# You can lower these values if your images have low contrast
ORBextractor.iniThFAST: 20
ORBextractor.minThFAST: 7
#--------------------------------------------------------------------------------------------
# Viewer Parameters
#--------------------------------------------------------------------------------------------
Viewer.KeyFrameSize: 0.05
Viewer.KeyFrameLineWidth: 1
Viewer.GraphLineWidth: 0.9
Viewer.PointSize:2
Viewer.CameraSize: 0.08
Viewer.CameraLineWidth: 3
Viewer.ViewpointX: 0
Viewer.ViewpointY: -0.7
Viewer.ViewpointZ: -1.8
Viewer.ViewpointF: 500
一切都完成后,确保相机插入、重新启动相机节点并在ORB_SLAM2下运行:
rosrun ORB_SLAM2 RGBD Vocabulary/ORBvoc.txt Examples/RGB-D/D435.yaml
现在可以开始SLAM建图了!
一些运行的结果
楼梯特征点匹配,对于边缘对比度高的地方,还是很容易匹配的。

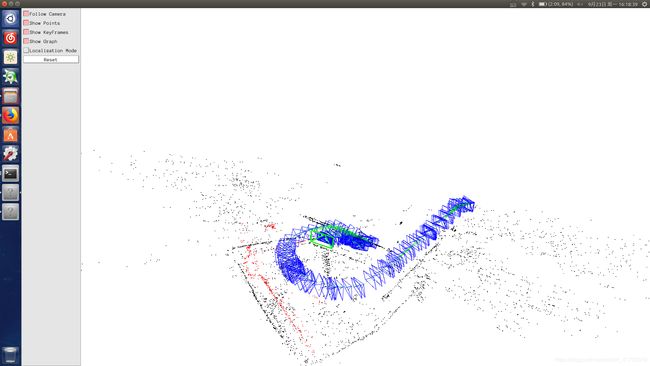
建了一个两层楼的地图,基本没有回环,下面测试。

这是测试了三层楼+两个很长的走廊的结果,可以看见上方红色的地方已回环。
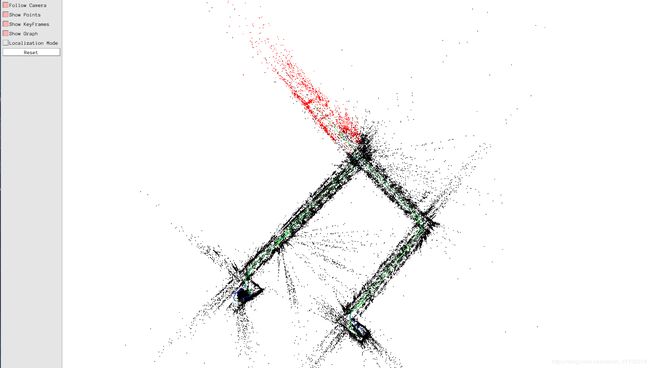
ORB_SLAM2的回环速度和精度都蛮好的,我走到同一条路后大概两秒它就检测出回环了。下图是回环成功和正在运行全局Bundle Adjustment的提示。

可以很勉强看出来这里有一个楼梯,毕竟是稀疏点阵,没法做稠密的。

地图全貌,虽然压根看不出是个地图。。。
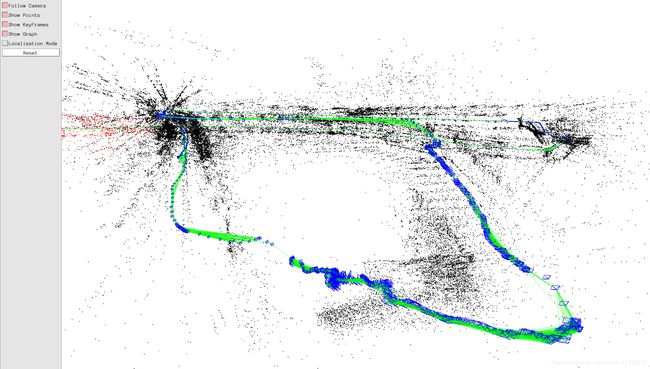
至此使用Realsense D435相机跑ORB_SLAM2生成稀疏点阵就结束了。
待解决的问题
笔者在做的项目暂时在别的模块出现了问题,所以这个SLAM就中止了,只做到这一步。暂时的问题是:
- 生成点云地图,并保存稀疏点阵和稠密点云的地图
- 如何在保存地图后计算房间的中心点
- 有没有更好的开源方案可以实施?比如港科大的VINS-Mono
以后再来填坑!