【源码】简单的二维运动车辆转向模型与动画
该仿真模型求解了固定地形框架下简单车辆运动的XY位置,并用Matlab图形对结果进行可视化。
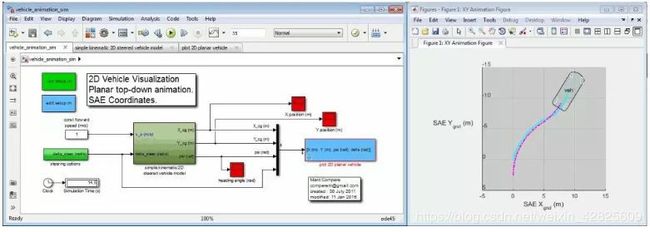
This Simulink model solves for the fixed terrain frame’s XY position of the simple kinematic vehicle motion and visualizes the result using Matlab graphics.
Simulink模型的基本模拟时间步长为h_fixed=0.05(s)或50ms。
The Simulink model’s base simulation timestep is h_fixed=0.05(s), or 50ms.
在一台2GHz的Dell Inspiron笔记本电脑上,该模型以20fps到30fps的动画帧速率实现近实时的运算操作。
On a 2Ghz Dell Inspiron laptop this model achieves near real-time operation at animation frame rates of 20fps to 30fps.
Ackermann转向关系delta_Ack = L / R是轴距长度L和轮距W车辆的近似值,在恒定半径圆上以低速转动时不会打滑。
The Ackermann steering relationship delta_Ack = L / R is an approximation for a vehicle of wheelbase length L and track width W turning without slipping on a constant radius circle at low speed.
首先解压缩.zip文件,将目录更改为解压缩的文件夹,然后在Matlab命令提示下运行setup.m。
Get started by unzipping the .zip file, changing directories to the folder, then running setup.m at the Matlb command prompt.
这将清空工作区,然后用运行Simulink模型和相关动画所需的变量填充该工作区。
This will clear the workspace then populate it with the necessary variables to run the Simulink model and associated animation.
同时还将打开Simulink模型文件。
It will also open the Simulink model file.
参考文献:
(1) Thomas Gillespie, Fundamentals of Vehicle Dynamics, SAE, 1992
(2) Milliken and Milliken, Race Car Vehicle Dynamics, SAE, 2005
(3) J. Y. Wong, Theory of Ground Vehicles, 4th Ed., Wiley, 2008
完整源码下载地址:
http://page2.dfpan.com/fs/flcbj2b21c29416bae1/
更多精彩文章请关注微信号: