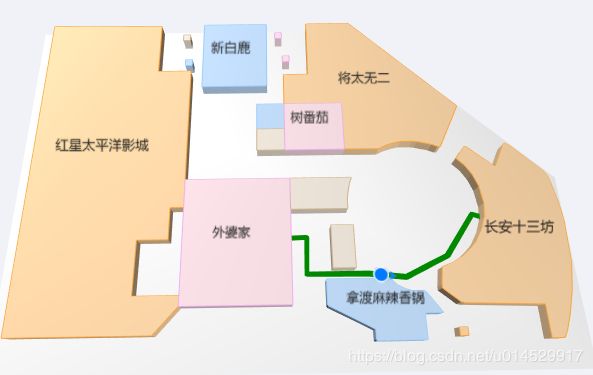
three.js 三维室内地图导航实例
总用three.js做一些零散好玩的效果,却也没怎么把他们整合到一起,最近因一位网友需要,把室内地图导航走通了一下。
这里主要在前端使用了有名的Dijkstra算法,关于此算法这里不再赘述,这里描述一下从路径数据准备到最佳路径输出的整个过程。
在线体验地址
1.节点数据准备
节点是路径生成的基础,我们需要在建筑的基础上,拾取出场景中所有路径节点的坐标,作为基础数据并保存。
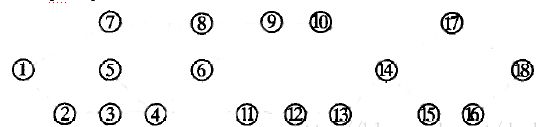
节点数据示例:
/**
* 保存所有节点以及名称,也可包含其他信息
* */
var points = {
0:{name:"节点0",position:[-10.89,0.6,-21.11]},
1:{name:"节点1",position:[1.45,0.6,-21.47]},
2:{name:"节点2",position:[1.39,0.6,-15.38]},
3:{name:"节点3",position:[11.59,0.6,-15.25]},
4:{name:"节点4",position:[0.92,0.6,-25.03]},
5:{name:"节点5",position:[10.88,0.6,-24.98]},
6:{name:"节点6",position:[17.68,0.6,-14.62]},
7:{name:"节点7",position:[14.11,0.6,-9.71]},
8:{name:"节点8",position:[24.87,0.6,-18.04]},
9:{name:"节点9",position:[30.06,0.6,-25.16]},
10:{name:"节点10",position:[25.47,0.6,-35.77]},
11:{name:"节点11",position:[19.44,0.6,-37.08]},
12:{name:"节点12",position:[37.24,0.6,-22.84]},
13:{name:"节点13",position:[15.98,0.6,-48.0]},
14:{name:"节点14",position:[11.80,0.6,-33.81]},
15:{name:"节点15",position:[2.06,0.6,-33.94]},
16:{name:"节点16",position:[2.63,0.6,-41.60]},
17:{name:"节点17",position:[-13.52,0.6,-40.64]},
18:{name:"节点18",position:[-29.23,0.6,-40.49]},
19:{name:"节点19",position:[-11.59,0.6,-56.85]}
}
2.路径数据准备
路径是表示节点与节点之间的连通性以及距离,这个距离也可以替换为路径已知的其他因素消耗。路径数据中,如果不需要区分道路的方向,那么节点1和节点2之间只需要1条路径数据;反之如果需要区分,那么节点1到节点2为1条路径数据,节点2到节点1也是一条路径数据。
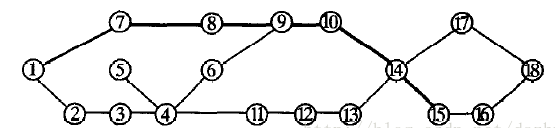
路径数据示例:
/**
* 此项为所有节点的连通性,这里测试数据中区分了道路的双向
* 如果线路不区分双向,则同一条道路的两个方向数据可以合并为一条,比如{src:0,des:1}与{src:1,des:0}可合并为{src:0,des:1}
* */
var routes = [
{src:0,des:1,cost:12.345,extra:"0-1"},
{src:1,des:0,cost:12.345,extra:"1-0"},
{src:0,des:17,cost:19.706,extra:"0-17"},
{src:17,des:0,cost:19.706,extra:"17-0"},
{src:1,des:2,cost:6.090,extra:"1-2"},
{src:2,des:1,cost:6.090,extra:"2-1"},
{src:1,des:4,cost:3.599,extra:"1-4"},
{src:4,des:1,cost:3.599,extra:"4-1"},
{src:2,des:3,cost:10.201,extra:"2-3"},
{src:3,des:2,cost:10.201,extra:"3-2"},
{src:3,des:5,cost:9.756,extra:"3-5"},
{src:5,des:3,cost:9.756,extra:"5-3"},
{src:3,des:6,cost:6.122,extra:"3-6"},
{src:6,des:3,cost:6.122,extra:"6-3"},
{src:4,des:5,cost:9.960,extra:"4-5"},
{src:5,des:4,cost:9.960,extra:"5-4"},
{src:4,des:15,cost:8.983,extra:"4-15"},
{src:15,des:4,cost:8.983,extra:"15-4"},
{src:5,des:14,cost:8.878,extra:"5-14"},
{src:14,des:5,cost:8.878,extra:"14-5"},
{src:6,des:7,cost:6.071,extra:"6-7"},
{src:7,des:6,cost:6.071,extra:"7-6"},
{src:6,des:8,cost:7.962,extra:"6-8"},
{src:8,des:6,cost:7.962,extra:"8-6"},
{src:8,des:9,cost:8.811,extra:"8-9"},
{src:9,des:8,cost:8.811,extra:"9-8"},
{src:9,des:10,cost:11.560,extra:"9-10"},
{src:10,des:9,cost:11.560,extra:"10-9"},
{src:9,des:12,cost:7.546,extra:"9-12"},
{src:12,des:9,cost:7.546,extra:"12-9"},
{src:10,des:11,cost:6.171,extra:"10-11"},
{src:11,des:10,cost:6.171,extra:"11-10"},
{src:11,des:13,cost:11.455,extra:"11-13"},
{src:13,des:11,cost:11.455,extra:"13-11"},
{src:11,des:14,cost:8.310,extra:"11-14"},
{src:14,des:11,cost:8.310,extra:"14-11"},
{src:14,des:15,cost:9.741,extra:"14-15"},
{src:15,des:14,cost:9.741,extra:"15-14"},
{src:15,des:16,cost:7.681,extra:"15-16"},
{src:16,des:15,cost:7.681,extra:"16-15"},
{src:15,des:17,cost:16.960,extra:"15-17"},
{src:17,des:15,cost:16.960,extra:"17-15"},
{src:17,des:18,cost:15.711,extra:"17-18"},
{src:18,des:17,cost:15.711,extra:"18-17"},
{src:17,des:19,cost:16.324,extra:"17-19"},
{src:19,des:17,cost:16.324,extra:"19-17"}
]3.最佳路径选择
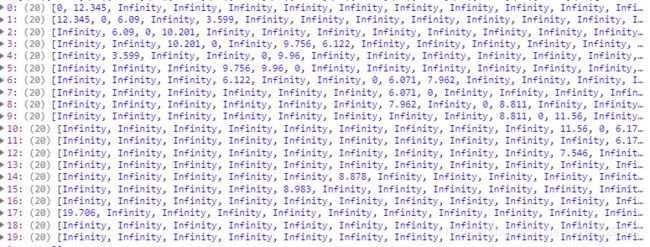
3.1 初始化邻接矩阵
邻接矩阵表示节点和节点之间连接以及消耗,为行列均为总节点数的矩阵,默认值均为Infinity表示无法到达,根据节点基础数据和路径基础数据对邻接矩阵进行填充,填充出能直接到达的矩阵行列。
3.2 寻找最佳路径
使用Dijkstra算法,计算出起始节点到其他所有节点的长度,返回起始节点到其他所有节点的路线消耗(距离)数组以及经过的节点数组。
/**
* @param {Array} adjMatrix 邻接矩阵
* @param {number} sourceV 源点的索引
*/
function Dijkstra(adjMatrix,sourceV) {
...
return {
path: path,
dist: dist
};
}4.路径输出
根据路径经过的节点,找出全部的路径,并打印出所有的路径信息。
/**
* @param {number} v 起点索引
* @param {number} d 终点索引
* @param {Array} adjMatrix 邻接矩阵
*/
function searchPath(v, d, adjMatrix) {
...
return {distance:dist[d],path:rarr}
}5.效果图