基于arduino2560+ MPU9250+BMP280+北斗的微惯导系统K802地对地导弹设计和实现
基于arduino2560+ MPU9250+BMP280+北斗的微惯导系统地对地导弹设计和实现
is it better to be feared or respected? 令人尊敬、被人惧怕哪个更好?
i say,is ist too much to ask for both? 我要说,两者不能同时做到吗?
with that in mind, I humbly present the crown jewel
of Freedom Line 公司“自由”系列顶尖产品
It's the first missile system 首个全程动力非弹道导弹系统
to incorporate our proprietary repulse technology 包含了我们自己研发的迅速反击技术
they say the best weapon is one you never have to fire 他们说最好的武器你永远用不到
I respectfully disagree 我很尊敬的表达不同的意见
I prefer the weapon you only have to fire once 我认为最好的武器只需发射一次
that's how Dad did it That's how my does it
for your consideration the missile. 仅供您参考....
1、全程动力,非弹道导弹,微惯引导,GPS或北斗修正,飞行过程中GPS或北斗只短暂开机几次,取得数据后立即关闭,避免被反导系统锁定,特别是北斗接受信号后还要回传信号,不能做到无线电静默,取数据后必须关机。
2、三段式制导(升空、平飞、未端俯冲)
3、三点变轨道,未端发动机加力燃烧和释放热铝片突防,民用技术想几倍音速突防不现实,也不可能。
4、未端采用比例引导和图像识别制导(弃用激光制导)
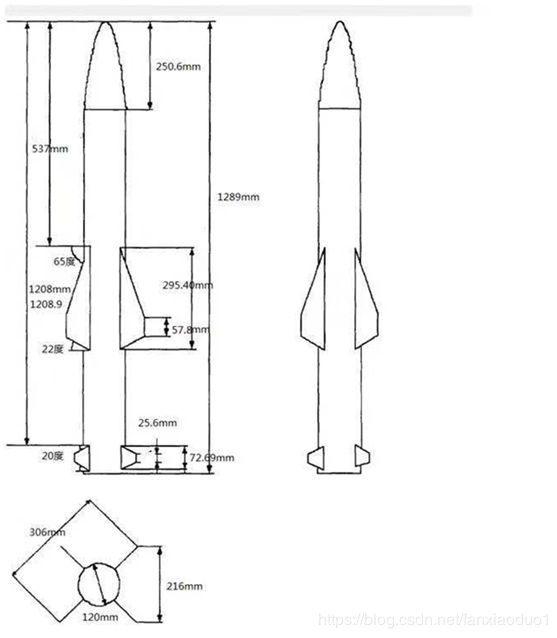
5、本想实现垂直发射,如军舰上的导弹井,垂直发射变平轨道时飞行轨道很霸气,但垂直发射第一次变平轨道,传统舵机太难实现了,必须用喷气舵机,所以选用60度斜角发射。
6、开始我的思路错了,想用三段全部用GPS/北斗导航,理论上可行的,但实际实战时GPS/北斗导航的信号可能被电磁武器干扰或推送假GPS/北斗导航信号或自然地形影响GPS/北斗导航导航模块,所以最后三段全部用经典惯性导航,GPS或北斗只短暂开机几次取数据做修正,末端发动机加力燃烧后攻击前完全停止GPS或北斗模块工作。
ENGINE: JET
OPERATIONAL : 30-50KM
SPEED: 1倍音速
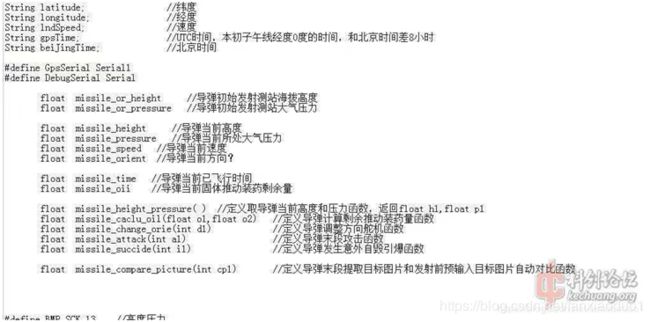
自主研发的制导和飞控系统资料(含全部编译通过的原代码,含贯导微分计算,含加计耦合,地磁耦合,gps修正,含舵机控制)
自主研发的未端图像识别资料(抓目标图生成纹理图、对比原图,识别敌人机场和建筑物等明显目标,建立优先级,自动返回价值高的目标做为攻击目标,含全部编译通过的原代码)


实践是检验真理的唯一标准
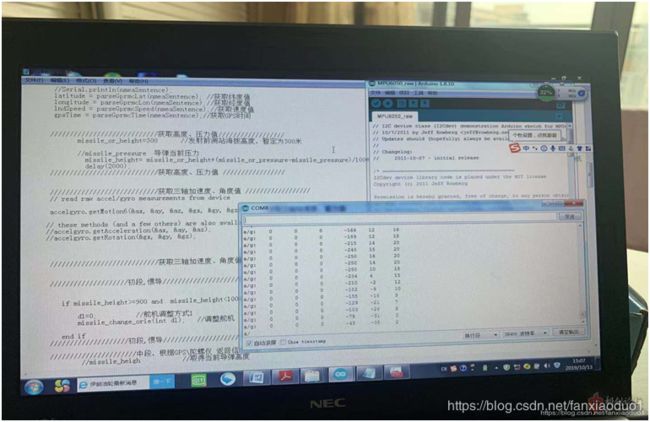
昨天有人在论坛问到 模块的加速度等数据是如何测试的,他提到带上高铁,说实话实际上我是把控制板和笔记本电脑带上了民航客机测试飞行的三段的数据的,速度170公里/每小时左右空客320客机就离开地面了,平飞段大概是1000公里/每小时,比我想的速度要低,无法民间研究就只有这样,如果在军工企业或研究机构,直接给领导说声,带上控制板和笔记本电脑,军用飞机飞一趟,啥子数据都有了。如果我在军工企业或许这些武器十年前我早就实现了,不会现在才成型,也有同事和交流群体,或许我这个年龄都能带新人了,哈哈哈,说来话长,我进入了民营企业.....,说真的我是真心喜欢军工行业,如果生命还有第二次机会,我会选择投身于军工行业,爱上他,并为他奋斗。
2019年10月17日更新
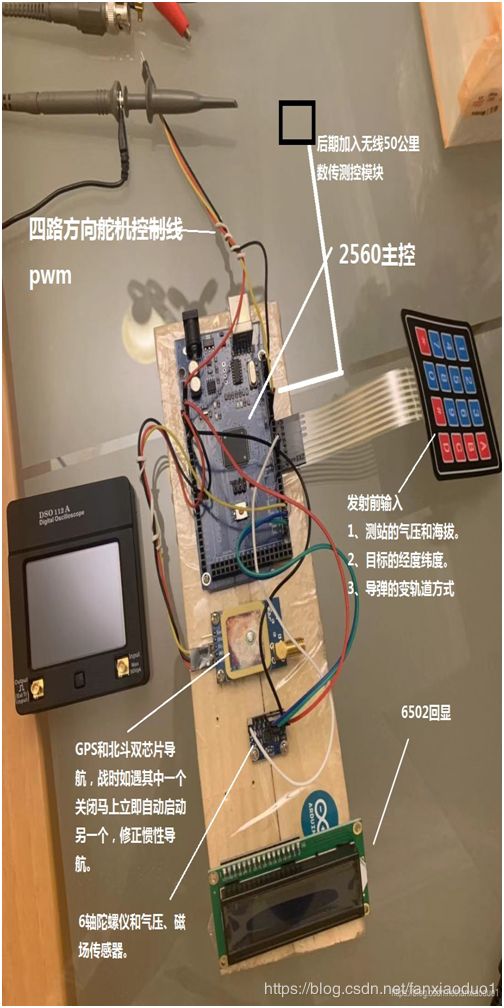
本想加入数传模块如下图,实战时坐在控制室 看大屏幕监控,但数传模块 跳频通讯部分调试还有些问题,虽然可以考虑分时定点开机关机,考虑后暂时不能装上,否则容易被反导系统锁定。
待跳频通讯模块问题解决后我设计研发的所有武器都将联网包括(天基动能武器和各型号导弹),建立信息化攻击平台,最后是引入人工智能,就是实战时指挥部被摧毁了,只要地下服务器集群还在,整个系统还会自动或按规划按时间节点发动对敌方的还击。
注意,1、因法律和法规限制,不提供发动机和战斗部资料,请不要咨询,请多谅解。
2、因资料是全部公开的,无隐含部分,如使用我的设计和代码或自行改造运行造成的一切后果,我不负责。