PS2游戏手柄——基于STC15W4K32S4
PS2游戏手柄
文章目录
- PS2游戏手柄
- 1 PS2介绍
- 2 PS2通讯协议介绍
- 3 代码
- h文件
- c文件
1 PS2介绍

PS2手柄是日本SONY公司的PlayStation2 游戏机的遥控手柄。索尼的 PSX系列游戏主机在全球都很畅销。不知什么时候便有人打起 PS2手柄的主意,破解了通讯协议,使得手柄可以接在其他器件上遥控使用,比如遥控我们熟悉的机器人。突出的特点是这款手柄性价比极高,按键丰富,方便扩展到其它应用中。
2 PS2通讯协议介绍
PS2采用的是SPI通信协议,SPI是串行外设接口(Serial Peripheral Interface)的缩写,是一种高速的,全双工,同步的通信总线,并且在芯片的管脚上只占用四根线(DI、DO、CS、CLK),节约了芯片的管脚,同时为PCB的布局上节省空间。

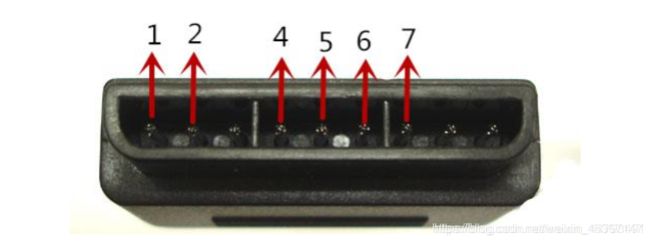
PS2接收器上一共有九根引脚,按上图从左往右,依次为:
1.DI/DAT:信号流向,从手柄到主机,此信号是一个8bit 的串行数据,同步传送于时钟的下降沿。信号的读取在时钟由高到低的变化过程中完成。
2.DO/CMD:信号流向,从主机到手柄,此信号和 DI相对,信号是一个 8bit 的串行数据, 同步传送于时钟的下降沿。
3.NC:空端口。
4.GND:电源地。
5.VCC:接收器工作电源,电源范围 3~5V。
6.CS/SEL:用于提供手柄触发信号。在通讯期间,处于低电平。
7.CLK:时钟信号,由主机发出,用于保持数据同步。
8.NC:空端口。
9.ACK:从手柄到主机的应答信号。此信号在每个8bits数据发送的最后一个周期变低并且CS一直保持低电平,如果CS信号不变低,约60微秒PS主机会试另一个外设。在编程时未使用ACK端口。(可以忽略)
时钟频率 250KHz(4us),如果接收数据不稳定,可以适当的增加频率。 在通讯过中,
一串数据通讯完成后 CS 才会由低转高,不是 1 个字节通讯完成后就由低转高,在通讯期
间,一直处于低电平。
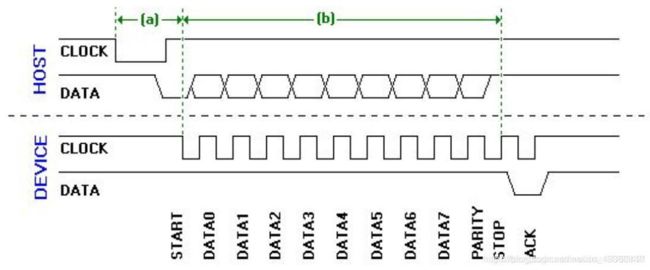
在时钟下降沿时,完成数据(lbit)的发送与接收,发送和接收是同时完成的。当单片
机想读手柄数据或向手柄发送命令时,将会拉低 CS 线电平,并发出一个命令“0x01”;手
柄会回复它的 ID “0x41=绿灯模式,0x73=红灯模式”;在手柄发送 ID 的同时,单片机将
传 送 0x42,请求数据;随后手柄发送出 0x5A,告诉单片机“数据来了”。
idle:数据线空闲,该数据线无数据传送。
一个通讯周期有 9 个字节(8 位),这些数据是依次按位传送。
注意的是:
-
CS线在通讯期间拉低,通信过程中CS信号线在一串数据(9个字节,每个字节为8位)发送完毕后才会拉高,而不是每个字节发送完拉高。
-
DO、DI在在CLK时钟的下降沿完成数据的发送和读取。
下降沿:数字电平从高电平(数字“1”)变为低电平(数字“0”)的那一瞬间叫作下降沿。 -
CLK的每个周期为12us。若在某个时刻,CLK处于下降沿,若此时DO为高电平则取“1”,低电平则取“0”。连续读8次则得到一个字节byte的数据,连续读9个字节就能得到一次传输周期所需要的数据。DI也是一样的,发送和传输同时进行。
具体的通讯过程如下:
以STC15为例:
1、首先STC15拉低CS片选信号线,然后在每个CLK的下降沿读一个bit,每读八个bit(即一个byte)CLK拉高一小段时间,一共读九组bit。
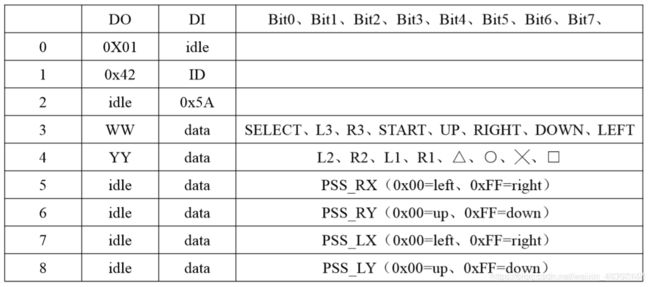
2、第一个byte是STC15发给接收器命令“0X01” 。
3、PS2手柄会在第二个byte回复它的ID(0x41=绿灯模式,0x73=红灯模式),同时第二个byte时STC15发给PS2一个0x42请求数据。
红灯模式时:左右摇杆发送模拟值,0x00~0xFF 之间,且摇杆按下的 键值 L3 、 R3 有效;
绿灯模式时:左右摇杆模拟值为无效,推到极限时,对应发送 UP、RIGHT、DOWN、 LEFT、△、○、╳、□,按键 L3 、 R3 无效。
4、第三个byte PS2 会给主机发送 “0x5A” 告诉STC15数据来了。
5、从第四个byte开始全是接收器给主机发送数据,每个byte定义如上图,当有按键按下,对应位为“0 ”,例如当键“SELECT”被按下时, Data[3]=11111110。
对于整个通讯过程,你理解成下面的一段对话:
拉低CS,表示开始数据通信
byte 0 :
STC15(DO) : 0x01 ------------------------- [现在开始通信]
PS2手柄(DI) : 空 ---------------------------- [空]
byte 1 :
STC15(DO) : 0x42 -------------------------- [请求发送数据]
PS2手柄(DI) : 红灯0x73
绿灯0X41---------------------[现在的ID]
byte 2:
STC15(DO) : 空 ------------------------------ [空]
PS2手柄(DI) : 0X5A ------------------------- [数据来了]
byte 3:
STC15(DO) : 0X00~0XFF ------------------ [右侧小震动电机是否开启]
PS2手柄(DI) : 00000000~11111111 ------- [SELECT、 L3 、 R3、 START 、 UP、 RIGHT、 DOWN、 LEFT 是否被按下,若被按下对应位为0]
byte 4:
STC15(DO) : 0X00~0XFF ------------------ [左侧大震动电机振动幅度]
PS2手柄(DI) : 00000000~11111111 ------- [L2 、 R2、L1 、R1、△、○、╳、□ 是否被按下,若被按下对应位为0]
byte 5:
STC15(DO) : 空 -------------------------------- [空]
PS2手柄(DI) : 0X00~0XFF ------------------ [左侧X轴摇杆模拟量]
byte 6:
STC15(DO) : 空 -------------------------------- [空]
PS2手柄(DI) : 0X00~0XFF ------------------ [左侧Y轴摇杆模拟量]
byte 7:
STC15(DO) : 空 -------------------------------- [空]
PS2手柄(DI) : 0X00~0XFF ------------------ [右侧X轴摇杆模拟量]
byte 8:
STC15(DO) : 空 -------------------------------- [空]
PS2手柄(DI) : 0X00~0XFF ------------------ [右侧Y轴摇杆模拟量]
注意:模拟量只对红灯模式下有效,绿灯模式下摇杆推至极限分别对应 UP、RIGHT、DOWN、 LEFT、△、○、╳、□ 。L3、R3只对红灯模式下有效,在绿灯模式下无效。

在手柄通信前还需要一系列的初始化(是否启动振动电机、是否进行锁存等),详情可以参考下面代码。当然,不进行初始化也是可以的,手柄会默认之前的配置。
——————————————————————————————
3 代码
主机收到的数据在out[]数组中,在其他文件用到PS2时,只要对out[]数组进行处理和分析即可。
h文件
#ifndef __PS2_H__
#define __PS2_H__
#include "STC15Fxxxx.h"
#define Up_L 0xEF
#define Down_L 0xBF
#define Left_L 0x7F
#define Right_L 0xDF
#define Up_R 0xEF
#define Down_R 0xBF
#define Left_R 0x7F
#define Right_R 0xDF
#define L1 0xFB
#define L2 0xFE
#define L3 0xFD
#define R1 0xF7
#define R2 0xFD
#define R3 0xFB
#define UP_L 0x7F
#define UP_L 0x7F
#define UP_L 0x7F
#define UP_L 0x7F
#define UP_L 0x7F
#define UP_L 0x7F
extern u8 out[9];
void PS2_Init(void);
void PS2_ShortPoll(void);
void psin(u8 command);//手柄发送子程序
u8 PS2_Cmd(u8 command);
void Read_PS2(void);
u8 PS2_RedLight(void);
void PS2_EnterConfing(void);
void PS2_TurnOnAnalogMode(void);
void PS2_VibrationMode(void);
void PS2_ExitConfing(void);
void PS2_ClearData();
void PS2_Vibration(u8 motor1,u8 motor2);
u8 PS2_AnologData(u8 button);
#endif
c文件
#include "PS2.h"
#include "delay.h"
/*****************************PS2遥控器说明
out[3]==0xEF//左4个按键中上
out[3]==0xBF//左4个按键中下
out[3]==0x7F//左4个按键中左
out[3]==0xDF//左4个按键中右
out[4]==0xEF//右4个按键中上
out[4]==0xBF//右4个按键中下
out[4]==0x7F//右4个按键中左
out[4]==0xDF//右4个按键中右
out[4]==0xFB//左1,2个按键中1
out[4]==0xFE//左1,2个按键中2
out[4]==0xF7//右1,2个按键中1
out[4]==0xFD//右1,2个按键中2
当按下MODE键手柄MODE LED灯亮起时
out[7] 00——80——FF 左摇杆从左到右
out[8] 00——7F——FF 左摇杆从上到下
out[5] 00——80——FF 右摇杆从左到右
out[6] 00——7F——FF 右摇杆从上到下
当手柄MODE LED灯不亮时,手柄功能同左四右四按键
*******************************/
//******定义接口*********
sbit DATA=P3^0; //手柄接口
sbit CMND=P3^1;
sbit CS=P3^2;
sbit CLK=P3^3;
/********手柄定义变量*********/
u8 code Comd[9]={0x01,0x42,0x00,0x00,0x00,0x00,0x00,0x00,0x00};
u8 out[9];
void PS2_Init(void)
{
DATA=1;
PS2_ShortPoll();
PS2_ShortPoll();
PS2_ShortPoll();
PS2_EnterConfing(); // 进入配置模式
PS2_TurnOnAnalogMode(); // “红绿灯”配置模式,并选择是否保存
PS2_VibrationMode(); // 开启震动模式
PS2_ExitConfing(); // 完成并保存配置
}
//手柄配置初始化:
void PS2_ShortPoll(void)
{
CS=0;
delay_us(16);
PS2_Cmd(0x01);
PS2_Cmd(0x42);
PS2_Cmd(0X00);
PS2_Cmd(0x00);
PS2_Cmd(0x00);
CS=1;
delay_us(16);
}
void delay(u16 n) //delay(x)=(2.5+x)us;
{
u16 i;
for(i=0;i<n;i++) _nop_();
// _nop_();//每个_nop_();大概0.1微秒
}
void psin(u8 command)//手柄发送子程序
{
u8 i;
for(i=0;i<=7;i++) //逐位接收
{
if(command&0x01) //此if下5行语句用时1us
CMND=1;
else
CMND=0;
command=command>>1;
_nop_();
_nop_();
CLK=0;
delay(10);
CLK=1;
delay(3);
}
CMND=1;
}
u8 PS2_Cmd(u8 command)
{
u8 i,j=1;
u8 res=0;
for(i=0;i<=7;i++) //逐位接收
{
if(command&0x01)
CMND=1;
else
CMND=0;
command=command>>1;
_nop_();
_nop_();
CLK=0;
delay(10);
if(DATA) res=res+j;
j=j<<1;
CLK=1;
delay(3);
}
CMND=1;
return res;
}
void Read_PS2(void)//手柄读取程序
{
u8 i;
CS=0;
for(i=0;i<9;i++) //扫描按键
{
out[i]=PS2_Cmd(Comd[i]);
}
CS=1;
}
// 判断是否为红灯模式,0x41=模拟绿灯,0x73=模拟红灯
// 返回值;0,红灯模式
// 其他,其他模式
u8 PS2_RedLight(void)
{
CS=0;
PS2_Cmd(Comd[0]); // 开始命令
PS2_Cmd(Comd[1]); // 请求数据
CS=1;
if( out[1]== 0x73) return 0;
else return 1;
}
//进入配置
void PS2_EnterConfing(void)
{
CS=0;
delay_us(16);
PS2_Cmd(0x01);
PS2_Cmd(0x43);
PS2_Cmd(0x00);
PS2_Cmd(0x01);
PS2_Cmd(0x00);
PS2_Cmd(0x00);
PS2_Cmd(0x00);
PS2_Cmd(0x00);
PS2_Cmd(0x00);
CS=1;
delay_us(16);
}
// 发送模式设置
void PS2_TurnOnAnalogMode(void)
{
CS=0;
PS2_Cmd(0x01);
PS2_Cmd(0x44);
PS2_Cmd(0x00);
PS2_Cmd(0x01);//analog=0x01;digital=0x00 软件设置发送模式
PS2_Cmd(0xEE);//Ox03 锁存设置,即不可通过按键“MODE ”设置模式。 //0xEE 不锁存软件设置,可通过按键“MODE ”设置模式。
PS2_Cmd(0x00);
PS2_Cmd(0x00);
PS2_Cmd(0x00);
PS2_Cmd(0x00);
CS=1;
delay_us(16);
}
// 振动设置
void PS2_VibrationMode(void)
{
CS=0;
delay_us(16);
PS2_Cmd(0x01);
PS2_Cmd(0x4D);
PS2_Cmd(0x00);
PS2_Cmd(0x00);
PS2_Cmd(0x01);
CS=1;
delay_us(16);
}
// 完成并保存配置
void PS2_ExitConfing(void)
{
CS=0;
delay_us(16);
PS2_Cmd(0x01);
PS2_Cmd(0x43);
PS2_Cmd(0x00);
PS2_Cmd(0x00);
PS2_Cmd(0x5A);
PS2_Cmd(0x5A);
PS2_Cmd(0x5A);
PS2_Cmd(0x5A);
PS2_Cmd(0x5A);
CS=1;
delay_us(16);
}
// 清除数据缓冲区
void PS2_ClearData()
{
u8 a;
for(a=0;a<9;a++)
{out[a]=0x00;}
}
//手柄震动函数
//motor1:右侧小震动电机 0x00关,其他开
//motor2:左侧大震动电机 0x40~0xFF,电机开,值越大,震动越大
//只有在初始化函数 void PS2_Init(void)中,对震动电机进行了初始化
//(PS2_VibrationMode();//开启震动模式),这个函数命令才会被执行。
void PS2_Vibration(u8 motor1,u8 motor2)
{
CS=0;
delay_us(16);
PS2_Cmd(0x01); // 开始命令
PS2_Cmd(0x42);// 请求数据
PS2_Cmd(0x00);
PS2_Cmd(motor1);
PS2_Cmd(motor2);
PS2_Cmd(0x00);
PS2_Cmd(0x00);
PS2_Cmd(0x00);
PS2_Cmd(0x00);
CS=1;
delay_us(16);
}
// 得到一个摇杆的模拟量 范围 0~256
u8 PS2_AnologData(u8 button)
{
return out[button];
}