linux内核中的以太网phy芯片的驱动介绍:以lan8720和ip101作为对比
背景:
由于公司开发的新项目中设备需要联网,使用了MZ391的4G模块,并通过rmii接口和phy芯片ip101gr链接。
主控平台rv1108通过rmii接口和phy芯片lan8720相连接。
ip101gr和lan8720通过类似于以太网的双绞线:tx+,tx-,rx+,rx-,相连接。之所以mac和phy要分开,是因为mac属于数字电路部分,主要处理的信号是属于数字信号,将上层ip层等数据通过rmii接口发送给phy,或者将phy发送过来的数据在发送给上层等。phy属于模拟电路部分,主要处理魔力电路信号,就是将从rmii接收到的数据转换成可以通过网线传输的差分模拟信号,或者是将网线上接收到的差分模拟信号转换为可以通过rmii发送的数字信号。
硬件链接:https://blog.csdn.net/u010299133/article/details/87716700
驱动介绍(主要对比以下两个文件):
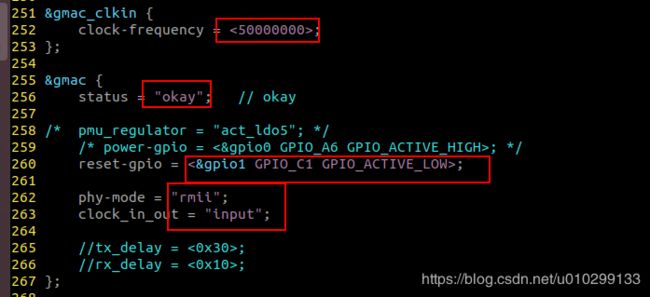
dts文件加上mac的配置
lan8720a的驱动代码:drivers/net/phy/smsc.c
ip101gr的驱动代码:drivers/net/phy/icplus.c
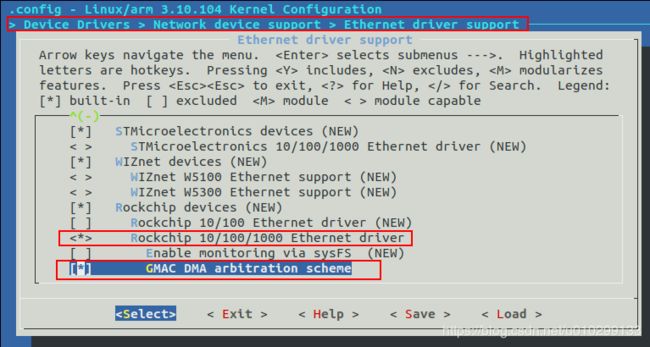
在内核中需要sudo make menuconfig中选择好相应的驱动,在编译的时候能够编译进入内核。

当然如果想要phy芯片能够正常工作,还必须在menuconfig中选择好mac驱动,由于以太网传输数据量大,所以在芯片的mac和我们这里介绍的phy芯片之间都需要使用到dma:
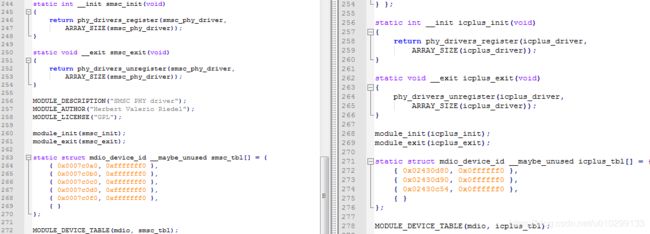
驱动的注册和注销:
在内核加载完成后,会执行相应的驱动的插入函数中的phy驱动的注册。
其中比较重要的参数:phy_driver结构体
phy_id:the result of reading the UID register of this phy type,and them with the phy_id_mask。this driver only work for phys with id which match this field
name:the friendly name of the phy type
phy_id_mask:the defines the important bits of the phy_id
features:a list of feature(speed,duplex,etc) supported by the phy
flag:A bit field defining certain other feature this phy support
struct phy_driver {
u32 phy_id;
char *name;
unsigned int phy_id_mask;
u32 features;
u32 flags;
/*
* Called to initialize the PHY,
* including after a reset
*/
int (*config_init)(struct phy_device *phydev);
/*
* Called during discovery. Used to set
* up device-specific structures, if any
*/
int (*probe)(struct phy_device *phydev);
/* PHY Power Management */
int (*suspend)(struct phy_device *phydev);
int (*resume)(struct phy_device *phydev);
/*
* Configures the advertisement and resets
* autonegotiation if phydev->autoneg is on,
* forces the speed to the current settings in phydev
* if phydev->autoneg is off
*/
int (*config_aneg)(struct phy_device *phydev);
/* Determines the negotiated speed and duplex */
int (*read_status)(struct phy_device *phydev);
/* Clears any pending interrupts */
int (*ack_interrupt)(struct phy_device *phydev);
/* Enables or disables interrupts */
int (*config_intr)(struct phy_device *phydev);
/*
* Checks if the PHY generated an interrupt.
* For multi-PHY devices with shared PHY interrupt pin
*/
int (*did_interrupt)(struct phy_device *phydev);
/* Clears up any memory if needed */
void (*remove)(struct phy_device *phydev);
/* Returns true if this is a suitable driver for the given
* phydev. If NULL, matching is based on phy_id and
* phy_id_mask.
*/
int (*match_phy_device)(struct phy_device *phydev);
/* Handles ethtool queries for hardware time stamping. */
int (*ts_info)(struct phy_device *phydev, struct ethtool_ts_info *ti);
/* Handles SIOCSHWTSTAMP ioctl for hardware time stamping. */
int (*hwtstamp)(struct phy_device *phydev, struct ifreq *ifr);
/*
* Requests a Rx timestamp for 'skb'. If the skb is accepted,
* the phy driver promises to deliver it using netif_rx() as
* soon as a timestamp becomes available. One of the
* PTP_CLASS_ values is passed in 'type'. The function must
* return true if the skb is accepted for delivery.
*/
bool (*rxtstamp)(struct phy_device *dev, struct sk_buff *skb, int type);
/*
* Requests a Tx timestamp for 'skb'. The phy driver promises
* to deliver it using skb_complete_tx_timestamp() as soon as a
* timestamp becomes available. One of the PTP_CLASS_ values
* is passed in 'type'.
*/
void (*txtstamp)(struct phy_device *dev, struct sk_buff *skb, int type);
/* Some devices (e.g. qnap TS-119P II) require PHY register changes to
* enable Wake on LAN, so set_wol is provided to be called in the
* ethernet driver's set_wol function. */
int (*set_wol)(struct phy_device *dev, struct ethtool_wolinfo *wol);
/* See set_wol, but for checking whether Wake on LAN is enabled. */
void (*get_wol)(struct phy_device *dev, struct ethtool_wolinfo *wol);
struct device_driver driver;
};.config_aneg = genphy_config_aneg,
/**
* genphy_config_aneg - restart auto-negotiation or write BMCR
* @phydev: target phy_device struct
*
* Description: If auto-negotiation is enabled, we configure the
* advertising, and then restart auto-negotiation. If it is not
* enabled, then we write the BMCR.
*/
int genphy_config_aneg(struct phy_device *phydev)
{
int result;
if (AUTONEG_ENABLE != phydev->autoneg)
return genphy_setup_forced(phydev);
result = genphy_config_advert(phydev);
if (result < 0) /* error */
return result;
if (result == 0) {
/* Advertisement hasn't changed, but maybe aneg was never on to
* begin with? Or maybe phy was isolated? */
int ctl = phy_read(phydev, MII_BMCR);
if (ctl < 0)
return ctl;
if (!(ctl & BMCR_ANENABLE) || (ctl & BMCR_ISOLATE))
result = 1; /* do restart aneg */
}
/* Only restart aneg if we are advertising something different
* than we were before. */
if (result > 0)
result = genphy_restart_aneg(phydev);
return result;
}
EXPORT_SYMBOL(genphy_config_aneg);.read_status = lan87xx_read_status,
static int lan87xx_read_status(struct phy_device *phydev)
{
int err = genphy_read_status(phydev);
if (!phydev->link) {
/* Disable EDPD to wake up PHY */
int rc = phy_read(phydev, MII_LAN83C185_CTRL_STATUS);
if (rc < 0)
return rc;
rc = phy_write(phydev, MII_LAN83C185_CTRL_STATUS,
rc & ~MII_LAN83C185_EDPWRDOWN);
if (rc < 0)
return rc;
/* Sleep 64 ms to allow ~5 link test pulses to be sent */
msleep(64);
/* Re-enable EDPD */
rc = phy_read(phydev, MII_LAN83C185_CTRL_STATUS);
if (rc < 0)
return rc;
rc = phy_write(phydev, MII_LAN83C185_CTRL_STATUS,
rc | MII_LAN83C185_EDPWRDOWN);
if (rc < 0)
return rc;
}
return err;
}.config_init = smsc_phy_config_init,
static int smsc_phy_config_init(struct phy_device *phydev)
{
int rc = phy_read(phydev, MII_LAN83C185_SPECIAL_MODES);
if (rc < 0)
return rc;
/* If the SMSC PHY is in power down mode, then set it
* in all capable mode before using it.
*/
if ((rc & MII_LAN83C185_MODE_MASK) == MII_LAN83C185_MODE_POWERDOWN) {
int timeout = 50000;
/* set "all capable" mode and reset the phy */
rc |= MII_LAN83C185_MODE_ALL;
phy_write(phydev, MII_LAN83C185_SPECIAL_MODES, rc);
phy_write(phydev, MII_BMCR, BMCR_RESET);
/* wait end of reset (max 500 ms) */
do {
udelay(10);
if (timeout-- == 0)
return -1;
rc = phy_read(phydev, MII_BMCR);
} while (rc & BMCR_RESET);
}
rc = phy_read(phydev, MII_LAN83C185_CTRL_STATUS);
if (rc < 0)
return rc;
/* Enable energy detect mode for this SMSC Transceivers */
rc = phy_write(phydev, MII_LAN83C185_CTRL_STATUS,
rc | MII_LAN83C185_EDPWRDOWN);
if (rc < 0)
return rc;
return smsc_phy_ack_interrupt (phydev);
}.ack_interrupt = smsc_phy_ack_interrupt,
static int smsc_phy_ack_interrupt(struct phy_device *phydev)
{
int rc = phy_read (phydev, MII_LAN83C185_ISF);
return rc < 0 ? rc : 0;
}.config_intr = smsc_phy_config_intr,
static int smsc_phy_config_intr(struct phy_device *phydev)
{
int rc = phy_write (phydev, MII_LAN83C185_IM,
((PHY_INTERRUPT_ENABLED == phydev->interrupts)
? MII_LAN83C185_ISF_INT_PHYLIB_EVENTS
: 0));
return rc < 0 ? rc : 0;
}.suspend = genphy_suspend,
int genphy_suspend(struct phy_device *phydev)
{
int value;
mutex_lock(&phydev->lock);
value = phy_read(phydev, MII_BMCR);
phy_write(phydev, MII_BMCR, (value | BMCR_PDOWN));
mutex_unlock(&phydev->lock);
return 0;
}
EXPORT_SYMBOL(genphy_suspend);.resume = genphy_resume,
int genphy_resume(struct phy_device *phydev)
{
int value;
mutex_lock(&phydev->lock);
value = phy_read(phydev, MII_BMCR);
phy_write(phydev, MII_BMCR, (value & ~BMCR_PDOWN));
mutex_unlock(&phydev->lock);
return 0;
}
EXPORT_SYMBOL(genphy_resume);其中phy_write和phy_read分别如下:其中mdiobus_read和mdiobus_write位于drivers/net/phy/mdio_bus.c文件中,就是实现对phy芯片上的mdio和mdc的操作。
/**
* phy_read - Convenience function for reading a given PHY register
* @phydev: the phy_device struct
* @regnum: register number to read
*
* NOTE: MUST NOT be called from interrupt context,
* because the bus read/write functions may wait for an interrupt
* to conclude the operation.
*/
static inline int phy_read(struct phy_device *phydev, u32 regnum)
{
return mdiobus_read(phydev->bus, phydev->addr, regnum);
}
/**
* phy_write - Convenience function for writing a given PHY register
* @phydev: the phy_device struct
* @regnum: register number to write
* @val: value to write to @regnum
*
* NOTE: MUST NOT be called from interrupt context,
* because the bus read/write functions may wait for an interrupt
* to conclude the operation.
*/
static inline int phy_write(struct phy_device *phydev, u32 regnum, u16 val)
{
return mdiobus_write(phydev->bus, phydev->addr, regnum, val);
}
phy_device结构体:
/* phy_device: An instance of a PHY
*
* drv: Pointer to the driver for this PHY instance
* bus: Pointer to the bus this PHY is on
* dev: driver model device structure for this PHY
* phy_id: UID for this device found during discovery
* c45_ids: 802.3-c45 Device Identifers if is_c45.
* is_c45: Set to true if this phy uses clause 45 addressing.
* state: state of the PHY for management purposes
* dev_flags: Device-specific flags used by the PHY driver.
* addr: Bus address of PHY
* link_timeout: The number of timer firings to wait before the
* giving up on the current attempt at acquiring a link
* irq: IRQ number of the PHY's interrupt (-1 if none)
* phy_timer: The timer for handling the state machine
* phy_queue: A work_queue for the interrupt
* attached_dev: The attached enet driver's device instance ptr
* adjust_link: Callback for the enet controller to respond to
* changes in the link state.
* adjust_state: Callback for the enet driver to respond to
* changes in the state machine.
*
* speed, duplex, pause, supported, advertising, and
* autoneg are used like in mii_if_info
*
* interrupts currently only supports enabled or disabled,
* but could be changed in the future to support enabling
* and disabling specific interrupts
*
* Contains some infrastructure for polling and interrupt
* handling, as well as handling shifts in PHY hardware state
*/
struct phy_device {
/* Information about the PHY type */
/* And management functions */
struct phy_driver *drv;
struct mii_bus *bus;
struct device dev;
u32 phy_id;
struct phy_c45_device_ids c45_ids;
bool is_c45;
enum phy_state state;
u32 dev_flags;
phy_interface_t interface;
/* Bus address of the PHY (0-31) */
int addr;
/*
* forced speed & duplex (no autoneg)
* partner speed & duplex & pause (autoneg)
*/
int speed;
int duplex;
int pause;
int asym_pause;
/* The most recently read link state */
int link;
/* Enabled Interrupts */
u32 interrupts;
/* Union of PHY and Attached devices' supported modes */
/* See mii.h for more info */
u32 supported;
u32 advertising;
int autoneg;
int link_timeout;
/*
* Interrupt number for this PHY
* -1 means no interrupt
*/
int irq;
/* private data pointer */
/* For use by PHYs to maintain extra state */
void *priv;
/* Interrupt and Polling infrastructure */
struct work_struct phy_queue;
struct delayed_work state_queue;
atomic_t irq_disable;
struct mutex lock;
struct net_device *attached_dev;
void (*adjust_link)(struct net_device *dev);
void (*adjust_state)(struct net_device *dev);
};
参考文献:
https://blog.csdn.net/jk198310/article/details/12909341
https://blog.csdn.net/helloyizhou/article/details/72675533