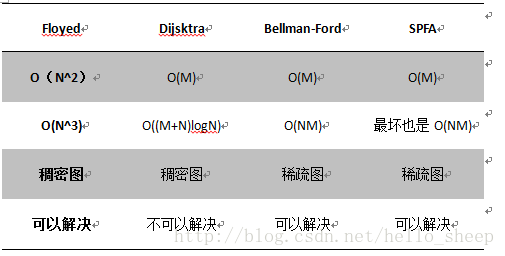
【图论】【最短路径模板+邻接表】【Floyed+Dijsktra+Bellman-Ford+SPFA】【最短路算法对比分析】
ACM模板
【最短路】:最短路是不包含回路的简单路径。
【Floyed】
多源最短路,即要求求出图中每两个顶点之间的最短路。虽然Floyed的复杂度是O(n^3),但是4行却简单很多,本质上是动态规划算法。
思想:从i号顶点到j号顶点只经过前k号顶点的最短路径。
#define INF 999999
int Floyd()
{//初始化n个顶点
for(i = 1; i <= n; i ++)
for(j = 1; j <= n; j ++)
if(i == j)
e[i][j] = INF;
else
e[i][j] = 0;
for(k = 1; k <= n; k ++)//Floyd-Warshall算法核心语句
for(i = 1; i <= n; i ++)
for(j = 1; j <= n; j ++)
if(e[i][j] > e[i][k]+e[k][j])
e[i][j] = e[i][k]+e[k][j];
}【Dijkstra】
Dijkstra算法适合不含负权边的单源最短路(单源最短路是指从源点到其余各个顶点的最短路径)。
思想:每次找到离源点最近的一个顶点,然后以该顶点为中心进行拓展,最终得到源点到其余所有点的最短路径
#define inf 99999999//用inf存储一个我们认为是正无穷的值
//读入n,m。n表示顶点个数,m表示边的条数
memset(book,0,sizeof(book));
for(i = 1; i <= n; i ++)
for(j = 1; j <= n; j ++)
if(i == j)
e[i][j] = 0;
else
e[i][j] = 1;
for(i = 1; i <= m; i ++)
{
scanf("%d%d%d",&t1,&t2,&t3);
e[t1][t2] = t3;
}
//初始化dis数组,1号顶点到其余各个顶点的初始路程
for(i = 1; i <= n; i ++)
dis[i] = e[1][i];
book[1] = 1;
//Dijkstra算法核心语句
for(i = 1; i <= n-1; i ++)
{
min = inf;
//找到离1号顶点最近的顶点
for(j = 1; j <= n; j ++)
{
if(!book[j]&&dis[j]1;
for(j = 1; j <= n; j ++)
{
if(dis[j] > dis[u] + e[u][j])
dis[j] = dis[u] + e[u][j];
}
for(i = 1; i <= n; i ++)//输出
printf("%d ",dis[i]);
printf("\n"); 【Bellman-Ford】
Bellman-Ford算法能解决存在负权边的单源点最短路径问题。可以检测一个图是否存在负权回路:如果在进行了n-1轮松弛后,仍然可以继续成功松弛,说明存在负权边。
#define inf 99999999
struct node{
int from,to,w;
};
node edge[100];
bool Ford()
{
for(i = 1; i <= n; i ++)
dis[i] = inf;
dis[1] = 0;
for(i = 1; i <= n; i ++)
{
flag = false;
for(j = 1; j <= m; j ++)
{
x = edge[i].from ;
y = edge[i].to ;
z = edge[i].w ;
if(dis[y] > dis[x] + z)
{
dis[y] = dis[x] + z;
flag = true;
}
}
if(!flag)
break;
//如果更新到n遍,还能够继续更新dis数组,说明存在负权环
if(flag&&i == n)
return false;//返回false表示这个图存在负权环
}
return true;//返回true表示求最短路成功
}【SPFA】
SPFA是Bellman-Ford算法的队列实现。SPFA加入了一个队列保存信息。用一个数组book来标记一个顶点是否已经加入了队列。
队列优化:只对最短路估计值发生了变化的顶点的所有出边执行松弛操作
求源点到终点的最短路
struct node{
int to;
int w;
int next;
}Edge[maxn];
void Add_edge(int u,int to,int w)
{
Edge[cnt].to = to;//被指向的点
Edge[cnt].w = w;//边权
Edge[cnt].next = head[u];//记录cnt的下一条出边
head[u] = cnt++;//顶点u指向的第一条边
return;
}
void spfa()
{
queue<int>q;
for(i = 0; i <= n; i ++)//初始化dis数组,源点start到其余各点的初始距离
dis[i] = inf;
dis[start] = 0;
book[start] = 1;//源点已经入队
q.push(start);//源点入队
while(!q.empty())
{
nowq = q.front();
q.pop();
book[nowq] = 0;//和广度优先搜索的不同之处,当一个顶点的最短路程估计值变小后,需要再次对其所有出边进行松弛
for(i = head[nowq]; i != -1; i = Edge[i].next)//遍历松弛以nowq为起点的所有出边
{
to = Edge[i].to;
w = Edge[i].w;
if(dis[to] > dis[nowq]+ Edge[i].w ) //使得源点到to的距离变短
{
dis[to] = dis[nowq]+Edge[i].w;
if(!book[to])//同一顶点多次出现在队列中是毫无意义的,所以需要判重
{
book[to] = 1;//标记为已经入队
q.push(to);
}
}
}
}
return ;
}
main()
{
memset(head,-1,sizeof(head));//head[i]存储以i为顶点的第一条边
memset(book,0,sizeof(book));//初始化book数组,一开始都没有加入队列
cnt = 0;//记录边数
Add_edge(u,v,w);//单向则只加入一次
Add_edge(v,u,w);
spfa();
printf(dis[end]);//输出源点到终点的最短距离
}判断负权回路
void addedge(int a,int b,int c)
{
e[num].to = b;
e[num].w = c;
e[num].next = first[a];//邻接表存图
first[a] = num++;
}//dis和fisrt在主函数中全部初始化为-1
bool spfa(int s)
{
int used[N];//用来记录一个顶点入队次数
bool book[N];//标记该点是否在队列中
int head,tail,i,to,now;
queue<int>Q;
memset(used,0,sizeof(used));
memset(book,false,sizeof(book));
Q.push(s);
book[s] = true;
used[s]++;
dis[s] = 0;
while(!Q.empty())
{
now = Q.front() ;
Q.pop() ;
book[now] = false;
for(i = first[now];i!=-1;i = e[i].next)
{
to = e[i].to ;
if(dis[to]>dis[now]+e[i].w)
{
dis[to] = dis[now] + e[i].w ;
used[to]++;
if(used[to]>=n)//一个点使用超过n,一定存在负环
return false;
if(!book[to])//如果顶点不在队列中,入队
{
book[to] = true;//标记为已经入队
Q.push(to) ;
}
}
}
}
return true;//不存在负权边
}
【邻接表】
【邻接表邻接矩阵时间复杂度和空间复杂度分析】
假设图中有n个顶点,m条边
时间复杂度:邻接表直接存储边的信息,有向图是O(M),无向图是O(2*M)。邻接矩阵间接存储边的信息,复杂度是O(N*N)
空间复杂度:邻接表:O(N+M)或O(N+2*M),邻接矩阵:O(N*N)
//数组实现邻接表 共m条边
for(i = 1; i <= m; i ++)
{
scanf("%d%d%d",&u[i],&v[i],&w[i]);
next[i] = first[u[i]];
first[u[i]] = i;
}
for(i = 1;i <= n; i ++)
{
k = first[1];
while(k!=-1)
{
printf("%d %d %d\n",u[k],v[k],w[k]);
k = next[k];
}
}