PCL学习:点云特征-点特征直方图(PFH)描述子
正如点特征表示法所示,表面法线和曲率估计是某个点周围的几何特征基本表示法。虽然计算非常快速容易,但是无法获得太多信息,因为它们只使用很少的几个参数值来近似表示一个点的k邻域的几何特征。然而大部分场景中包含许多特征点,这些特征点有相同的或者非常相近的特征值,因此采用点特征表示法,其直接结果就减少了全局的特征信息。本小节介绍三维特征描述子中的一位成员:点特征直方图(Point Feature Histograms),我们简称为PFH,本小节将介绍它的理论优势,从PCL实现的角度讨论其实施细节。PFH特征不仅与坐标轴三维数据有关,同时还与表面法线有关。
理论基础
PFH计算方式通过参数化查询点与邻域点之间的空间差异,并形成一个多维直方图对点的k邻域几何属性进行描述。直方图所在的高维超空间为特征表示提供了一个可度量的信息空间,对点云对应曲面的6维姿态来说它具有不变性,并且在不同的采样密度或邻域的噪音等级下具有鲁棒性。点特征直方图(PFH)表示法是基于点与其k邻域之间的关系以及它们的估计法线,简言之,它考虑估计法线方向之间所有的相互作用,试图捕获最好的样本表面变化情况,以描述样本的几何特征。因此,合成特征超空间取决于每个点的表面法线估计的质量。如图1所示,表示的是一个查询点(Pq)的PFH计算的影响区域,Pq用红色标注并放在圆球的中间位置,半径为r, Pq的所有k邻元素(即与点Pq的距离小于半径r的所有点)全部互相连接在一个网络中。最终的PFH描述子通过计算邻域内所有两点之间关系而得到的直方图,因此存在一个O(k) 的计算复杂性。
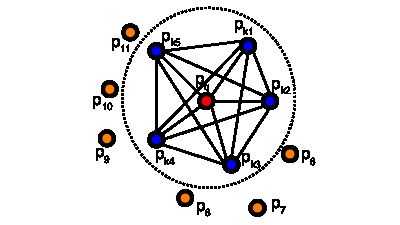
图1 查询点 Pq的PFH计算的影响区域
为了计算两点Pi和Pj及与它们对应的法线Ni和Nj之间的相对偏差,在其中的一个点上定义一个固定的局部坐标系,如图2所示。
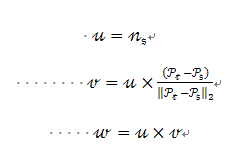
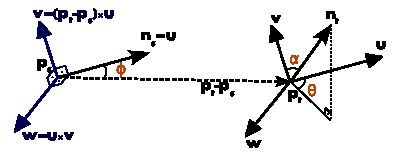
图2 定义一个固定的局部坐标系
使用上图中uvw坐标系,法线 and 之间的偏差可以用一组角度来表示,如下所示:
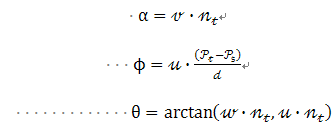
d是两点Ps和Pt之间的欧氏距离, 。计算k邻域内的每一对点的
。计算k邻域内的每一对点的 四组值,这样就把两点和它们法线相关的12个参数(xyz坐标值和法线信息)减少到4个。
四组值,这样就把两点和它们法线相关的12个参数(xyz坐标值和法线信息)减少到4个。
为每一对点估计PFH四元组,可以使用:
computePairFeatures (const Eigen::Vector4f &p1, const Eigen::Vector4f &n1,
const Eigen::Vector4f &p2, const Eigen::Vector4f &n2,
float &f1, float &f2, float &f3, float &f4);
为查询点创建最终的PFH表示,所有的四元组将会以某种统计的方式放进直方图中,这个过程首先把每个特征值范围划分为b个子区间,并统计落在每个子区间的点数目,因为四分之三的特征在上述中为法线之间的角度计量,在三角化圆上可以将它们的参数值非常容易地归一到相同的区间内。一个统计的例子是:把每个特征区间划分成等分的相同数目,为此在一个完全关联的空间内创建有b^4 个区间的直方图。在这个空间中,一个直方图中某一区间统计个数的增一对应一个点的四个特征值。如图3所示,就是点云中不同点的点特征直方图表示法的一个例子,在某些情况下,第四个特征量d在通常由机器人捕获的2.5维数据集中的并不重要,因为临近点间的距离从视点开始是递增的,而并非不变的,在扫描中局部点密度影响特征时,实践证明省略d是有益的。
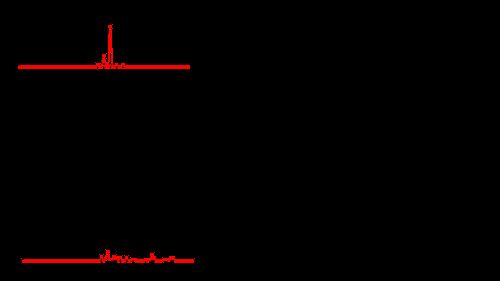
图3 点云中不同点的点特征直方图表示法
估计PFH特征
点特征直方图(PFH)在PCL中的实现是pcl_features模块的一部分。默认PFH的实现使用5个区间分类(例如:四个特征值中的每个都使用5个区间来统计),其中不包括距离(在上文中已经解释过了——但是如果有需要的话,也可以通过用户调用computePairFeatures方法来获得距离值),这样就组成了一个125浮点数元素的特征向量(3^5),其保存在一个pcl::PFHSignature125的点类型中。以下代码段将对输入数据集中的所有点估计其对应的PFH特征。
#include //点类型头文件
#include //pfh特征估计类头文件
...//其他相关操作
pcl::PointCloud::Ptrcloud(new pcl::PointCloud);
pcl::PointCloud::Ptrnormals(new pcl::PointCloud());
...//打开点云文件估计法线等
//创建PFH估计对象pfh,并将输入点云数据集cloud和法线normals传递给它
pcl::PFHEstimation pfh;
pfh.setInputCloud(cloud);
pfh.setInputNormals(normals);
//如果点云是类型为PointNormal,则执行pfh.setInputNormals (cloud);
//创建一个空的kd树表示法,并把它传递给PFH估计对象。
//基于已给的输入数据集,建立kdtree
pcl::KdTreeFLANN::Ptrtree(new pcl::KdTreeFLANN());
pfh.setSearchMethod(tree);
//输出数据集
pcl::PointCloud::Ptrpfhs(new pcl::PointCloud());
//使用半径在5厘米范围内的所有邻元素。
//注意:此处使用的半径必须要大于估计表面法线时使用的半径!!!
pfh.setRadiusSearch(0.05);
//计算pfh特征值
pfh.compute(*pfhs);
// pfhs->points.size ()应该与input cloud->points.size ()有相同的大小,即每个点都有一个pfh特征向量
PFHEstimation类的实际计算程序内部只执行以下:
对点云P中的每个点p
1.得到p点的最近邻元素
2.对于邻域内的每对点,计算其三个角度特征参数值
3.将所有结果统计到一个输出直方图中使用下列代码,从一个k-邻域计算单一的PFH描述子:
computePointPFHSignature (const pcl::PointCloud &cloud,
const pcl::PointCloud &normals,
const std::vector &indices,
int nr_split,
Eigen::VectorXf &pfh_histogram); 此处,cloud变量是包含点的输入点云,normals变量是包含对应cloud的法线的输入点云,indices代表输入点云(点与法线对应)中查询点的k-近邻元素集,nr_split是所分区间的数目,用于每个特征区间的统计过程,pfh_histogram是浮点数向量来存储输出的合成直方图。