材料力学知识点总结(20200723更新)
材料力学知识点总结
- 绪论
- 材料力学研究任务
- 变形固体的基本假设
- 外力
- 材料的力学性能与应力应变分析
- 内力、应力与应变
- 材料的力学性能与基本实验
- 应力应变状态分析
- 各项同性材料的胡克定律
- 各项同性材料弹性常数关系
- 材料的基本变形
- 轴向拉压、扭转
- 弯曲
- 弯曲变形
- 梁在简单载荷下的变形
- 组合变形
- 斜弯曲
- 偏心拉压
- 弯扭组合
- 材料失效与强度理论
- 强度理论
- 强度条件
- 强度计算&结构设计
- 轴向拉伸
- 扭转
- 组合变形
- 压杆稳定
- 能量方法
- 单位载荷法
- 图乘法
- 超静定结构
- 一次超静定
- 二次超静定
- 对称载荷
- 超静定解题步骤(一次超静定)
- 弯杆常用积分
- 更新日志
2020年春季学期学习了材料力学( AS31204),作为一名大二结束分流到工程力学的力学狗,偶尔写写总结,记一下原理,总是有好处的,课程教材采用的是张少实,王春香教授主编的新版材料力学第三版,ISBN 978-7-111-58650-0
绪论
材料力学研究任务
- 构件应有足够的强度(strength)
- 构件应有足够的刚度(stiffness)
- 构件应有足够的稳定性(stability)
变形固体的基本假设
- 连续性假设
- 均匀性假设
- 各向同性假设
- 小变形
变形固体基本假设非常重要,具体参考文章:李宏德.谈材力中变形固体的基本假设[J].河南机专学报,1997(03):18-19+17.
外力
外力(external force)包括载荷与支反力,按其作用方式可分为体积力和表面力。
材料的力学性能与应力应变分析
内力、应力与应变

材料的力学性能与基本实验
应力应变状态分析
各项同性材料的胡克定律
各项同性材料弹性常数关系
材料的基本变形
轴向拉压、扭转
弯曲
弯曲变形
梁在简单载荷下的变形
| 序号 | 梁的简图 | 挠曲线方程 | 端截面转角 | 最大挠度 |
|---|---|---|---|---|
| 1 | 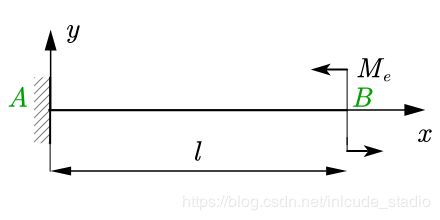 |
v = M e x 2 2 E I v=\frac{M_ex^2}{2EI} v=2EIMex2 | θ B = M e l E I \theta_B=\frac{M_el}{EI} θB=EIMel | v B = M e l 2 2 E I v_B=\frac{M_el^2}{2EI} vB=2EIMel2 |
| 2 |  |
θ B = M e a E I \theta_B=\frac{M_ea}{EI} θB=EIMea | v B = M e a E I ( l − a 2 ) v_B=\frac{M_ea}{EI}\left(l-\frac{a}{2}\right) vB=EIMea(l−2a) | |
| 3 | 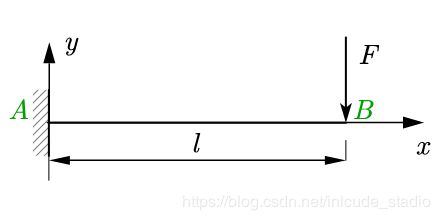 |
y = − F x 2 6 E I ( 3 a − x ) y=-\dfrac{F x^{2}}{6 E I}(3a-x) y=−6EIFx2(3a−x) | θ B = − F l 2 E I \theta_B=-\frac{Fl^2}{EI} θB=−EIFl2 | v B = − F l 3 6 E I v_B=-\frac{Fl^3}{6EI} vB=−6EIFl3 |
| 4 | 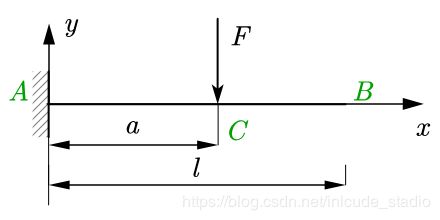 |
{ y = − F x 2 6 E I ( 3 a − x ) , 0 ⩽ x ⩽ a y = − F a 2 6 E I ( 3 x − a ) , a ⩽ x ⩽ l \left\{\begin{matrix}y=-\dfrac{F x^{2}}{6 E I}(3a-x),0\leqslant x\leqslant a\\\\y=-\dfrac{F a^{2}}{6 E I}(3 x-a),a\leqslant x\leqslant l \\\end{matrix}\right. ⎩⎪⎪⎪⎨⎪⎪⎪⎧y=−6EIFx2(3a−x),0⩽x⩽ay=−6EIFa2(3x−a),a⩽x⩽l | θ B = − F a 2 E I \theta_B=-\frac{Fa^2}{EI} θB=−EIFa2 | v B = − F a 2 6 E I ( 3 l − a ) v_B=-\frac{Fa^2}{6EI}(3l-a) vB=−6EIFa2(3l−a) |
| 5 |  |
|||
| 6 |  |
|||
| 7 | 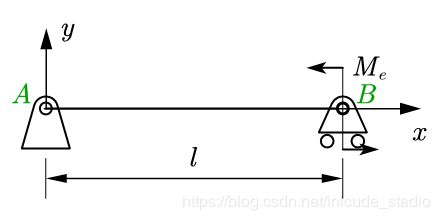 |
|||
| 8 | 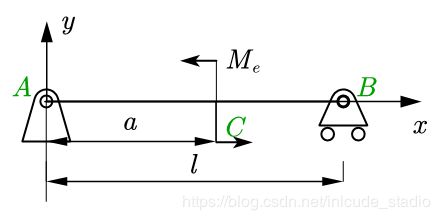 |
|||
| 9 | ||||
| 10 | ||||
| 11 |
组合变形
斜弯曲
σ x = − M z y k I z − M y z k I y \sigma_x=-\frac{M_zy_k}{I_z}-\frac{M_yz_k}{I_y} σx=−IzMzyk−IyMyzk
偏心拉压
弯扭组合
材料失效与强度理论
强度理论
常用的强度理论总共有以下四种,但是强度理论不止以下四种,还有摩尔强度理论等。
| 强度理论 | 应用材料 | 形式 |
|---|---|---|
| 第一强度理论(最大拉应力理论) | 脆性材料 | σ r 1 = σ 1 \sigma_{r_1}=\sigma_1 σr1=σ1 |
| 第二强度理论(最大拉应变理论) | 脆性材料 | σ r 2 = σ 1 − ν ( σ 2 + σ 3 ) \sigma_{r_2}=\sigma_1-\nu(\sigma_2+\sigma_3) σr2=σ1−ν(σ2+σ3) |
| 第三强度理论(最大切应力理论) | 塑性材料 | σ r 3 = σ 1 − σ 3 \sigma_{r_3}=\sigma_1-\sigma_3 σr3=σ1−σ3 |
| 第四强度理论(形变应变能理论) | 塑性材料 | σ r 4 = 1 2 [ ( σ 1 − σ 2 ) 2 + ( σ 2 − σ 3 ) 2 + ( σ 3 − σ 1 ) 2 ] \sigma_{r_4}=\sqrt{\dfrac{1}{2}\left[\left(\sigma_1-\sigma_2\right)^2+\left(\sigma_2-\sigma_3\right)^2+\left(\sigma_3-\sigma_1\right)^2\right]} σr4=21[(σ1−σ2)2+(σ2−σ3)2+(σ3−σ1)2] |
强度条件
许用应力 [ σ ] = σ s n \left[\sigma\right]=\frac{\sigma_s}{n} [σ]=nσs
n n n为安全因数
强度条件 σ max ⩽ [ σ ] \sigma_{\max} \leqslant \left[\sigma\right] σmax⩽[σ]
刚度条件 Δ max ⩽ [ Δ ] \Delta_{\max} \leqslant \left[\Delta\right] Δmax⩽[Δ]
强度计算&结构设计
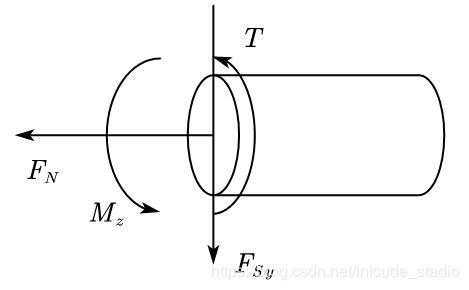
强度计算的核心在于确定危险点,通常确定危险点的方式为:画 F N − x , T − x , F s y − x , M z − x F_N-x,T-x,F_{s_y}-x,M_z-x FN−x,T−x,Fsy−x,Mz−x图。进而寻找 σ x max \sigma_{x\max} σxmax,对其进行强度校核。
结构设计要求危险点应力小于许用应力,本质亦是强度校核。
轴向拉伸
强度校核:
σ max = F A ⩽ [ σ ] \sigma_{\max}=\frac{F}{A}\leqslant\left[\sigma\right] σmax=AF⩽[σ]
结构设计:
- 圆轴: d ⩾ 4 F N π [ σ ] = 1.273 F N [ σ ] d\geqslant\sqrt{\frac{4F_N}{\pi\left[\sigma\right]}}=\sqrt{\frac{1.273F_N}{\left[\sigma\right]}} d⩾π[σ]4FN=[σ]1.273FN
- 正方形轴:
a ⩾ F N [ σ ] a\geqslant\sqrt{\frac{F_N}{\left[\sigma\right]}} a⩾[σ]FN
扭转
小变形情况下,扭转主要产生切应力。
强度条件:
τ 1 ⩽ [ σ ] , τ 2 ⩽ 1 1 + ν [ σ ] , τ 3 ⩽ 1 2 [ σ ] , τ 4 ⩽ 1 3 [ σ ] \tau_1\leqslant\left[\sigma\right],\tau_2\leqslant\frac{1}{1+\nu}\left[\sigma\right],\tau_3\leqslant\frac{1}{\sqrt{2}}\left[\sigma\right],\tau_4\leqslant\frac{1}{\sqrt{3}}\left[\sigma\right] τ1⩽[σ],τ2⩽1+ν1[σ],τ3⩽21[σ],τ4⩽31[σ]
刚度条件:
φ max = 180 ° π ( T G I p ) max ⩽ [ φ ] \varphi_{\max}=\frac{180\degree}{\pi}\left(\frac{T}{GI_p}\right)_{\max}\leqslant\left[\varphi\right] φmax=π180°(GIpT)max⩽[φ]
结构设计:
设 τ ⩽ A [ σ ] , τ max = T max W t \tau\leqslant A\left[\sigma\right],\tau_{\max}=\cfrac{T_{\max}}{W_t} τ⩽A[σ],τmax=WtTmax。
- 实心圆轴
强度设计:
d 1 ⩾ 16 T max A π [ σ ] 3 = 5.093 T max A [ σ ] 3 d_1\geqslant\sqrt[3]{\frac{16T_{\max}}{A\pi \left[\sigma\right]}}=\sqrt[3]{\frac{5.093T_{\max}}{A\left[\sigma\right]}} d1⩾3Aπ[σ]16Tmax=3A[σ]5.093Tmax
刚度设计:
d 2 ⩾ 32 T max × 180 ° G π 2 [ φ ] 4 = 583.6 T max G [ φ ] 4 d_2\geqslant\sqrt[4]{\frac{32T_{\max}\times180\degree}{G\pi^2 \left[\varphi\right]}}=\sqrt[4]{\frac{583.6T_{\max}}{G \left[\varphi\right]}} d2⩾4Gπ2[φ]32Tmax×180°=4G[φ]583.6Tmax - 空心圆轴
强度设计: D 1 ⩾ 5.093 T max A [ σ ] ( 1 − α 4 ) 3 D_1\geqslant\sqrt[3]{\cfrac{5.093T_{\max}}{A\left[\sigma\right]\left(1-\alpha^4\right)}} D1⩾3A[σ](1−α4)5.093Tmax,刚度设计: D 2 ⩾ 583.6 T max G [ φ ] ( 1 − α 4 ) 4 D_2\geqslant\sqrt[4]{\cfrac{583.6T_{\max}}{G \left[\varphi\right]\left(1-\alpha^4\right)}} D2⩾4G[φ](1−α4)583.6Tmax。
组合变形
塑性材料组合内力:
σ r 3 = σ x 2 + 4 τ x y 2 \sigma_{r_3}=\sqrt{\sigma_x^2+4\tau_{xy}^2} σr3=σx2+4τxy2
σ r 3 = σ x 2 + 3 τ x y 2 \sigma_{r_3}=\sqrt{\sigma_x^2+3\tau_{xy}^2} σr3=σx2+3τxy2
弯扭组合:
σ r 3 = 1 W t M 2 + T 2 \sigma_{r_3}=\frac{1}{W_t}\sqrt{M^2+T^2} σr3=Wt1M2+T2
σ r 4 = 1 W t M 2 + 3 4 T 2 \sigma_{r_4}=\frac{1}{W_t}\sqrt{M^2+\frac{3}{4}T^2} σr4=Wt1M2+43T2
压杆稳定
能量方法
单位载荷法
1 ⋅ Δ = ∫ ( F N ⋅ F N ‾ E A + T ⋅ T ‾ G I p + M z ⋅ M z ‾ E I z + k F s y ⋅ F s y ‾ G A ) d x 1\cdot\Delta=\int\left(\frac{F_N\cdot\overline {F_N} }{EA}+\frac{T\cdot\overline {T} }{GI_p}+\frac{M_z\cdot\overline {M_z} }{EI_z}+\frac{kF_{s_y}\cdot\overline {F_{s_y}} }{GA}\right){\rm d} x 1⋅Δ=∫(EAFN⋅FN+GIpT⋅T+EIzMz⋅Mz+GAkFsy⋅Fsy)dx
图乘法
Δ = Ω F N ω F N E A + Ω T ω T G I p + Ω M z ω M z E I z + k Ω F s y ω F s y G A \Delta=\frac{\Omega_{F_N}\omega_{F_N}}{EA}+\frac{\Omega_{T}\omega_{T}}{GI_p}+\frac{\Omega_{M_z}\omega_{M_z}}{EI_z}+\frac{k\Omega_{F_{s_y}}\omega_{F_{s_y}}}{GA} Δ=EAΩFNωFN+GIpΩTωT+EIzΩMzωMz+GAkΩFsyωFsy
超静定结构
一次超静定
力法方程 δ 11 X 1 + Δ 1 F = 0 \delta_{11}X_1+\Delta_{1F}=0 δ11X1+Δ1F=0
二次超静定
力法方程
( δ 11 δ 12 δ 21 δ 22 ) ( X 1 X 2 ) + ( Δ 1 F Δ 2 F ) = ( 0 0 ) \left(\begin{matrix} \delta_{11}&\delta_{12}\\\delta_{21}&\delta_{22} \end{matrix}\right)\left(\begin{matrix} X_1 \\X_2 \end{matrix}\right)+\left(\begin{matrix} \Delta_{1F} \\\Delta_{2F} \end{matrix}\right)=\left(\begin{matrix} 0\\0\end{matrix}\right) (δ11δ21δ12δ22)(X1X2)+(Δ1FΔ2F)=(00)
对称载荷
对称于结构的对称轴,对称截面上,反对称内力为零;
反对称于结构的对称轴,对称截面上,对称内力为零。
结构的对称性能够有效地简化超静定次数,提高解题效率。
超静定解题步骤(一次超静定)
- step1:判断结构对称性,确定超静定次数,列力法方程:
卸载所求点处的支座,并施加约束反力 X 1 X_1 X1(求支座反力类型),设单位力 F ‾ = 1 \overline F=1 F=1;
卸载固定端,改为固定铰支座,并施加约束力偶 X 1 X_1 X1,设单位力矩 M ‾ = 1 \overline M=1 M=1(求力偶矩类型);
断开某杆,设杆内轴力为 X 1 X_1 X1,设单位力 F ‾ = 1 \overline F=1 F=1(求杆件轴力型); - step2:做原载荷作用下的 F N − x , T − x , M z − x F_N-x,T-x,M_z-x FN−x,T−x,Mz−x图;
- step3:忽略全部外载,做单位力(矩)作用下的 F N ‾ − x , T ‾ − x , M z ‾ − x \overline {F_N}-x,\overline T-x,\overline {M_z}-x FN−x,T−x,Mz−x图;
- step4:由摩尔积分或图乘法,求出 δ 11 , Δ 1 F \delta_{11},\Delta_{1F} δ11,Δ1F;
- step5:代入力法方程,解出未知力 X 1 X_1 X1。
二次超静定也采用这个步骤,只不过约束反力、单位力均增加。此时应当合理采用对称性,化简单位力(矩)自乘情况。
弯杆常用积分
∫ sin 3 x = 1 3 cos 3 x − cos x + C \int \sin^3 x=\frac{1}{3}\cos^3 x-\cos x+C ∫sin3x=31cos3x−cosx+C
∫ cos 3 x = − 1 3 sin 3 x + sin x + C \int \cos^3 x=-\frac{1}{3}\sin^3 x+\sin x+C ∫cos3x=−31sin3x+sinx+C
∫ sin 2 x = − 1 4 sin 2 x + 1 2 x + C \int \sin^2 x=-\frac{1}{4}\sin 2x+\frac{1}{2} x+C ∫sin2x=−41sin2x+21x+C
∫ cos 2 x = 1 4 sin 2 x + 1 2 x + C \int \cos^2 x=\frac{1}{4}\sin 2x+\frac{1}{2} x+C ∫cos2x=41sin2x+21x+C
更新日志
- 0720:2020春季学期材料力学A期末考试终于考完了,感觉期末考试题比以往简单的多,由于个人复习爱好(习惯性的大总结),感觉考试总结总结的挺好,遂产生做博客的想法。
- 0721:更新:梁在简单载荷下的变形/强度理论/超静定。
- 0722:更新:超静定/强度理论。
- 0723:更新:组合变形。