AHT10传感器使用记录-esp8266
AHT10传感器使用记录-esp8266
把踩了的坑记录下来,以后忘了还能回头看看权当成功后的记录吧
文章目录
- AHT10传感器使用记录-esp8266
- part1 AHT10是什么
- part2 为什么选择AHT10
- part3 阅读手册的那点事
- 环境搭建
- 代码部分
part1 AHT10是什么
AHT10是一款温湿度传感器,使用IIC通信协议,参考手册可以在 奥松官网中找到
part2 为什么选择AHT10
因为假期在家也回不去学校,为了能够做一些能做的工作我买了esp8266的开发板,单有板子没有执行器和传感器也不成啊,那就整一个传感器玩呗,顺便熟悉一下协议也为后期工作做点 预热
家在北方,选择传感器也是有做智能家居的考量,量程要在 -40°C~40°C 以内,这款传感器刚好能用
part3 阅读手册的那点事
传感器手册下载好,先看工作电压

电压为3.3V,开发板刚好也是3.3V电压输出
- 接线
| aht10 | esp8266 |
|---|---|
| vin | 3V3 |
| GND | GND |
| SCL | SCL(D1) |
| SDA | SDA(D2) |
- 开发板上的丝印有错误,需要注意接线顺序。可以通过获取开发板原理图来查看,可以向店家索要。
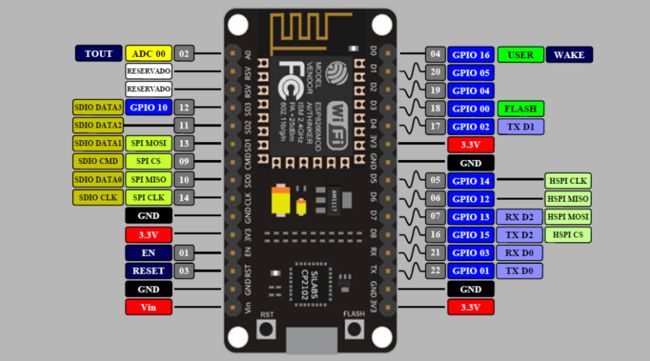
在这里可以看到硬件的介绍。
-
环境搭建
- 使用arduino的ide进行程序烧录,代码编写使用vscode。参考
- vscode安装插件arduino(Microsoft) C/C++ ESP8266FS
- 修改配置文件,arduino设置 settings.json文件中arduino的安装位置。
"arduino.path": "C:\\Arduino"
在view-command palette…中选择编辑 C++ edit configurations(JSON).编辑c_cpp_properties.json 的includePdath属性修改 <用户名> 改成你的计算机名字
{
"configurations": [
{
"name": "Win32",
"includePath": [
"C:\\Users\\<用户名>\\AppData\\Local\\Arduino15\\packages\\esp8266\\tools\\**",
"C:\\Users\\<用户名>\\AppData\\Local\\Arduino15\\packages\\esp8266\\hardware\\esp8266\\2.6.3\\**",
"C:\\Arduino\\tools\\**",
"C:\\Arduino\\hardware\\arduino\\avr\\**",
"{$workspaceFolder}/libraries",
"C:/Arduino/hardware/tools/avr/lib/gcc/avr/5.4.0/include",
"C:/Arduino/hardware/arduino/avr/cores/arduino",
"C:/Arduino/hardware/arduino/avr/variants/standard",
"C:/Arduino"
],
"defines": [
"_DEBUG",
"UNICODE",
"_UNICODE"
],
"compilerPath": "C:/Program Files (x86)/Microsoft Visual Studio/2019/Community/VC/Tools/MSVC/14.24.28314/bin/Hostx64/x64/cl.exe",
"cStandard": "c11",
"cppStandard": "c++17",
"intelliSenseMode": "${default}",
"forcedInclude": []
}
],
"version": 4
}
之后就可以在vscode中写代码,使用 arduino ide 编译和上传。也可以使用快捷键 Ctrl+ Alt+R进行编译
使用Ctrl+ Alt+U进行上传。
代码部分
#include
uint8_t adress = 0x38; //设备地址 默认7位2进制数
float T;
float RH;
int data[6];
void setup()
{
Wire.begin();
Serial.begin(9600);
}
void loop()
{
AHT10_measure();
delay(2000);
}
void AHT10_measure()
{
Wire.beginTransmission(0x38);
Wire.requestFrom(0x38, 6);
while (Wire.available())
{
for (int i = 0; i < 6; i++)
{
data[i] = Wire.read();
// Serial.println(data[i]);
}
if (data[0] & 0x08 == 0)
{
// Serial.println("进行初始化");
// Serial.println(Wire.read());
Wire.write(0xE1);
Wire.write(0x08);
Wire.write(0x00);
}
else
{
Serial.println("不需要初始化");
// Serial.println(Wire.read());
Wire.write(0xAC);
Wire.write(0x33);
Wire.write(0x00);
delayMicroseconds(75);
if (data[0] & 0x80 == 0)
{
Serial.println("需要等待完成");
// Serial.println(Wire.read());
}
else
{
Serial.println("不需要等待");
// Serial.println(Wire.read());
}
}
}
Wire.endTransmission();
RH = ((data[1] << 12) | (data[2] << 4)) | (data[3] >> 4);
T = ((data[3] & 0x0f) << 16) | (data[4] << 8) | data[5];
RH = (RH / pow(2, 20)) * 100;
T = (T / pow(2, 20)) * 200 - 50;
Serial.print("湿度为");
Serial.println(RH);
Serial.print("温度为");
Serial.println(T);
}
值得注意的地方是:每次传输开始既要要求6字节的数据,根据手册所述,取得的第一字节内容为状态字,对状态字进行判断决定后边的5个字节的数据是否是有效的。
Wire.beginTransmission(0x38);
Wire.requestFrom(0x38, 6);
while (Wire.available())
{ for (int i = 0; i < 6; i++)
{
data[i] = Wire.read();
// Serial.println(data[i]);
}
}
后续就是发送测量命令后再次获取6字节计算后边5字节的数据湿度数据由第2、3个字节和第4字节前四位,温度数据由第4字节后四位、第5、6字节组成。温湿度都是20位数据根据手册进行计算:
RH = ((data[1] << 12) | (data[2] << 4)) | (data[3] >> 4);
T = ((data[3] & 0x0f) << 16) | (data[4] << 8) | data[5];
RH = (RH / pow(2, 20)) * 100;
T = (T / pow(2, 20)) * 200 - 50;
这里RH为湿度,T为温度。官网给出的示例程序中计算算式有问题。
/*******************************************/
/*@版权所有:广州奥松电子有限公司 */
/*@作者:温湿度传感器事业部 */
/*@版本:V1.2 */
/*******************************************/
/*******************************************/
/*@版本说明: */
/*@版本号:V1.2 修改AC命令的参数。 */
/*@版本号:V1.1 增加校准输出使能检测。 */
/*@版本号:V1.0 最初版本。 */
/*******************************************/
void Delay_N10us(uint32_t t)//延时函数
{
uint32_t k;
while(t--)
{
for (k = 0; k < 2; k++)//110
;
}
}
void SensorDelay_us(uint32_t t)//延时函数
{
t = t-2;
for(; t>0; t--)
{
Delay_N10us(1);
}
}
void Delay_3us(void) //延时函数
{
Delay_N10us(1);
Delay_N10us(1);
Delay_N10us(1);
Delay_N10us(1);
}
void Delay_1us(void) //延时函数
{
Delay_N10us(1);
Delay_N10us(1);
Delay_N10us(1);
Delay_N10us(1);
Delay_N10us(1);
}
void SDA_Pin_Output_High(void) //将P15配置为输出 , 并设置为高电平, P15作为I2C的SDA
{
Gpio_InitIOExt(1,5,GpioDirOut,TRUE, FALSE, TRUE, FALSE);//config P15 to output
Gpio_SetIO(1,5,1);
}
void SDA_Pin_Output_Low(void) //将P15配置为输出 并设置为低电平
{
Gpio_InitIOExt(1,5,GpioDirOut,TRUE, FALSE, TRUE, FALSE);//config P15 to output
Gpio_SetIO(1,5,0);
}
void SDA_Pin_IN_FLOATING(void) //SDA配置为悬浮输入
{
Gpio_InitIO(1, 5, GpioDirIn);
}
void SCL_Pin_Output_High(void) //SCL输出高电平,P14作为I2C的SCL
{
Gpio_SetIO(1, 4, 1);
}
void SCL_Pin_Output_Low(void) //SCL输出低电平
{
Gpio_SetIO(1, 4, 0);
}
void Init_I2C_Sensor_Port(void) //初始化I2C接口
{
Gpio_InitIOExt(1,5,GpioDirOut,TRUE, FALSE, TRUE, FALSE);//将P15配置为开漏输出 并设置为高电平
Gpio_SetIO(1,5,1);
Gpio_InitIOExt(1,4,GpioDirOut,TRUE, FALSE, TRUE, FALSE);//将P14配置为开漏输出 并设置为高电平
Gpio_SetIO(1,4,1);
}
void I2C_Start(void) //I2C主机发送START信号
{
SDA_Pin_Output_High();
SensorDelay_us(8);
SCL_Pin_Output_High();
SensorDelay_us(8);
SDA_Pin_Output_Low();
SensorDelay_us(8);
SCL_Pin_Output_Low();
SensorDelay_us(8);
}
void ZSSC_I2C_WR_Byte(uint8_t Byte) //往AHT10写一个字节
{
uint8_t Data,N,i;
Data=Byte;
i = 0x80;
for(N=0;N<8;N++)
{
SCL_Pin_Output_Low();
Delay_3us();
if(i&Data)
{
SDA_Pin_Output_High();
}
else
{
SDA_Pin_Output_Low();
}
SCL_Pin_Output_High();
Delay_3us();
Data <<= 1;
}
SCL_Pin_Output_Low();
SensorDelay_us(8);
SDA_Pin_IN_FLOATING();
SensorDelay_us(8);
}
uint8_t ZSSC_I2C_RD_Byte(void)//从AHT10读取一个字节
{
uint8_t Byte,i,a;
Byte = 0;
SCL_Pin_Output_Low();
SDA_Pin_IN_FLOATING();
SensorDelay_us(8);
for(i=0;i<8;i++)
{
SCL_Pin_Output_High();
Delay_1us();
a=0;
if(Gpio_GetIO(1,5))a=1;
Byte = (Byte<<1)|a;
SCL_Pin_Output_Low();
Delay_1us();
}
SDA_Pin_IN_FLOATING();
SensorDelay_us(8);
return Byte;
}
uint8_t Receive_ACK(void) //看AHT10是否有回复ACK
{
uint16_t CNT;
CNT = 0;
SCL_Pin_Output_Low();
SDA_Pin_IN_FLOATING();
SensorDelay_us(8);
SCL_Pin_Output_High();
SensorDelay_us(8);
while((Gpio_GetIO(1,5)) && CNT < 100)
CNT++;
if(CNT == 100)
{
return 0;
}
SCL_Pin_Output_Low();
SensorDelay_us(8);
return 1;
}
void Send_ACK(void) //主机回复ACK信号
{
SCL_Pin_Output_Low();
SensorDelay_us(8);
SDA_Pin_Output_Low();
SensorDelay_us(8);
SCL_Pin_Output_High();
SensorDelay_us(8);
SCL_Pin_Output_Low();
SensorDelay_us(8);
SDA_Pin_IN_FLOATING();
SensorDelay_us(8);
}
void Send_NOT_ACK(void) //主机不回复ACK
{
SCL_Pin_Output_Low();
SensorDelay_us(8);
SDA_Pin_Output_High();
SensorDelay_us(8);
SCL_Pin_Output_High();
SensorDelay_us(8);
SCL_Pin_Output_Low();
SensorDelay_us(8);
SDA_Pin_Output_Low();
SensorDelay_us(8);
}
void Stop_I2C(void) //一条协议结束
{
SDA_Pin_Output_Low();
SensorDelay_us(8);
SCL_Pin_Output_High();
SensorDelay_us(8);
SDA_Pin_Output_High();
SensorDelay_us(8);
}
uint8_t JH_Read_Status(void)//读取AHT10的状态寄存器
{
uint8_t Byte_first;
I2C_Start();
ZSSC_I2C_WR_Byte(0x71);
Receive_ACK();
Byte_first = ZSSC_I2C_RD_Byte();
Send_NOT_ACK();
Stop_I2C();
return Byte_first;
}
uint8_t JH_Read_Cal_Enable(void) //查询cal enable位有没有使能?
{
uint8_t val = 0;//ret = 0,
val = JH_Read_Status();
if((val & 0x68)==0x08) //判断NOR模式和校准输出是否有效
return 1;
else return 0;
}
void JH_SendAC(void) //向AHT10发送AC命令
{
I2C_Start();
ZSSC_I2C_WR_Byte(0x70);
Receive_ACK();
ZSSC_I2C_WR_Byte(0xac);
Receive_ACK();
ZSSC_I2C_WR_Byte(0x33);
Receive_ACK();
ZSSC_I2C_WR_Byte(0x00);
Receive_ACK();
Stop_I2C();
}
void JH_Send_BA(void)//向AHT10发送BA命令
{
I2C_Start();
ZSSC_I2C_WR_Byte(0x70);
Receive_ACK();
ZSSC_I2C_WR_Byte(0xba);
Receive_ACK();
Stop_I2C();
}
void JH_Read_CTdata(uint32_t *ct) //读取AHT10的温度和湿度数据
{
volatile uint8_t Byte_1th=0;
volatile uint8_t Byte_2th=0;
volatile uint8_t Byte_3th=0;
volatile uint8_t Byte_4th=0;
volatile uint8_t Byte_5th=0;
volatile uint8_t Byte_6th=0;
uint32_t RetuData = 0;
uint16_t cnt = 0;
JH_SendAC();//向AHT10发送AC命令
delay_ms(75);//等待75ms
cnt = 0;
while(((JH_Read_Status()&0x80)==0x80))//等待忙状态结束
{
SensorDelay_us(1508);
if(cnt++>=100)
{
break;
}
}
I2C_Start();
ZSSC_I2C_WR_Byte(0x71);//0x70+1 0x70为设备地址 1为方向位
Receive_ACK();
Byte_1th = ZSSC_I2C_RD_Byte();//状态字
Send_ACK();
Byte_2th = ZSSC_I2C_RD_Byte();//湿度字节
Send_ACK();
Byte_3th = ZSSC_I2C_RD_Byte();//湿度字节
Send_ACK();
Byte_4th = ZSSC_I2C_RD_Byte();//高4位为湿度 低4位为温度
Send_ACK();
Byte_5th = ZSSC_I2C_RD_Byte();//温度字节
Send_ACK();
Byte_6th = ZSSC_I2C_RD_Byte();//温度字节
Send_NOT_ACK();
Stop_I2C();
RetuData = (RetuData|Byte_2th)<<8;
RetuData = (RetuData|Byte_3th)<<8;
RetuData = (RetuData|Byte_4th);
RetuData =RetuData >>4;
ct[0] = RetuData;
RetuData = 0;
RetuData = (RetuData|Byte_4th)<<8;
RetuData = (RetuData|Byte_5th)<<8;
RetuData = (RetuData|Byte_6th);
RetuData = RetuData&0xfffff;
ct[1] =RetuData;
}
u8 JH_Init(void) //初始化AHT10
{
Init_I2C_Sensor_Port();
SensorDelay_us(11038);
I2C_Start();
ZSSC_I2C_WR_Byte(0x70); //进入写状态
Receive_ACK();
ZSSC_I2C_WR_Byte(0xe1);//写系统配置寄存器
Receive_ACK();
ZSSC_I2C_WR_Byte(0x08);
Receive_ACK();
ZSSC_I2C_WR_Byte(0x00);
Receive_ACK();
Stop_I2C();
delay_ms(500);//延时0.5S
while(JH_Read_Cal_Enable()==0)//需要等待状态字status的Bit[3]=1时才去读数据。如果Bit[3]不等于1 ,发软件复位0xBA给AHT10,再重新初始化AHT10,直至Bit[3]=1
{
JH_Send_BA(); //复位
delay_ms(100);
SensorDelay_us(11038);
I2C_Start();
ZSSC_I2C_WR_Byte(0x70);
Receive_ACK();
ZSSC_I2C_WR_Byte(0xe1);//写系统配置寄存器
Receive_ACK();
ZSSC_I2C_WR_Byte(0x08);
Receive_ACK();
ZSSC_I2C_WR_Byte(0x00);
Receive_ACK();
Stop_I2C();
count++;
if(count>=10)return 0;
delay_ms(500);
}
return 1;
}
int32_t main(void)
{
uint32_t CT_data[2];
volatile int c1,t1;
u8 ret=0;
ret = JH_Init(); //初始化
if(ret == 0)
{
LCD_display("ERROR"):
while(1);
}
while(1)
{
while(JH_Read_Cal_Enable()==0)//等到校准输出使能位为1,才读取。
{
JH_Init();//如果为0再使能一次
delay_ms(30);
}
//DisableIrq(); //由于是模拟I2C,为读取数据更准确 ,读取之前禁止中断
JH_Read_CTdata(CT_data); //读取温度和湿度 , 可间隔1.5S读一次
c1 = CT_data[0]*1000/1024/1024; //计算得到湿度值(放大了10倍,如果c1=523,表示现在湿度为52.3%)
t1 = CT_data[1] *200*10/1024/1024-500;//计算得到温度值(放大了10倍,如果t1=245,表示现在温度为24.5℃)
//EnableIrq(); //恢复中断
delay_ms(1500); //延时1.5S
//为读取的数据更稳定,还可以使用平均值滤波或者窗口滤波,或者前面读取的值与后面的值相差不能太大。
}
}
t1计算式和手册不一致应该以手册为准。