android电池(五):电池 充电IC(PM2301)驱动分析篇
关键词:android 电池 电量计 PL2301任务初始化宏 power_supply 中断线程化
平台信息:
内核:linux2.6/linux3.0
系统:android/android4.0
平台:samsung exynos 4210、exynos 4412 、exynos 5250
作者:xubin341719(欢迎转载,请注明作者)
欢迎指正错误,共同学习、共同进步!!
完整驱动代码&规格书下载:MAX17040_PL2301
android 电池(一):锂电池基本原理篇
android 电池(二):android关机充电流程、充电画面显示
android 电池(三):android电池系统
android电池(四):电池 电量计(MAX17040)驱动分析篇
android电池(五):电池 充电IC(PM2301)驱动分析篇android充电这块,有的电源管理芯片内部包含充电管理,如s5pv210上常用的AT8937。我们这次用的max77686没有充电控制这块,所以我们加入一个充电IC来控制,选用PM2301.
一、PM2301和主控、电池的逻辑
如下图所示:
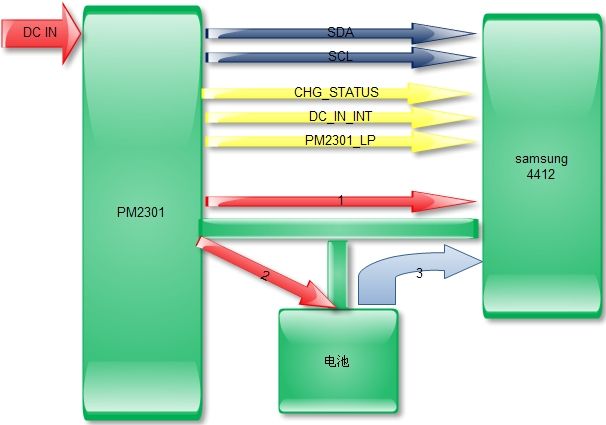
1、蓝色部分:IIC控制接口,这个说得太多了,好多外围器件都是通过IIC控制的,这个一定要熟悉、熟悉、熟烂了,然后可以完成比较多的工作。
2、黄色部分:中断、使能控制脚,CHG_STATUS(IRQ)、 DC_IN_INT(WAKE_UP) 、 PM2301_LP(LPN)、CHARGER_EN(ENN)控制引脚;
IRQ:充电IC的状态,如果有动作通知主控;
WAKE_UP:如果有DC插入,产生中断通知主控;
LPN:
ENN:充电IC使能;
3、PM2301 、电池、系统电压的大致逻辑
标号1:系统电压有PM2301提供;
标号2:PM2301给电池充电;
标号3:系统电压有电池提供;
标号:1和标号:3不同时提供电压给系统,中间有一个MOS管切换;分两种情况:
(1)、不插充电器时,有电池提供电压给系统,走通道标号:3给系统供电;
(2)、插入DC后,系统侦测到DC插入,把3的通道关闭,打开1给系统供电,同时有2给电池充电;
二、PM2301硬件电路
如下所示:
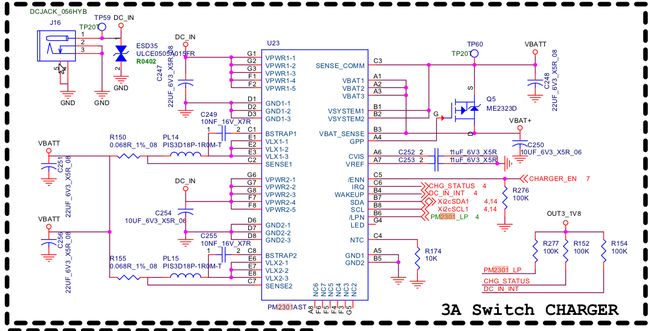
Q5这个MOS管,就是控制系统供电的,没有充电时,VBATT有VBAT+提供,充电时,VBATT有SENSE_COMM提供。
控制脚对应主控的引脚:
| IIC |
IIC ID 为2 |
| CHG_STATUS(IRQ) |
EXYNOS4_GPX1(3) |
| DC_IN_INT(WAKE_UP) |
EXYNOS4_GPX0(7) |
| PM2301_LP(LPN) |
EXYNOS4_GPX1(7) |
| CHARGER_EN(ENN) |
EXYNOS4_GPL2(0) |
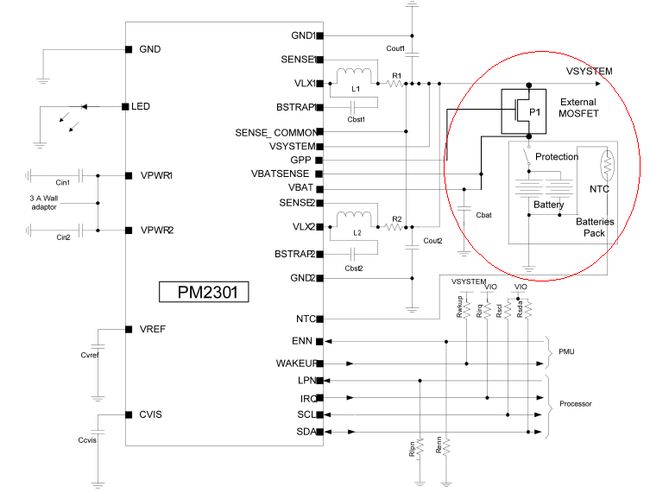
下图为PM2301的参考电路解法,同样看到P1控制VSYSTEM电源部分的切换控制。
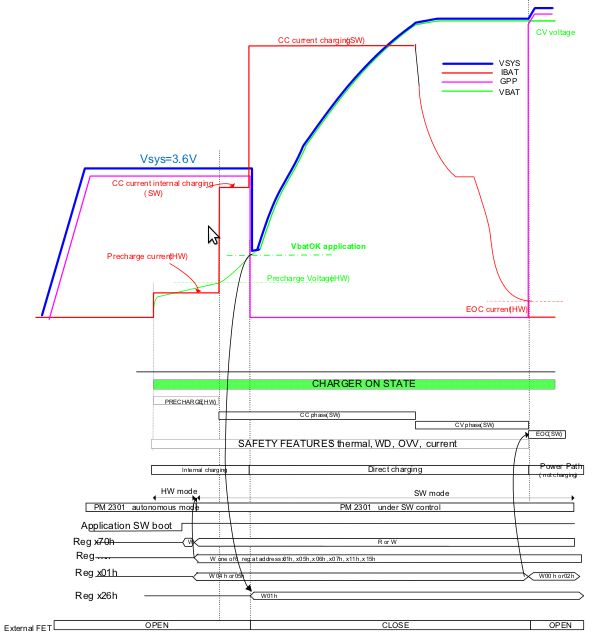
下图为整个电池充电的过程控制:
Trickle mode、Constant current mode (CC mode or fast charge mode)、Constant voltage mode (CV mode) 、End of charge feature
三、PL2301驱动部分
PL2301的硬件、工作原理做简单的解释,接下来我们分析驱动程序:
驱动用到知识点:
IIC的注册;
任务初始化宏(在上一篇我们简单提过);
中断线程化;
1、IIC的注册
这个和上一篇所说的电量计相似;
(1)、pm2301驱动部分
static const struct i2c_device_id pm2301_id[] = {
{ "pm2301", 0 },
{ }
};
MODULE_DEVICE_TABLE(i2c, pm2301_id);
static struct i2c_driver pm2301_i2c_driver = {
.driver = {
.name = "pm2301",
},
.probe = pm2301_probe,
.remove = __devexit_p(pm2301_remove),
.suspend = pm2301_suspend,
.resume = pm2301_resume,
.id_table = pm2301_id,
};
static int __init pm2301_init(void)
{
printk(KERN_INFO "pm2301_init !!\n");
return i2c_add_driver(&pm2301_i2c_driver);
}
module_init(pm2301_init);(2)、平台驱动部分
arch/arm/mach-exynos/mach-smdk4x12.c
static struct i2c_board_info i2c_devs1[] __initdata = {
…………
#ifdef CONFIG_CHARGER_PM2301
{
I2C_BOARD_INFO("pm2301", 0x2c),
.platform_data = &pm2301_platform_data,
},
#endif
…………
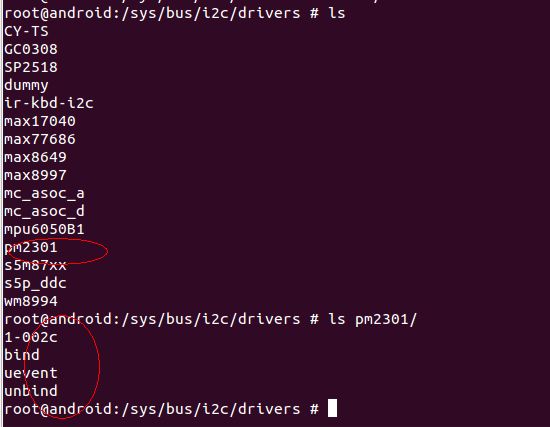
};下图就是我们IIC驱动注册生成的文件;
/sys/bus/i2c/drivers/pm2301
2、关于:pm2301_platform_data这个结构体
static struct pm2301_platform_data pm2301_platform_data = {
.hw_init = pm2301_hw_init,//(1)、硬件接口初始化化;
.gpio_lpn = GPIO_PM2301_LP,//(2)、结构体初始化;
.gpio_irq = GPIO_CHARGER_STATUS,
.gpio_enn = GPIO_CHARGER_ENABLE,
.gpio_wakeup = GPIO_CHARGER_ONLINE,
};arch/arm/mach-exynos/mach-smdk4x12.c
(1)、硬件接口初始化
static int pm2301_hw_init(void)
{
printk("pm2301_hw_init !!\n");
if (gpio_request(GPIO_CHARGER_ONLINE, "GPIO_CHARGER_ONLINE")) {
printk(KERN_ERR "%s :GPIO_CHARGER_ONLINE request port error!\n", __func__);
goto err_gpio_failed;
} else {
s3c_gpio_setpull(GPIO_CHARGER_ONLINE, S3C_GPIO_PULL_NONE);
s3c_gpio_cfgpin(GPIO_CHARGER_ONLINE, S3C_GPIO_SFN(0));
gpio_direction_input(GPIO_CHARGER_ONLINE);
gpio_free(GPIO_CHARGER_ONLINE);
}
if (gpio_request(GPIO_CHARGER_STATUS, "GPIO_CHARGER_STATUS")) {
printk(KERN_ERR "%s :GPIO_CHARGER_STATUS request port error!\n", __func__);
goto err_gpio_failed;
} else {
s3c_gpio_setpull(GPIO_CHARGER_STATUS, S3C_GPIO_PULL_NONE);
s3c_gpio_cfgpin(GPIO_CHARGER_STATUS, S3C_GPIO_SFN(0));
gpio_direction_input(GPIO_CHARGER_STATUS);
gpio_free(GPIO_CHARGER_STATUS);
}
if (gpio_request(GPIO_CHARGER_ENABLE, "GPIO_CHARGER_ENABLE")) {
printk(KERN_ERR "%s :GPIO_CHARGER_ENABLE request port error!\n", __func__);
goto err_gpio_failed;
} else {
s3c_gpio_setpull(GPIO_CHARGER_ENABLE, S3C_GPIO_PULL_NONE);
s3c_gpio_cfgpin(GPIO_CHARGER_ENABLE, S3C_GPIO_SFN(1));
gpio_direction_output(GPIO_CHARGER_ENABLE, 0);
gpio_free(GPIO_CHARGER_ENABLE);
}
if (gpio_request(GPIO_PM2301_LP, "GPIO_PM2301_LP")) {
printk(KERN_ERR "%s :GPIO_PM2301_LP request port error!\n", __func__);
goto err_gpio_failed;
} else {
s3c_gpio_setpull(GPIO_PM2301_LP, S3C_GPIO_PULL_NONE);
s3c_gpio_cfgpin(GPIO_PM2301_LP, S3C_GPIO_SFN(1));
gpio_direction_output(GPIO_PM2301_LP, 1);
gpio_free(GPIO_PM2301_LP);
}
return 1;
err_gpio_failed:
return 0;
}(2)、结构体初始化
Include/linux/pm2301_charger.h
#define GPIO_CHARGER_ONLINE EXYNOS4_GPX0(7)//对应控制脚的主控接口
#define GPIO_CHARGER_STATUS EXYNOS4_GPX1(3)
#define GPIO_CHARGER_ENABLE EXYNOS4_GPL2(0)
#define GPIO_PM2301_LP EXYNOS4_GPX1(7)
struct pm2301_platform_data {
int (*hw_init)(void);
int gpio_enn;
int gpio_wakeup;
int gpio_irq;
int gpio_lpn;
};
extern int pm2301_get_online(void);
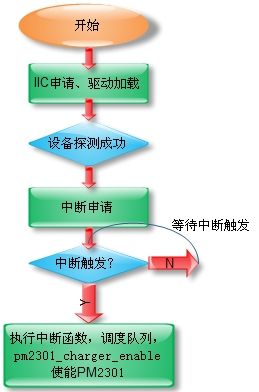
extern int pm2301_get_status(void);3、probe函数分析
如果你是初学者,建议多看程序,你会发现,其实驱动程序的格式大多都是相同的,如这个IIC 器件的, 队列、定时器之类的东西。
static int __devinit pm2301_probe(struct i2c_client *client,
const struct i2c_device_id *id)
{
struct i2c_adapter *adapter = to_i2c_adapter(client->dev.parent);
struct pm2301_chip *chip;
int ret;
printk(KERN_INFO "PM2301 probe !!\n");
//(1)、前面这部分是对IIC的初始化;
if (!i2c_check_functionality(adapter, I2C_FUNC_SMBUS_BYTE))
return -EIO;
chip = kzalloc(sizeof(*chip), GFP_KERNEL);
if (!chip)
return -ENOMEM;
g_chip = chip;
chip->client = client;
chip->pdata = client->dev.platform_data;
i2c_set_clientdata(client, chip);
/* Hardware Init for PM2301 */
if (chip->pdata->hw_init && !(chip->pdata->hw_init())) {
dev_err(&client->dev, "hardware initial failed.\n");
goto err_hw_failed;
}
mutex_init(&i2c_lock);
//(2)、初始化两个队列
INIT_DELAYED_WORK_DEFERRABLE(&chip->work_online, pm2301_online_work);
INIT_DELAYED_WORK_DEFERRABLE(&chip->work_status, pm2301_ststus_work);
//(3)、中断线程化
chip->irq_online = gpio_to_irq(chip->pdata->gpio_wakeup);
chip->irq_status = gpio_to_irq(chip->pdata->gpio_irq);
/* Request IRQ for PM2301 */
ret = request_threaded_irq(chip->irq_online,
NULL, pm2301_dcin,
IRQF_TRIGGER_FALLING | IRQF_TRIGGER_RISING,
"PM2301 DC IN", chip);
if (ret) {
printk(KERN_ERR "Cannot request irq %d for DC (%d)\n",
chip->irq_online, ret);
goto err_hw_failed;
}
#ifdef PM2301_REPORT_STATUS_BY_IRQ
ret = request_threaded_irq(chip->irq_status,
NULL, pm2301_status,
IRQF_TRIGGER_FALLING,
"PM2301 STATUS", chip);
if (ret) {
printk(KERN_ERR "Cannot request irq %d for CHARGE STATUS (%d)\n",
chip->irq_status, ret);
goto err_hw_failed;
}
#endif
charger_initial = 1;
g_has_charged = 0;
g_has_charging_full_or_stop = 0;
#ifdef PM2301_REPORT_STATUS_BY_IRQ
/* Set wakeup source for online pin*/
irq_set_irq_wake(chip->irq_status, 1);
#endif
/* Set wakeup source for online pin*/
irq_set_irq_wake(chip->irq_online, 1);
/* Init default interrupt route for PM2301 */
pm2301_reg_init(chip->client);
/* Init online & status value */
chip->online = pm2301_charger_online(chip);
g_pm2301_online = chip->online; /* Sync to global */
pm2301_charger_enable(chip->client, chip->online);
pm2301_charger_status(chip);
printk(KERN_INFO "PM2301 probe success!!\n");
return 0;
err_hw_failed:
dev_err(&client->dev, "failed: power supply register\n");
i2c_set_clientdata(client, NULL);
kfree(chip);
return ret;
}(1)、前面这部分是对IIC的初始化
这部分就不再多说了,搞来搞去都是这个老样子;
(2)、任务初始化宏
INIT_DELAYED_WORK_DEFERRABLE(&chip->work_online, pm2301_online_work);
INIT_DELAYED_WORK_DEFERRABLE(&chip->work_status, pm2301_ststus_work);把pm2301_online_work加入队列chip->work_online, pm2301_ststus_work加入chip->work_status队列。
(3)、中断线程化 request_threaded_irq
为什么要提出中断线程化?
在 Linux 中,中断具有最高的优先级。不论在任何时刻,只要产生中断事件,内核将立即执行相应的中断处理程序,等到所有挂起的中断和软中断处理完毕后才能执行正常的任务,因此有可能造成实时任务得不到及时的处理。中断线程化之后,中断将作为内核线程运行而且被赋予不同的实时优先级,实时任务可以有比中断线程更高的优先级。这样,具有最高优先级的实时任务就能得到优先处理,即使在严重负载下仍有实时性保证。但是,并不是所有的中断都可以被线程化,比如时钟中断,主要用来维护系统时间以及定时器等,其中定时器是操作系统的脉搏,一旦被线程化,就有可能被挂起,这样后果将不堪设想,所以不应当被线程化。
看下我们程序中如何把中断线程化的:
chip->irq_online = gpio_to_irq(chip->pdata->gpio_wakeup);
chip->irq_status = gpio_to_irq(chip->pdata->gpio_irq);看到这里是否想起:
static struct pm2301_platform_data pm2301_platform_data = {
………………
.gpio_lpn = GPIO_PM2301_LP,
.gpio_irq = GPIO_CHARGER_STATUS,
.gpio_enn = GPIO_CHARGER_ENABLE,
.gpio_wakeup = GPIO_CHARGER_ONLINE,
};
#define GPIO_CHARGER_ONLINE EXYNOS4_GPX0(7)
#define GPIO_CHARGER_STATUS EXYNOS4_GPX1(3)
#define GPIO_CHARGER_ENABLE EXYNOS4_GPL2(0)
#define GPIO_PM2301_LP EXYNOS4_GPX1(7)感觉申请个中断脚,这样有点费劲呀;
中断线程化:
/* Request IRQ for PM2301 */
ret = request_threaded_irq(chip->irq_online,
NULL, pm2301_dcin,
IRQF_TRIGGER_FALLING | IRQF_TRIGGER_RISING,
"PM2301 DC IN", chip);当有插入DC中断出发时调用:
static irqreturn_t pm2301_dcin(int irq, void *_data)
{
struct pm2301_chip *chip = _data;
schedule_delayed_work(&chip->work_online, PM2301_DELAY);
return IRQ_HANDLED;
}Pm2301_dcin调度队列:chip->work_online执行:pm2301_online_work函数
static void pm2301_online_work(struct work_struct *work)
{
struct pm2301_chip *chip;
chip = container_of(work, struct pm2301_chip, work_online.work);
int new_online = pm2301_charger_online(chip);
if (chip->online != new_online) {
chip->online = new_online;
g_pm2301_online = chip->online; /* Sync to global */
pm2301_charger_enable(chip->client, chip->online);//①、初始化充电IC;
#ifdef PM2301_REPORT_STATUS_BY_IRQ
/*To avoid status pin keep low*/
schedule_delayed_work(&chip->work_status, 1000);
#endif
#if defined(CONFIG_BATTERY_MAX17040)
TriggerGasgaugeUpdate();//②、把DC状态更新到max17040;
#endif
}
}①、初始化电IC
这里面主要是写一些寄存器
static void pm2301_charger_enable(struct i2c_client *client, int online)
{
if (online) { /* Enabled Charging*/
int batt_capacity = 0;
batt_capacity = GetGasgaugeCapacity();
/* Don't start charging if battery capacity above 95% when DC plug in*/
if(0) {
//if( batt_capacity >= 95 ) {
pm2301_write_reg(client, 0x01, 0x02);
pm2301_write_reg(client, 0x26, 0x00); /* always keep the register to 0 */
} else {
pm2301_write_reg(client, 0x00, 0x01); /* force resume of charging */
pm2301_write_reg(client, 0x01, 0x06); /* ChEn=1, AutoResume=1 */
pm2301_write_reg(client, 0x05, 0x7A); /* ChEoccurrentLevel:150mA, ChPrechcurrentLevel:100mA, ChCCcurrentLevel:1000mA/2000mA */
pm2301_write_reg(client, 0x06, 0x0A); /* ChVersumeVot:3.6V ChPrechVoltLevel:2.9V */
pm2301_write_reg(client, 0x07, 0x1E); /* ChVoltLevel:4.25V */
pm2301_write_reg(client, 0x26, 0x00); /* always keep the register to 0 */
}
g_has_charged = 1;
} else { /* Disable Charging*/
pm2301_write_reg(client, 0x01, 0x02);
pm2301_write_reg(client, 0x26, 0x00); /* always keep the register to 0 */
g_has_charged = 0;
}
}②、把DC状态更新到max17040
TriggerGasgaugeUpdate()