有人机/无人机混合编队协同作战研究综述与展望
摘要:有人机与无人机混合编队协同作战是未来空战的重要形式。有人机是中央指挥,而无人机直接接受有人机的指挥和控制,并进行战场态势感知、目标打击等。有人机和无人机可以看成空间上分离而逻辑上一体的巨型虚拟战机,二者优势互补,充分发挥最大综合效能,既提高了有人机的生存能力又延伸了无人机的探测距离范围和攻击距离。本文首先简述了有人机/无人机混合编队协同作战的发展历程,然后重点归纳了协同作战的关键技术原理和国内外研究成果,包括协同态势感知与评估技术、协同任务分配技术、协同航路规划技术、编队飞行与跟踪控制技术,并给出了一个在典型作战任务设定下的协同作战流程。最后对该领域的研究发展方向进行了展望。
关键词 有人机/无人机;混合编队;协同作战;制导控制

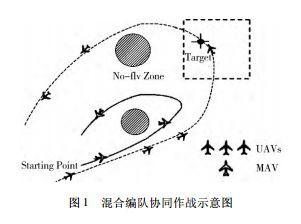
无人机是信息化、无人化战争的重要武器装备,其成本低、体积小、机动性好、效费比高。世界各国竞相发展无人机的最终目标是自主地完成作战任务,作战全程不人为干预。但是目前,因为单架无人机所能发挥的作用效能十分有限,提高对抗能力主要依靠多无人机编队的战术配合来保持规模优势。而无人机编队正常运行依赖地面站控制,但这种传统模式的信息传递速度有限,存在指挥控制范围有限,信号易被干扰和监听的问题,跟不上现代战争快速打击的节奏,很大程度上限制了多无人机体系作战效能的发挥。因此,实现多无人机自主协同作战任重道远,客观上需要有机融入人类的决策智慧。有人机/无人机混合编队协同作战使二者优势互补。无人机群在有人机外圈飞行,相互之间通过数据链通信,实现二者信息共享,根据有人机飞行员的指挥控制开展任务,既提高了有人飞机的生存能力又延伸了无人机的探测距离和攻击距离。有人机/无人机混合编队协同作战示意图如图1所示。
有人机/无人机混合编队协同作战是一个复杂过程,要达到出色的作战效果,涉及到各个环节的良好配合,这包括协同态势感知与评估技术、协同任务分配技术、协同航路规划技术、编队飞行与跟踪控制技术、战场智能决策技术和目标打击效能评估技术等。目前鲜有文章全面覆盖总结这些关键技术,本文围绕这些技术,简要介绍其原理并总结了国内外的主要研究成果,最后在此基础上对今后值得研究的重要问题和发展方向进行了展望。
1 协同态势感知与评估
有人机/无人机协同编队态势感知与评估是协同作战非常重要的阶段。大致过程是有人机通过接收无人机上传感器传来的外部战场信息,分析战场环境所处状态以及估计可能的发展趋势,评估完成后,有人机进行决策并将决策结果传送给无人机。
1.1 战场态势感知与评估
目前,关于有人机/无人机协同作战态势感知与评估并无一个完善的理论方法与体系框架,一些学者进行了初步探索,获取了一定的成果。Endsley在文献[1]中提出了询问式的态势感知方法和全局评估技术,探讨了基于不同情境下个人和环境因素对感知和决策结果的影响。文献[2]设计了通用作战态势图来显示战场综合态势,辅助飞行指挥员进行战场态势感知与评估、战术决策等任务。胡杰[3]等人提出基于变精度粗糙集的态势评估算法,来解决机载传感器或其他信息系统获得的目标属性数据可能存在噪声或某种程度的不完整性的问题。
1.2 目标信息感知
协同感知另一方面是对目标信息的感知,包括目标的种类、数量、当前及未来的位置和运动信息等。快速准确探测作战环境是协同作战任务成功的关键,而协同数据融合是实现协同感知的核心。由于单架战机对目标信息的感知是不完整和不精准的,每架有人机/无人机上均需要携带多个或多类传感器,这就产生了大量的高维的冗余数据。因此,混合编队协同作战要求分布式多层次的数据融合:首先初步融合单架载机上的传感器数据;然后多机成一级子网络,纵向和横向融合不同无人机上的传感器输出数据;最后融合有人机/无人机协同综合体和作战指挥系统提供的信息。这使得不同传感器性能可以优势互补,提高探测性能及探测信息的可信度、系统的容错能力和抗干扰能力增强。
1.3 数据信息融合算法
在数据融合研究领域,信息融合算法[4]主要有聚类分析法(Cluster)、卡尔曼滤波法(Kalman Filter)、人工神经网络(Artificial Neural Network)和模糊推理规则(Fuzzy Inferring)等。文献[5]提出了采用最小二乘法的信息数据特征级融合方法,解决了无人机多传感器从局域传感器阵列到融合节点的传输数据量过大的问题。文献[6]提出一种基于递阶融合估计结构的分布式无色信息滤波算法。
数据融合算法虽然在国内外已形成规范的理论形式,并在实际系统中获得了一些应用,但是现有的融合技术主要针对单一载体上的多传感器,或者是由同类型的静止/低速运动的传感器构成的无线传感器网络,多载体(比如有人机/无人机航空综合体)多类型传感器信息融合问题还没有完全成熟的设计方案,还需进一步深入研究。
2 协同任务分配
2.1 混合编队任务分配原则
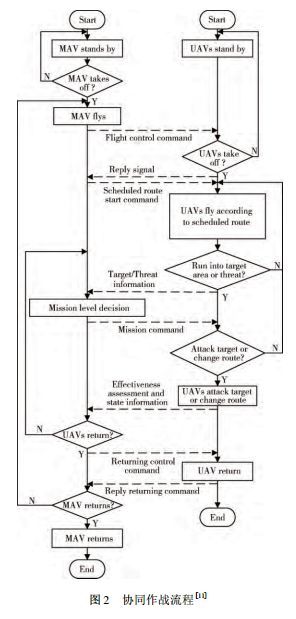
有人机与无人机组成系统协同作战可以相互取长补短,利用各自优势充分发挥二者最大的综合作战效能。无人机机动性强,可以长时间远距离进入危险区域,有人机可以充分发挥核心指挥角色,飞行员甚至不需亲临战场危险区域就可以通过无人机上的远程探测设备全面感知战场态势,并指挥无人机进行作战。协同目标分配任务一般由有人机完成,飞行员根据态势评估结果和作战目标以及无人机的状态信息,考虑各项战术和技术指标要求以及满足有人机/无人机装备限制、飞行约束等情况,对无人机分配攻击方向或打击点,进行武器配置和编队配置,武器投放区域设计等。使整个作战编队收益最大,代价最小[7-10]。协同作战中的流程可以参考文献[11]中图2。
2.2 组合优化问题求解
有人/无人机协同目标分配是组合优化问题,属于多参数、多约束的多项式复杂程度的非确定性问题(Nondeterministic Polynomial,NP)。目前NP问题的求解有2种思路:1)精确搜索;2)启发式搜索。穷举法属于前者,后者指在搜索过程中加入一定启发因子,来缩小搜索范围,比如模拟退火、神经网络和遗传算法等[12-13]。另外,一些学者把先进的理论算法应用到目标分配问题中,获得了不错的效果,如Hopfield神经网络、动态网络流、粒子群算法、蚁群算法、拍卖理论、市场调配理论以及合同网算法等。文献[14]采用合同网算法,但只限于单个编队内的多无人机任务分配,未考虑多编队之间协同执行任务的情况。文献[15]中提出了以合同网协议为基本框架,通信结构、信息结构和协同机制三维一体的目标分配模型求解策略。虽然基于扩展合同网协议的分布式目标分配算法计算时间少,时效性好,但是在寻优质量上不如集中式遗传算法。
这些先进的算法计算量较小,在紧迫的动态战场环境中可以实现实时协同目标分配。但是,这些文献多限于单机分配单任务问题,很少涉及基于代数图论和“邻居”思想的建模和设计方法,对任务执行过程中随机出现的新任务处理能力有限。故通过求解网络节点局部优化问题来得到全局优化目标是目前十分具有挑战性的课题。
3 协同航路规划
3.1 航路规划原则
通过协同态势感知,作战编队对目标特性有了清晰全面的认识,有人机需要根据作战任务确定其余无人机的任务、协同编队队形以及协同编队飞行航路等。其中,有人机/无人机协同航路规划是指在满足飞行任务、单机性能以及战场环境等各种约束条件下,在协同任务规划方案基础上规划各机可行有效的协同航路,满足多机在空间和时间上的协调一致关系,使其整体作战效能最优或近似最优。另外,有人机/无人机作战优先级高低、多机协同飞行的规避以及敌方拦截威胁等因素也需作为约束因素考虑。具有高度不确定性和突发性的战场环境下的协同航路规划具有高动态性,要求飞行员能根据感知结果随机应变迅速决策,所以高动态协同航路规划是有人机/无人机协同编队协同作战制胜的关键。
3.2 航路规划关键技术
高动态协同航路规划的本质是实现快速多约束多目标协同优化与协同制导,是为了在满足协同任务规划方案要求下,兼顾各种约束协同设计各战机的航迹。航路规划本身是一个约束条件多且相互耦合的多目标优化与决策问题,需要综合利用运筹学、智能计算以及计算几何等理论,而混合系统协同航路规划问题更加复杂,十分具有挑战性。
国内外学者在航路规划上已作了大量的研究工作,获得了一些研究成果。文献[16]把三维最优路径设计问题转换成求解水平和垂直方向的路径规划问题。文献[17]介绍了一种新的D*算法,在不断知识学习中能够实时动态规划路径,持续修正当前路径并规划新路径。马向玲等[18]采用A*算法和线性权值自适应方法生成航迹路线,使包含危险和航路长度的代价函数最小。D*优化算法[19]应用图论理论持续修正路径并生成一条新的优化路径,可以实现动态规划。文献[20]中,Kambara提出了一种根据用户的需要尽可能多通过指定区域的路径规划方法,使用了Voronoi图中的邻居节点构造Delaunay图,并在子图上使用A*方法进行最短路径搜索。韩昕锋等[21]提出了一种基于扩展Voronoi图模型和协同进化算法的多无人机协同航路规划方法,降低了以往航路规划问题的求解难度。
虽然已有许多学者研究过路径规划问题,但从相关文献来看,针对有人机/无人机混合编队的相关研究很少,现有的机器人、单架无人机及同类无人机编队航路规划成果不能直接应用到本文讨论的异类协同编队航路规划问题上。此外,现有文献成果多把战场环境简化处理,或者仅考虑避让敌方火力集中点、有人机/无人机间交互、绕开敌方雷达监测设备和系统总体能耗最小等因素其中之一,没有综合考虑这些因素,导致理论假设和实际环境相差甚远。
4 编队飞行与跟踪控制
4.1 协同编队飞行过程
有人机/无人机混合编队准确快速地协同跟踪是作战成功的基本保障。混合编队中战机接到命令后,同时到达指定区域集结后进行编队,准备好开始协同作战,作战过程中,混合战机系统根据飞行员指令沿设计好的航路轨迹保持特定编队队形,为实时保持编队队形,需要采用跟踪控制技术。战场形式时刻变化,敌方目标也在时刻机动,混合编队也应该根据战术需要时变和机动,这要求编队队形方案在系统可接受时间内迅速做出调整,快速成形并保持指定的编队队形。
4.2 协同编队控制技术
编队控制在机器人控制领域已取得丰硕成果,目前应用到无人机编队控制上的是以下几种思想。
1)Behavior Based编队控制
Behavior Based编队控制方法是分布式的,在多机编队飞行中,每架飞机子系统有4种控制行为[22-24]:避免碰撞、回避障碍物、获取目标以及保持队形。根据所有子系统行为响应控制的加权平均值来指挥编队中各架飞机采取的行为响应方式。它的优点是适应性强,而且编队中无人机不会发生碰撞;缺点是设计子系统的行为较为困难。
2)Leader-follower Based编队控制
Leader-follower Based编队控制目前在多无人机编队中很常用,方法是将某架无人机指定为Leader,编队中的其它无人机为Followers。Leader根据航路规划结果按预定轨迹飞行,Followers按一定的控制策略跟随Leader的航向速度、航向角和高度飞行,从而达到协同编队的目的。
Leader-follower Based编队法直观易懂,但缺点是一旦Leader出现问题,编队将不能正常执行。为了解决这个问题,很多学者采用鲁棒控制、极值搜索、自抗扰控制和自适应控制等方法[25-26],取得较好效果,但同时也存在受到干扰后所有战机的位置需重新计算,对机载计算机的要求很高。
3)Virtual StructureBased编队控制
Virtual StructureBased编队控制是集中式的控制方法,首先由LewisM A[27]提出,编队中无实体Leader战机,它将队形看作一个虚拟的刚体结构,每架战机看成是虚拟结构上相对位置固定的点,设定一个虚拟几何中心,当队形移动时,每个成员参照这一虚拟几何中心运动。虚拟领航法可以避免Leader-follower Based编队控制的干扰问题,控制精度较高[28-30]。但是该方法是集中式的控制方法,可靠性较差,合成虚拟Leader需要以高通信质量和高计算能力为代价。
4)其他控制策略
上面3种编队控制方法目前应用最多,各有优缺点。Behavior Based编队控制方法可以同时兼顾队形保持、避开障碍和获取目标等行为模式,但是行为难以定义,实现复杂。Leader-follower Based的编队控制方法简单易于实现,但抗干扰性差,Leader对整个编队影响重大,一旦失效编队就散了。Virtual Structure Based的编队控制方法抗干扰性较好,编队精度高,但是采用集中式结构不利于结构拓展,且通信量和计算量过大。
近年,采用分布式结构的基于一致性策略[31-32]的编队控制方法引起了学者的重视。这种方法仅使用邻居的相对信息,编队中可以没有明确的中心节点,通过对编队收敛的时间进行指定可以满足编队快速收敛性的要求。整个编队按照指定的航迹飞行,本质是混合系统在编队的同时实现对航迹的强一致跟踪。朱旭在文献[33-34]中提出了基于一致性的三维编队控制策略,以预定速度和航线作为参考状态,控制精度比较高,抑制了测量误差、协同误差和通信延迟。除了上述编队控制方法之外,Shin J在文献[35]中基于模型预测控制技术设计了Leader-follower based编队控制策略,采用分布式通信结构提升了通信效率,而且文中方法实现了有效避障。段海滨在文献[36]中针对非线性系统提出了一种非线性双模滚动时域控制方法进行无人机编队控制,并采用粒子群优化方法求解得到所有飞行器的控制输入。田八林[37]采用了补偿模糊神经网络控制方法,实现编队飞行中速度控制、队形结构保持和避开障碍物
5 结论与展望
有人机/无人机混合编队协同空战具有极大的作战潜力和应用前景。虽然国内外学者在此领域中开展了一些研究工作,取得了一些成果,但仍需深入研究。混合编队协同作战未来的研究方向可以考虑以下几个方面。
1)协同任务分配方面
多约束条件下网络化任务规划建模研究:针对具有多约束、多目标的有人机/无人机混合编队,基于代数图论和分布式思想进行网络化任务规划系统建模与设计,进而通过各个网络节点局部优化问题的求解得到全局优化目标。
考虑任务优先权的影响:目标是实现预先任务分配和执行过程中动态任务分配,保证动态环境下编队整体分配效能较优。
多机多任务分配和动态环境下编队整体分配优化问题,提高预先任务分配和执行过程中动态任务的分配能力,提高任务执行过程中随机出现的新任务的处理能力。
2)协同态势感知与数据融合方面
提升战场态势感知与鉴别能力,提升对战场对方制造假象的识别能力。提高快速获取和全面综合环境大数据的能力,包括地形地理数据、专家知识经验和武器装备特性数据等。
有人机/无人机多层次感知建模研究:单机作为节点建立感知网络,包括单点态势感知与数据融合、无人机层次以及有人机/无人机层次态势感知与数据融合。
目标特征认知和分类、威胁等级建模和协同评估等理论研究。
3)多机协同航路规划方面
考虑空战环境中不同威胁程度的潜在目标,依据威胁程度进行航路优化设计,使暴露自身可能性最小,攻击效能最大。
基于协同制导原理的航路生成方法研究:根据优化结果和各机资源配置情况,生成优化后的编队飞行航迹及各机的飞行航迹。
4)编队飞行与跟踪控制方面
不同用途、不同类型的无人机协同组合,发挥各自优势,不局限于战斗机,还可以是侦察机、空中预警机、电子干扰机/对抗机和空中加油机等。大部分编队控制研究均采用简化的运动模型或把三维问题转换为2个二维平面的思路,不适用于空间大机动的协同运动,所以应研究适用于三维运动模型的编队控制律。战场态势瞬息万变,对协同编队有收敛时间限制,有必要研究有收敛时间限制和拓扑变化情况下的协同编队飞行控制与一致跟踪的方法。
总之,混合编队协同作战是复杂的过程,需要综合应用大量先进技术,要达到在战场实际应用还需要大量的理论研究和工程实践。
本文摘自《航天控制》,2017(3):90-96