基于STM32的空气质量监测系统简单案例
基于STM32的空气质量监测系统简单案例
- 系统简介
- 软硬件介绍
- STM32F103开发板
- MQ135空气质量传感器
- DS18B20温度传感器
- 设计流程
- 硬件连接
- 涉及内容
- 效果显示
- 项目源码
- ADC部分
- DS18B20
- RTC部分
- main部分
系统简介
系统使用正点原子的STM32F103 Mini开发板,通过MQ135空气质量传感器,实现简单的空气质量监测案例。
部分代码参考正点原子实验板代码。
软硬件介绍
软件:Keil 5
硬件:
1. STM32F103开发板(正点原子Mini板)
2. MQ135空气质量传感器
3. DS18B20温度传感器
STM32F103开发板

MQ135空气质量传感器


DS18B20温度传感器

设计流程
硬件连接
MQ135模块使用5V进行驱动,D0输出数字信号,A0输出模拟型号。
D0输出就相当一个开关电源,到了设定值进行跳转,并会亮绿灯。
如果你要做一个气体上限报警装置可以使用D0引脚。
我们这里使用的A0引脚进行模拟信号的输入和输出,来计算出对应的有害气体浓度。
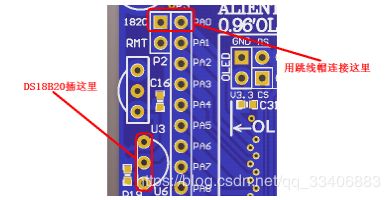
连线:
5V+ 接开发板正极5V
5V- 接开发板负极GND
D0 接板载要开启ADC的引脚 我这里是GPIOA1
DS18B20温度传感器在正点原子的Mini开发板有直接对应的引脚。

涉及内容
主要涉及内容有:STM32的ADC功能,用于将MQ135读取的数据转化为对应的有害空气浓度;STM32 的内部实时时钟(RTC),实现日期时间显示;单总线技术,通过它来实现 STM32 和外部温度传感器(DS18B20)的通信。
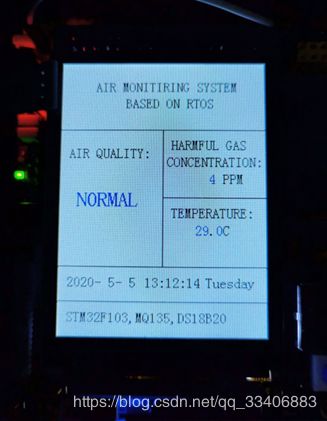
效果显示
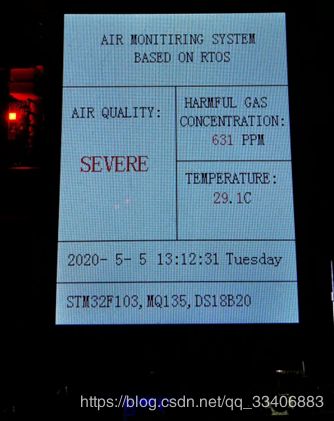
将获取的有害空气质量浓度转化为对应的空气质量等级。显示日期和时间。空气质量正常时,LED绿灯闪烁,字体为蓝色。当空气质量异常时,LED红灯闪烁,字体为红色。
通过打火机喷气,可看出相应的状态变化。
项目源码
ADC部分
#include "adc.h"
#include "delay.h"
//初始化ADC
//这里我们仅以规则通道为例
//我们默认将开启通道0~3
void Adc_Init(void)
{
ADC_InitTypeDef ADC_InitStructure;
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA |RCC_APB2Periph_ADC1 , ENABLE ); //使能ADC1通道时钟
RCC_ADCCLKConfig(RCC_PCLK2_Div6); //设置ADC分频因子6 72M/6=12,ADC最大时间不能超过14M
//PA1 作为模拟通道输入引脚
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_1;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AIN; //模拟输入引脚
GPIO_Init(GPIOA, &GPIO_InitStructure);
ADC_DeInit(ADC1); //复位ADC1,将外设 ADC1 的全部寄存器重设为缺省值
ADC_InitStructure.ADC_Mode = ADC_Mode_Independent; //ADC工作模式:ADC1和ADC2工作在独立模式
ADC_InitStructure.ADC_ScanConvMode = DISABLE; //模数转换工作在单通道模式
ADC_InitStructure.ADC_ContinuousConvMode = DISABLE; //模数转换工作在单次转换模式
ADC_InitStructure.ADC_ExternalTrigConv = ADC_ExternalTrigConv_None; //转换由软件而不是外部触发启动
ADC_InitStructure.ADC_DataAlign = ADC_DataAlign_Right; //ADC数据右对齐
ADC_InitStructure.ADC_NbrOfChannel = 1; //顺序进行规则转换的ADC通道的数目
ADC_Init(ADC1, &ADC_InitStructure); //根据ADC_InitStruct中指定的参数初始化外设ADCx的寄存器
ADC_Cmd(ADC1, ENABLE); //使能指定的ADC1
ADC_ResetCalibration(ADC1); //使能复位校准
while(ADC_GetResetCalibrationStatus(ADC1)); //等待复位校准结束
ADC_StartCalibration(ADC1); //开启AD校准
while(ADC_GetCalibrationStatus(ADC1)); //等待校准结束
// ADC_SoftwareStartConvCmd(ADC1, ENABLE); //使能指定的ADC1的软件转换启动功能
}
//获得ADC值
//ch:通道值 0~3
u16 Get_Adc(u8 ch)
{
//设置指定ADC的规则组通道,一个序列,采样时间
ADC_RegularChannelConfig(ADC1, ch, 1, ADC_SampleTime_239Cycles5 ); //ADC1,ADC通道,采样时间为239.5周期
ADC_SoftwareStartConvCmd(ADC1, ENABLE); //使能指定的ADC1的软件转换启动功能
while(!ADC_GetFlagStatus(ADC1, ADC_FLAG_EOC ));//等待转换结束
return ADC_GetConversionValue(ADC1); //返回最近一次ADC1规则组的转换结果
}
u16 Get_Adc_Average(u8 ch,u8 times)
{
u32 temp_val=0;
u8 t;
for(t=0;t<times;t++)
{
temp_val+=Get_Adc(ch);
delay_ms(5);
}
return temp_val/times;
}
DS18B20
#include "ds18b20.h"
#include "delay.h"
//复位DS18B20
void DS18B20_Rst(void)
{
DS18B20_IO_OUT(); //SET PA0 OUTPUT
DS18B20_DQ_OUT=0; //拉低DQ
delay_us(750); //拉低750us
DS18B20_DQ_OUT=1; //DQ=1
delay_us(15); //15US
}
//等待DS18B20的回应
//返回1:未检测到DS18B20的存在
//返回0:存在
u8 DS18B20_Check(void)
{
u8 retry=0;
DS18B20_IO_IN();//SET PA0 INPUT
while (DS18B20_DQ_IN&&retry<200)
{
retry++;
delay_us(1);
};
if(retry>=200)return 1;
else retry=0;
while (!DS18B20_DQ_IN&&retry<240)
{
retry++;
delay_us(1);
};
if(retry>=240)return 1;
return 0;
}
//从DS18B20读取一个位
//返回值:1/0
u8 DS18B20_Read_Bit(void) // read one bit
{
u8 data;
DS18B20_IO_OUT();//SET PA0 OUTPUT
DS18B20_DQ_OUT=0;
delay_us(2);
DS18B20_DQ_OUT=1;
DS18B20_IO_IN();//SET PA0 INPUT
delay_us(12);
if(DS18B20_DQ_IN)data=1;
else data=0;
delay_us(50);
return data;
}
//从DS18B20读取一个字节
//返回值:读到的数据
u8 DS18B20_Read_Byte(void) // read one byte
{
u8 i,j,dat;
dat=0;
for (i=1;i<=8;i++)
{
j=DS18B20_Read_Bit();
dat=(j<<7)|(dat>>1);
}
return dat;
}
//写一个字节到DS18B20
//dat:要写入的字节
void DS18B20_Write_Byte(u8 dat)
{
u8 j;
u8 testb;
DS18B20_IO_OUT();//SET PA0 OUTPUT;
for (j=1;j<=8;j++)
{
testb=dat&0x01;
dat=dat>>1;
if (testb)
{
DS18B20_DQ_OUT=0;// Write 1
delay_us(2);
DS18B20_DQ_OUT=1;
delay_us(60);
}
else
{
DS18B20_DQ_OUT=0;// Write 0
delay_us(60);
DS18B20_DQ_OUT=1;
delay_us(2);
}
}
}
//开始温度转换
void DS18B20_Start(void)// ds1820 start convert
{
DS18B20_Rst();
DS18B20_Check();
DS18B20_Write_Byte(0xcc);// skip rom
DS18B20_Write_Byte(0x44);// convert
}
//初始化DS18B20的IO口 DQ 同时检测DS的存在
//返回1:不存在
//返回0:存在
u8 DS18B20_Init(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE); //使能PORTA口时钟
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0; //PORTA0 推挽输出
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
GPIO_SetBits(GPIOA,GPIO_Pin_0); //输出1
DS18B20_Rst();
return DS18B20_Check();
}
//从ds18b20得到温度值
//精度:0.1C
//返回值:温度值 (-550~1250)
short DS18B20_Get_Temp(void)
{
u8 temp;
u8 TL,TH;
short tem;
DS18B20_Start (); // ds1820 start convert
DS18B20_Rst();
DS18B20_Check();
DS18B20_Write_Byte(0xcc);// skip rom
DS18B20_Write_Byte(0xbe);// convert
TL=DS18B20_Read_Byte(); // LSB
TH=DS18B20_Read_Byte(); // MSB
if(TH>7)
{
TH=~TH;
TL=~TL;
temp=0;//温度为负
}else temp=1;//温度为正
tem=TH; //获得高八位
tem<<=8;
tem+=TL;//获得底八位
tem=(float)tem*0.625;//转换
if(temp)return tem; //返回温度值
else return -tem;
}
RTC部分
#include "sys.h"
#include "delay.h"
#include "usart.h"
#include "rtc.h"
//Mini STM32开发板
//RTC实时时钟 驱动代码
//正点原子@ALIENTEK
//2010/6/6
_calendar_obj calendar;//时钟结构体
static void RTC_NVIC_Config(void)
{
NVIC_InitTypeDef NVIC_InitStructure;
NVIC_InitStructure.NVIC_IRQChannel = RTC_IRQn; //RTC全局中断
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0; //先占优先级1位,从优先级3位
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0; //先占优先级0位,从优先级4位
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //使能该通道中断
NVIC_Init(&NVIC_InitStructure); //根据NVIC_InitStruct中指定的参数初始化外设NVIC寄存器
}
//实时时钟配置
//初始化RTC时钟,同时检测时钟是否工作正常
//BKP->DR1用于保存是否第一次配置的设置
//返回0:正常
//其他:错误代码
u8 RTC_Init(void)
{
//检查是不是第一次配置时钟
u8 temp=0;
RCC_APB1PeriphClockCmd(RCC_APB1Periph_PWR | RCC_APB1Periph_BKP, ENABLE); //使能PWR和BKP外设时钟
PWR_BackupAccessCmd(ENABLE); //使能后备寄存器访问
if (BKP_ReadBackupRegister(BKP_DR1) != 0x5050) //从指定的后备寄存器中读出数据:读出了与写入的指定数据不相乎
{
BKP_DeInit(); //复位备份区域
RCC_LSEConfig(RCC_LSE_ON); //设置外部低速晶振(LSE),使用外设低速晶振
while (RCC_GetFlagStatus(RCC_FLAG_LSERDY) == RESET) //检查指定的RCC标志位设置与否,等待低速晶振就绪
{
temp++;
delay_ms(10);
}
if(temp>=250)return 1;//初始化时钟失败,晶振有问题
RCC_RTCCLKConfig(RCC_RTCCLKSource_LSE); //设置RTC时钟(RTCCLK),选择LSE作为RTC时钟
RCC_RTCCLKCmd(ENABLE); //使能RTC时钟
RTC_WaitForLastTask(); //等待最近一次对RTC寄存器的写操作完成
RTC_WaitForSynchro(); //等待RTC寄存器同步
RTC_ITConfig(RTC_IT_SEC, ENABLE); //使能RTC秒中断
RTC_WaitForLastTask(); //等待最近一次对RTC寄存器的写操作完成
RTC_EnterConfigMode();/// 允许配置
RTC_SetPrescaler(32767); //设置RTC预分频的值
RTC_WaitForLastTask(); //等待最近一次对RTC寄存器的写操作完成
RTC_Set(2020,5,5,12,59,00); //设置时间
RTC_ExitConfigMode(); //退出配置模式
BKP_WriteBackupRegister(BKP_DR1, 0X5050); //向指定的后备寄存器中写入用户程序数据
}
else//系统继续计时
{
RTC_WaitForSynchro(); //等待最近一次对RTC寄存器的写操作完成
RTC_ITConfig(RTC_IT_SEC, ENABLE); //使能RTC秒中断
RTC_WaitForLastTask(); //等待最近一次对RTC寄存器的写操作完成
}
RTC_NVIC_Config();//RCT中断分组设置
RTC_Get();//更新时间
return 0; //ok
}
//RTC时钟中断
//每秒触发一次
//extern u16 tcnt;
void RTC_IRQHandler(void)
{
if (RTC_GetITStatus(RTC_IT_SEC) != RESET)//秒钟中断
{
RTC_Get();//更新时间
}
if(RTC_GetITStatus(RTC_IT_ALR)!= RESET)//闹钟中断
{
RTC_ClearITPendingBit(RTC_IT_ALR); //清闹钟中断
}
RTC_ClearITPendingBit(RTC_IT_SEC|RTC_IT_OW); //清闹钟中断
RTC_WaitForLastTask();
}
//判断是否是闰年函数
//月份 1 2 3 4 5 6 7 8 9 10 11 12
//闰年 31 29 31 30 31 30 31 31 30 31 30 31
//非闰年 31 28 31 30 31 30 31 31 30 31 30 31
//输入:年份
//输出:该年份是不是闰年.1,是.0,不是
u8 Is_Leap_Year(u16 year)
{
if(year%4==0) //必须能被4整除
{
if(year%100==0)
{
if(year%400==0)return 1;//如果以00结尾,还要能被400整除
else return 0;
}else return 1;
}else return 0;
}
//设置时钟
//把输入的时钟转换为秒钟
//以1970年1月1日为基准
//1970~2099年为合法年份
//返回值:0,成功;其他:错误代码.
//月份数据表
u8 const table_week[12]={0,3,3,6,1,4,6,2,5,0,3,5}; //月修正数据表
//平年的月份日期表
const u8 mon_table[12]={31,28,31,30,31,30,31,31,30,31,30,31};
u8 RTC_Set(u16 syear,u8 smon,u8 sday,u8 hour,u8 min,u8 sec)
{
u16 t;
u32 seccount=0;
if(syear<1970||syear>2099)return 1;
for(t=1970;t<syear;t++) //把所有年份的秒钟相加
{
if(Is_Leap_Year(t))seccount+=31622400;//闰年的秒钟数
else seccount+=31536000; //平年的秒钟数
}
smon-=1;
for(t=0;t<smon;t++) //把前面月份的秒钟数相加
{
seccount+=(u32)mon_table[t]*86400;//月份秒钟数相加
if(Is_Leap_Year(syear)&&t==1)seccount+=86400;//闰年2月份增加一天的秒钟数
}
seccount+=(u32)(sday-1)*86400;//把前面日期的秒钟数相加
seccount+=(u32)hour*3600;//小时秒钟数
seccount+=(u32)min*60; //分钟秒钟数
seccount+=sec;//最后的秒钟加上去
RCC_APB1PeriphClockCmd(RCC_APB1Periph_PWR | RCC_APB1Periph_BKP, ENABLE); //使能PWR和BKP外设时钟
PWR_BackupAccessCmd(ENABLE); //使能RTC和后备寄存器访问
RTC_SetCounter(seccount); //设置RTC计数器的值
RTC_WaitForLastTask(); //等待最近一次对RTC寄存器的写操作完成
RTC_Get();
return 0;
}
//得到当前的时间
//返回值:0,成功;其他:错误代码.
u8 RTC_Get(void)
{
static u16 daycnt=0;
u32 timecount=0;
u32 temp=0;
u16 temp1=0;
timecount=RTC_GetCounter();
temp=timecount/86400; //得到天数(秒钟数对应的)
if(daycnt!=temp)//超过一天了
{
daycnt=temp;
temp1=1970; //从1970年开始
while(temp>=365)
{
if(Is_Leap_Year(temp1))//是闰年
{
if(temp>=366)temp-=366;//闰年的秒钟数
else {temp1++;break;}
}
else temp-=365; //平年
temp1++;
}
calendar.w_year=temp1;//得到年份
temp1=0;
while(temp>=28)//超过了一个月
{
if(Is_Leap_Year(calendar.w_year)&&temp1==1)//当年是不是闰年/2月份
{
if(temp>=29)temp-=29;//闰年的秒钟数
else break;
}
else
{
if(temp>=mon_table[temp1])temp-=mon_table[temp1];//平年
else break;
}
temp1++;
}
calendar.w_month=temp1+1; //得到月份
calendar.w_date=temp+1; //得到日期
}
temp=timecount%86400; //得到秒钟数
calendar.hour=temp/3600; //小时
calendar.min=(temp%3600)/60; //分钟
calendar.sec=(temp%3600)%60; //秒钟
calendar.week=RTC_Get_Week(calendar.w_year,calendar.w_month,calendar.w_date);//获取星期
return 0;
}
//获得现在是星期几
//功能描述:输入公历日期得到星期(只允许1901-2099年)
//输入参数:公历年月日
//返回值:星期号
u8 RTC_Get_Week(u16 year,u8 month,u8 day)
{
u16 temp2;
u8 yearH,yearL;
yearH=year/100; yearL=year%100;
// 如果为21世纪,年份数加100
if (yearH>19)yearL+=100;
// 所过闰年数只算1900年之后的
temp2=yearL+yearL/4;
temp2=temp2%7;
temp2=temp2+day+table_week[month-1];
if (yearL%4==0&&month<3)temp2--;
return(temp2%7);
}
main部分
#include "led.h"
#include "delay.h"
#include "sys.h"
#include "usart.h"
#include "lcd.h"
#include "adc.h"
#include "math.h"
#include "ds18b20.h"
#include "rtc.h"
int main(void)
{
u16 adcx;
float temp,quality;
short temperature;
u8 t;
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);// 设置中断优先级分组2
delay_init(); //延时函数初始化
uart_init(9600); //串口初始化为9600
LED_Init(); //初始化与LED连接的硬件接口
LCD_Init();
Adc_Init(); //ADC初始化
POINT_COLOR=BLACK;
LCD_DrawLine(0,80,240,80);
LCD_DrawLine(120,80,120,240);
LCD_DrawLine(0,240,240,240);
LCD_DrawLine(0,280,240,280);
LCD_DrawLine(120,120,120,240);
LCD_DrawLine(120,160,240,160);
LCD_ShowString(40,20,230,16,16,"AIR MONITIRING SYSTEM");
LCD_ShowString(76,40,230,16,16,"BASED ON RTOS");
LCD_ShowString(10,100,230,16,16,"AIR QUALITY:");
LCD_ShowString(130,90,230,16,16,"HARMFUL GAS");
LCD_ShowString(125,110,230,16,16,"CONCENTRATION:");
LCD_ShowString(150,130,230,16,16," PPM");
LCD_ShowString(130,170,230,16,16,"TEMPERATURE:");
LCD_ShowString(150,190,230,16,16," . C");
//LCD_ShowString(10,250,200,16,16,"2020-4-30 16:00");
LCD_ShowString(10,290,200,16,16,"STM32F103,MQ135,DS18B20");
while(DS18B20_Init()) //DS18B20初始化
{
LCD_ShowString(150,210,200,16,16,"DS18B20 Error");
delay_ms(200);
LCD_Fill(60,130,239,130+16,WHITE);
delay_ms(200);
}
while(RTC_Init()) //RTC初始化 ,一定要初始化成功
{
LCD_ShowString(10,250,200,16,16,"RTC ERROR! ");
delay_ms(800);
LCD_ShowString(10,250,200,16,16,"RTC Trying...");
}
//显示时间
LCD_ShowString(10,250,200,16,16," - - ");
LCD_ShowString(100,250,200,16,16," : : ");
//显示提示信息
//LCD_ShowString(60,130,200,16,16,"ADC_CH1_VAL:");
//LCD_ShowString(60,150,200,16,16,"ADC_CH1_VOL:0.000V");
//LCD_ShowString(60,170,200,16,16,"KQ_ZHILIANG: ppm");
while(1)
{
adcx=Get_Adc_Average(ADC_Channel_1,10);
//LCD_ShowxNum(156,130,adcx,4,16,0);//显示ADC的值
temp=(float)adcx*(3.3/4096);
quality=pow((11.5428 * 35.904 * temp )/(25.5 - 5.1 * temp),1.0/0.6549);
adcx=temp;
//LCD_ShowxNum(156,150,adcx,1,16,0);//显示电压值
temp-=adcx;
//temp*=1000;
//LCD_ShowxNum(172,150,temp,3,16,0X80);
LCD_ShowxNum(150,130,quality,4,16,0);//显示转化后的PPM值
//根据有害气体浓度判断空气质量
if(0<= quality && quality <=75)
LCD_ShowString(20,150,200,16,24,"NORMAL");
else if(quality<=150)
LCD_ShowString(20,150,200,16,24,"MILD ");
else if(quality<=500)
LCD_ShowString(20,150,200,16,24,"MIDDLE");
else
LCD_ShowString(20,150,200,16,24,"SEVERE");
temperature=DS18B20_Get_Temp();
if(temperature<0)
{
LCD_ShowChar(60+40,150,'-',16,0); //显示负号
temperature=-temperature; //转为正数
}else LCD_ShowChar(60+40,150,' ',16,0); //去掉负号
LCD_ShowNum(150+8,190,temperature/10,2,16); //显示正数部分
LCD_ShowNum(150+32,190,temperature%10,1,16); //显示小数部分
//LCD_ShowString(170,190,290,16,16,"26");//显示温度
if(quality>=150) //当到达中度污染时红灯闪烁报警
{
LED1=1;
LED0=!LED0;
POINT_COLOR=RED;//设置字体为红色
}
else
{
LED0=1;
LED1=!LED1; //正常时绿灯闪烁
POINT_COLOR=BLUE;//设置字体为蓝色
}
//显示时间
if(t!=calendar.sec)
{
POINT_COLOR=BLACK;//设置字体为黑色
t=calendar.sec;
LCD_ShowNum(10,250,calendar.w_year,4,16);
LCD_ShowNum(50,250,calendar.w_month,2,16);
LCD_ShowNum(74,250,calendar.w_date,2,16);
LCD_ShowNum(100,250,calendar.hour,2,16);
LCD_ShowNum(124,250,calendar.min,2,16);
LCD_ShowNum(148,250,calendar.sec,2,16);
switch(calendar.week)
{
case 0:
LCD_ShowString(170,250,200,16,16,"Sunday");
break;
case 1:
LCD_ShowString(170,250,200,16,16,"Monday");
break;
case 2:
LCD_ShowString(170,250,200,16,16,"Tuesday");
break;
case 3:
LCD_ShowString(170,250,200,16,16,"Wednesday");
break;
case 4:
LCD_ShowString(170,250,200,16,16,"Thursday");
break;
case 5:
LCD_ShowString(170,250,200,16,16,"Friday");
break;
case 6:
LCD_ShowString(60,148,200,16,16,"Saturday ");
break;
}
}
delay_ms(200);
}
}
