Python与Ansys apdl有限元系列二:矩阵位移法计算桁架结构
矩阵位移法计算三种桁架(静定,一次,二次超静定)
1
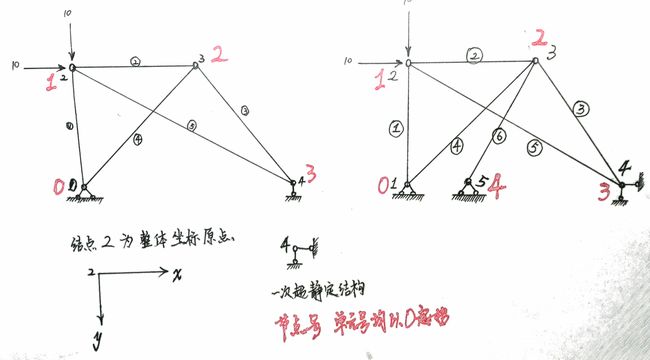
为 了 便 于 计 算 , 桁 架 弹 性 模 量 与 截 面 积 乘 积 E A = 1 , 所 有 杆 件 均 为 二 力 杆 \qquad为了便于计算,桁架弹性模量与截面积乘积EA=1,所有杆件均为二力杆 为了便于计算,桁架弹性模量与截面积乘积EA=1,所有杆件均为二力杆
只 讨 论 轴 向 变 形 。 三 结 构 均 在 左 上 节 点 受 一 水 平 向 右 , 和 竖 直 向 下 集 中 力 , 均 为 10 K N 只讨论轴向变形。三结构均在左上节点受一水平向右,和竖直向下集中力,均为10KN 只讨论轴向变形。三结构均在左上节点受一水平向右,和竖直向下集中力,均为10KN
################################
# Author: GuaDiKaoLa
# Email: [email protected]
################################
import numpy as np
from math import sqrt,sin,cos,acos
np.set_printoptions(precision=2)
np.set_printoptions(suppress=True)
EA = 1
| 静定结构 |
单 元 正 向 逆 时 针 旋 转 到 整 体 坐 标 系 X 轴 正 向 , 旋 转 角 不 得 大 于 π , 倒 数 第 二 个 必 须 是 [ 2 , 0 ] , 不 能 是 [ 0 , 2 ] 倒 数 第 一 个 必 须 是 [ 1 , 3 ] , 不 能 是 [ 3 , 1 ] 否 则 直 接 影 响 节 点 位 移 计 算 结 果 ! 单元正向逆时针旋转到整体坐标系X轴正向,旋转角不得大于\pi,\\ 倒数第二个必须是[2,0],不能是[0,2]\\ 倒数第一个必须是[1,3],不能是[3,1]\\ 否则直接影响节点位移计算结果! 单元正向逆时针旋转到整体坐标系X轴正向,旋转角不得大于π,倒数第二个必须是[2,0],不能是[0,2]倒数第一个必须是[1,3],不能是[3,1]否则直接影响节点位移计算结果!
nodeCoord = np.array([[0,-2],[0,0],[2,0],[3.5,-2]])#节点坐标
# 单元节点编号的顺序很重要,决定了单元方向
elemNode = np.array([[1,0],[1,2],[2,3],[2,0],[1,3]])#组成单元的俩节点编号
整 体 坐 标 系 下 单 元 刚 度 矩 阵 的 定 位 向 量 ( 单 刚 中 的 行 列 非 0 元 素 在 总 刚 中 的 位 置 ) 定 位 向 量 在 单 刚 组 装 成 总 刚 的 时 候 很 重 要 每 一 行 存 储 了 每 个 单 元 的 俩 端 节 点 约 束 信 息 分 别 为 u 1 , v 1 , u 2 , v 2 四 个 自 由 度 约 束 与 否 的 布 尔 值 定 位 向 量 非 0 元 素 为 结 构 中 尚 未 约 束 的 自 由 度 编 号 定 位 向 量 中 的 最 大 值 , 为 节 点 所 有 未 约 束 自 由 度 的 数 目 四 个 自 由 度 , 非 0 指 定 放 松 约 束 , 标 号 在 整 体 结 构 中 顺 次 递 增 整体坐标系下单元刚度矩阵的定位向量 (单刚中的行列非0元素 在总刚中的 位置)\\ 定位向量 在 单刚组装成总刚的时候很重要\\ 每一行存储了每个单元的俩端节点约束信息\\ 分别为u_1,v_1,u_2,v_2四个自由度约束与否的布尔值\\ 定位向量非0元素为 结构中尚未约束的自由度编号\\ 定位向量中的最大值,为节点所有未约束自由度的数目\\ 四个自由度,非0指定放松约束,标号在整体结构中顺次递增 整体坐标系下单元刚度矩阵的定位向量(单刚中的行列非0元素在总刚中的位置)定位向量在单刚组装成总刚的时候很重要每一行存储了每个单元的俩端节点约束信息分别为u1,v1,u2,v2四个自由度约束与否的布尔值定位向量非0元素为结构中尚未约束的自由度编号定位向量中的最大值,为节点所有未约束自由度的数目四个自由度,非0指定放松约束,标号在整体结构中顺次递增
lambda_k =np.array([[0,0,1,2],
[1,2,3,4],
[3,4,5,0],
[0,0,3,4],
[1,2,5,0]])
# 施加载荷
Forces = np.array([10,10,0,0,0])
上 面 的 定 位 矩 阵 第 四 行 [ 0 , 0 , 3 , 4 ] 改 成 了 [ 3 , 4 , 0 , 0 ] , 虽 然 位 移 计 算 结 果 依 然 正 确 但 是 [ 0 , 0 , 3 , 4 ] 对 应 的 杆 单 元 的 轴 力 变 成 了 正 解 相 反 数 上面的定位矩阵第四行[0,0,3,4]改成了[3,4,0,0],\\ 虽然位移计算结果依然正确\\ 但是[0,0,3,4]对应的杆单元 的轴力变成了正解相反数 上面的定位矩阵第四行[0,0,3,4]改成了[3,4,0,0],虽然位移计算结果依然正确但是[0,0,3,4]对应的杆单元的轴力变成了正解相反数
注 意 : 1 ) 单 元 正 向 逆 时 针 旋 转 到 整 体 坐 标 系 X 轴 正 向 , 旋 转 角 不 得 大 于 π , 这 必 须 满 足 2 ) 当 单 元 正 向 与 整 体 坐 标 系 X 轴 正 向 的 夹 角 小 于 90 ° 时 , 定 位 向 量 编 号 次 序 与 e l e m N o d e 单 元 节 点 次 序 一 致 , 3 ) 当 单 元 正 向 与 整 体 坐 标 系 X 轴 正 向 的 夹 角 大 于 90 ° 时 , 定 位 向 量 编 号 次 序 与 e l e m N o d e 单 元 节 点 次 序 相 反 , 所 以 l a m b d a _ k 第 四 行 单 元 节 点 次 序 为 [ 2 , 0 ] , 但 是 其 单 元 正 向 与 整 体 坐 标 系 X 轴 正 向 的 夹 角 大 于 90 ° , 故 其 定 位 向 量 编 号 次 序 为 [ 0 , 0 , 3 , 4 ] , 与 [ 2 , 0 ] 对 应 的 [ 3 , 4 , 0 , 0 ] 相 反 。 注意:1)单元正向逆时针旋转到整体坐标系X轴正向,旋转角不得大于\pi,这必须满足\\ \qquad\quad2)当单元正向与整体坐标系X轴正向的夹角小于90°时,\\ \qquad\quad定位向量编号次序与elemNode单元节点次序一致,\\ \qquad\quad3)当单元正向与整体坐标系X轴正向的夹角大于90°时,\\ \qquad\quad定位向量编号次序与elemNode单元节点次序相反,\\ 所以lambda\_k第四行单元节点次序为[2,0],\\ 但是其单元正向与整体坐标系X轴正向的夹角大于90°,\\ 故其定位向量编号次序为[0,0,3,4],与[2,0]对应的[3,4,0,0]相反。 注意:1)单元正向逆时针旋转到整体坐标系X轴正向,旋转角不得大于π,这必须满足2)当单元正向与整体坐标系X轴正向的夹角小于90°时,定位向量编号次序与elemNode单元节点次序一致,3)当单元正向与整体坐标系X轴正向的夹角大于90°时,定位向量编号次序与elemNode单元节点次序相反,所以lambda_k第四行单元节点次序为[2,0],但是其单元正向与整体坐标系X轴正向的夹角大于90°,故其定位向量编号次序为[0,0,3,4],与[2,0]对应的[3,4,0,0]相反。
| 一次超静定结构 |
nodeCoord = np.array([[0,-2],[0,0],[2,0],[3.5,-2]])#节点坐标
#
# 单元节点编号的顺序很重要,决定了单元方向
elemNode = np.array([[1,0],[1,2],[2,3],[2,0],[1,3]])#组成单元的俩节点编号
lambda_k =np.array([[0,0,1,2],
[1,2,3,4],
[3,4,0,0],
[0,0,3,4],
[1,2,0,0]])
# 施加载荷
Forces = np.array([10,10,0,0])
| 二次超静定结构 |
nodeCoord = np.array([[0,-2],[0,0],[2,0],[3.5,-2],[1,-2]])#节点坐标
#
# 单元节点编号的顺序很重要,决定了单元方向
elemNode = np.array([[1,0],[1,2],[2,3],[2,0],[1,3],[2,4]])#组成单元的俩节点编号
lambda_k =np.array([[0,0,1,2],
[1,2,3,4],
[3,4,0,0],
[0,0,3,4],
[1,2,0,0],
[0,0,3,4]])
#施加载荷
Forces = np.array([10,10,0,0])
| 计算单刚,总刚 |
nodeX = nodeCoord[:,0]#节点x坐标
nodeY = nodeCoord[:,1]#节点y坐标
# 局部坐标系下单元刚度矩阵k_e 与 桁架单元长度L 的乘积(因L为变值,故先计算恒定的乘积)
k_eL = EA*np.array([
[1,0,-1,0],
[0,0,0,0],
[-1,0,1,0],
[0,0,0,0]
])
def TransMatrix(angle):#坐标转换矩阵T
return np.array([
[ cos(angle), sin(angle) , 0 , 0 ],
[-sin(angle), cos(angle), 0 , 0 ],
[ 0 , 0 , cos(angle), sin(angle)],
[ 0 , 0 ,-sin(angle), cos(angle)]
])
def K_e(i):# 整体坐标系下单元刚度矩阵,i为单元编号
nodeIndex = elemNode[i,:]# 第i个单元的节点编号列表
node_X1_loc = nodeX[nodeIndex[0]]
node_Y1_loc = nodeY[nodeIndex[0]]
node_X2_loc = nodeX[nodeIndex[1]]
node_Y2_loc = nodeY[nodeIndex[1]]
L = sqrt((node_X2_loc - node_X1_loc) ** 2 + (node_Y2_loc - node_Y1_loc) ** 2)
angle = acos((node_X2_loc-node_X1_loc)/L)
k_e = k_eL / L# 局部坐标系下单元刚度矩阵k_e
# 整体坐标系下单元刚度矩阵 K_e = [T]' * k_e * [T]
return np.matmul(np.matmul((TransMatrix(angle).T) , k_e),TransMatrix(angle))
for i in range(len(elemNode)):
print('')
print('K_e(%d) = '%i ,'\n', K_e(i))
# 结构整体刚度矩阵 KK,单刚K_e ==组装==>> 总刚KK
# 总自由度 = 节点的个数 * 2
numberOfDof = 2 * len(nodeCoord)
# 总刚的大小为 n*n
# 其中n为结构整体节点的所有未约束的自由度数目
# 也即: 定位向量中元素的最大值
numberOfNodeFreeDof = np.max(lambda_k)
KK = np.zeros((numberOfNodeFreeDof,numberOfNodeFreeDof))
##############################################单刚K_e ==组装==>> 总刚KK
# 将单刚矩阵对应的定位向量 置于单刚的行首列首
# 将单刚矩阵中 定位向量元素为0的所在行列全部划掉
# 剩下的元素 依次添加到总刚中,在总刚中的位置就是定位向量
#
for i in range(len(elemNode)):
for j in lambda_k[i,:]:
if j != 0:
loc_kej = np.argwhere(lambda_k[i, :] == j)
for k in lambda_k[i,:]:
if k != 0:
loc_kek = np.argwhere(lambda_k[i, :] == k)
KK[j-1,k-1] += K_e(i)[loc_kej,loc_kek]
print('='*20)
print('KK = ','\n',KK)
#############################单刚K_e ==组装==>> 总刚KK
| 计算非约束自由度位移值 |
# 求解位移
displacement = np.linalg.inv(KK).dot(Forces)
print('\n','displacement:','\n',displacement)
| 计算所有单元节点位移向量 |
# 求解矩阵a_e,各个单元的结点位移向量合并而成
# 目标为 将单元定位向量矩阵的非0自由度编号替换为对应的节点位移
a_e = np.zeros((lambda_k.shape),dtype=float)
a_e += lambda_k
print(a_e)
# 上面的a_e为各个单元的结点位移矩阵合并而成,
# 节点位移矩阵使用 单元定位向量矩阵为原本,将非0的自由度编号替换为对应的节点位移即可
# 1,单元定位向量非0元素的索引为NoZeroIndex
# 2,a_e每一行根据非0元素索引 拿到非0元素
# 3,这些非0元素减一 又是 活动节点位移向量displacement 的索引
# 目标为 将单元定位向量矩阵的非0自由度编号替换为对应的节点位移
# 结点位移==>> displacement索引
# ==>> a_e非0元素值减一
# ==>> a_e非0元素值索引
# ==>> np.argwhere(a_e[i, :] != 0)
#
for i in range(len(elemNode)):
# 整体坐标系下单元杆端位移
NoZeroIndex_raw = np.argwhere(lambda_k[i, :] != 0)
NoZeroNum = NoZeroIndex_raw.shape[0] * NoZeroIndex_raw.shape[1]
# 因为NoZeroIndex_raw是一个多行一列的数组,但是必须将其展平为一行多列
# 才能使用其元素作为索引寻址,故拿到它的元素个数后使用reshape展平
NoZeroIndex = NoZeroIndex_raw.reshape(1, NoZeroNum)
for j in range(NoZeroNum):
indexDof = int(a_e[i,:][NoZeroIndex[0,j]])-1
a_e[i, :][NoZeroIndex[0, j]] = displacement[indexDof]
print(a_e[i,:].shape)#(4,)
print(a_e)
| 计算杆端轴力 |
for i in range(len(elemNode)):
AxialForceXY[i, :] = np.matmul(K_e(i), a_e[i, :])
print('AxialForceXY','\n',AxialForceXY)
2
2.1 apdl命令流
finish
/clear
/prep7
k,1,0,-2,0
k,2,0,0,0
k,3,2,0,0
k,4,3.5,-2,0
k,5,1,-2,0
l,1,2
l,2,3
l,3,4
l,1,3
l,2,4
l,3,5!二次超静定这行保留,
ET,1,LINK1
R,1,4532
MP,EX,1,1/4532
MP,PRXY,1,0.3
LATT,1,1,1
LESIZE,ALL,,,1
LMESH,ALL
DK,1,UX,,,,UY
DK,4,UX,,,,UY
!DK,4,UY
DK,5,UX,,,,UY!约束可自行设置
FORCES = 10
FK,2,FX,FORCES
FK,2,FY,-FORCES
/SOLU
ANTYPE,0
SOLVE
FINISH
| 对比分析 |
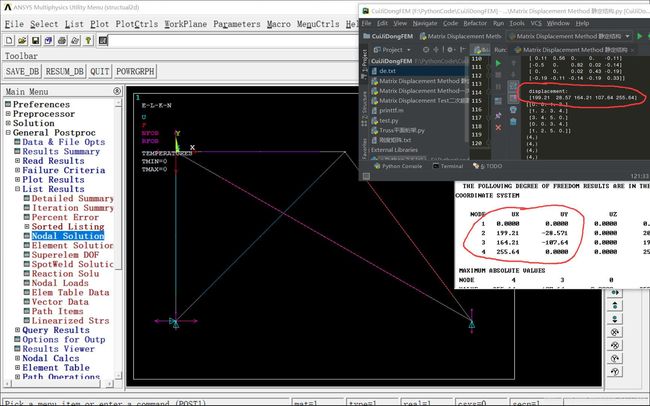
静 定 结 构 ( 很 惊 讶 滑 动 铰 支 座 水 平 位 移 如 此 之 大 ! ) 静定结构(很惊讶滑动铰支座水平位移如此之大!) 静定结构(很惊讶滑动铰支座水平位移如此之大!)
一 次 超 静 定 一次超静定 一次超静定
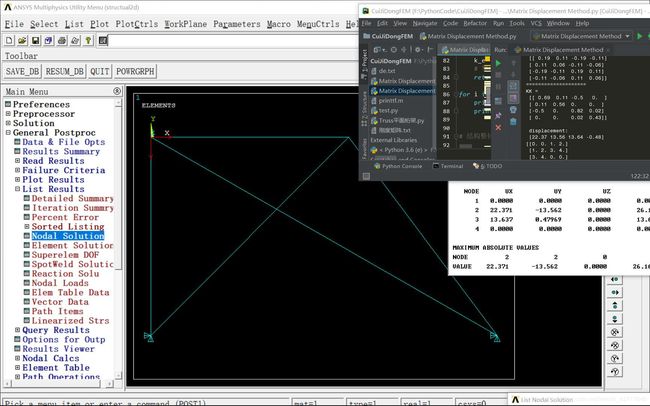
二 次 超 静 定 二次超静定 二次超静定
 哈 哈 , 数 据 基 本 上 是 吻 合 的 … … 哈哈,数据基本上是吻合的…… 哈哈,数据基本上是吻合的……
哈 哈 , 数 据 基 本 上 是 吻 合 的 … … 哈哈,数据基本上是吻合的…… 哈哈,数据基本上是吻合的……