android 自定义地图 路线规划 自定义marker
最近接到了一个新需求 计划做路线导航提示 由于个性化程度很高 与元地图差异较大 我选择了自定义地图和路线规划相机和的方式
先看效果图
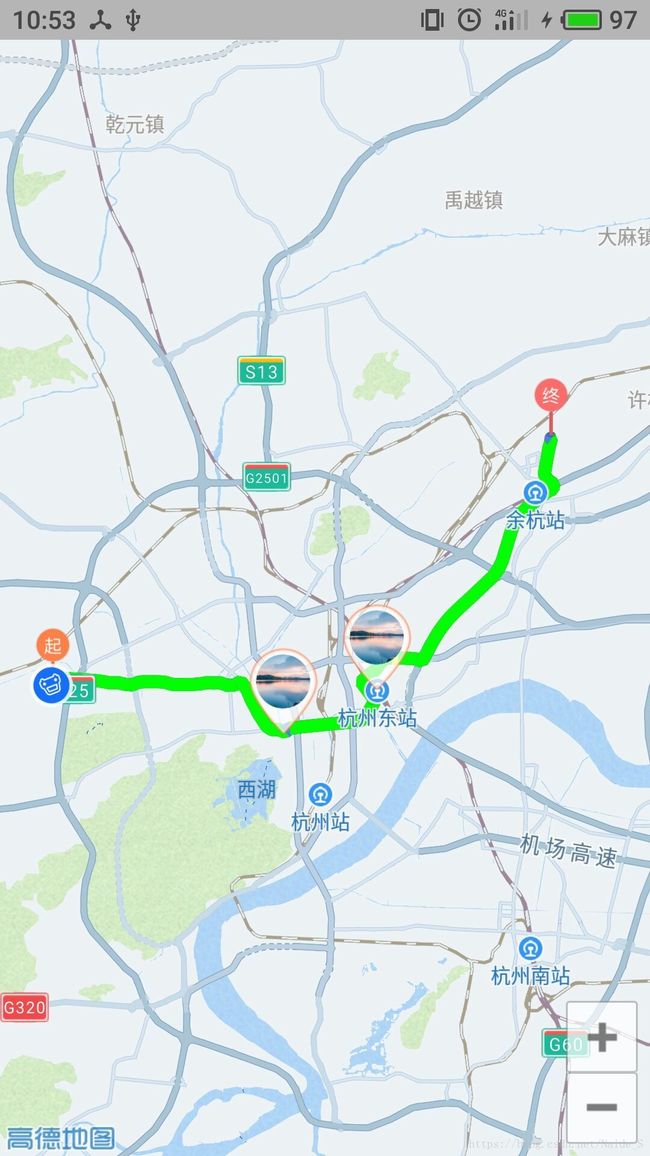
首先要点 基本地图显示 定位蓝点 路线规划 自定义路线规划图层(高德已开源) 自定义marker 测距等 功能部分官方网的文档并不是很清晰 我在这里整理一下 我所用的流程
第一 先配置高德环境 自己去高德官网看 按文档来就可以了
第二 初始化地图
map_view = (MapView) findViewById(R.id.map_view);
map_view.onCreate(savedInstanceState);
if (map_view!=null){
aMap = map_view.getMap();
}
设置定位蓝点
MyLocationStyle myLocationStyle;
myLocationStyle = new MyLocationStyle();//初始化定位蓝点样式类myLocationStyle.myLocationType(MyLocationStyle.LOCATION_TYPE_LOCATION_ROTATE);//连续定位、且将视角移动到地图中心点,定位点依照设备方向旋转,并且会跟随设备移动。(1秒1次定位)如果不设置myLocationType,默认也会执行此种模式。
myLocationStyle.interval(2000); //设置连续定位模式下的定位间隔,只在连续定位模式下生效,单次定位模式下不会生效。单位为毫秒。
aMap.getUiSettings().setMyLocationButtonEnabled(false);//设置默认定位按钮是否显示,非必需设置。
aMap.setMyLocationEnabled(true);// 设置为true表示启动显示定位蓝点,false表示隐藏定位蓝点并不进行定位,默认是false。
// myLocationStyle.myLocationType(MyLocationStyle.LOCATION_TYPE_LOCATION_ROTATE);//连续定位、且将视角移动到地图中心点,定位点依照设备方向旋转,并且会跟随设备移动。(1秒1次定位)默认执行此种模式。
myLocationStyle.myLocationType(MyLocationStyle.LOCATION_TYPE_LOCATION_ROTATE_NO_CENTER);//连续定位、蓝点不会移动到地图中心点,定位点依照设备方向旋转,并且蓝点会跟随设备移动。
myLocationStyle.myLocationIcon(BitmapDescriptorFactory.fromResource(R.mipmap.map_ownerlocation_img));
myLocationStyle.showMyLocation(true);aMap.setMyLocationStyle(myLocationStyle);//设置定位蓝点的Style aMap.setMapType(AMap.MAP_TYPE_NAVI);
模拟地点 并规划路线
////////////////////路线规划////////////////////// start = new LatLonPoint(30.291779,120.040998); end = new LatLonPoint(30.406169,120.305117); final LatLonPoint way1 = new LatLonPoint(30.270999,120.163277); final LatLonPoint way2 = new LatLonPoint(30.291124,120.212892); wayPointList.add(way1); wayPointList.add(way2); routeSearch = new RouteSearch(this); routeSearch.setRouteSearchListener(this); // fromAndTo包含路径规划的起点和终点,drivingMode表示驾车模式 // 第三个参数表示途经点(最多支持16个),第四个参数表示避让区域(最多支持32个),第五个参数表示避让道路 RouteSearch.FromAndTo fromAndTo = new RouteSearch.FromAndTo(start, end); RouteSearch.DriveRouteQuery query = new RouteSearch.DriveRouteQuery(fromAndTo, RouteSearch.DrivingDefault,wayPointList, null, “”);
routeSearch.calculateDriveRouteAsyn(query);//////////////////当前位置监听////////////////// aMap.setOnMyLocationChangeListener(new AMap.OnMyLocationChangeListener() { @Override public void onMyLocationChange(Location location) { } })
;
自定义路线规划图层 高德sdk 5.0版本以后 就不在提供overlay包 但是官方demo 中会有overlay 包 如有需要你可以直接过去拷贝 有一些小地方需要修改 注意下
@Override
public void onDriveRouteSearched(DriveRouteResult driveRouteResult, int i) {
if (i==1000){// 路线规划成功
if (driveRouteResult!=null&&driveRouteResult.getPaths()!=null&&driveRouteResult.getPaths().size()>0){
DrivePath drivePath = driveRouteResult.getPaths().get(0);
aMap.clear();// 清理地图上的所有覆盖物
// 定义图层
DrivingRouteOverlay drivingRouteOverlay = new DrivingRouteOverlay(MapActivity.this, aMap, drivePath,
driveRouteResult.getStartPos(),
driveRouteResult.getTargetPos(),wayPointList);
drivingRouteOverlay.setNodeIconVisibility(false);//隐藏转弯的节点
drivingRouteOverlay.addToMap();
drivingRouteOverlay.zoomToSpan();
aMap.animateCamera(CameraUpdateFactory.newLatLngBounds(new
LatLngBounds(
new LatLng(start.getLatitude(),start.getLongitude()),
new LatLng(end.getLatitude(),end.getLongitude())),50));} }else {// 路线规划失败 Toast.makeText(MapActivity.this, "无可用路线", Toast.LENGTH_SHORT).show(); } }
自定义图层类
import java.util.ArrayList; import java.util.List;
import android.content.Context; import android.graphics.Bitmap; import
android.graphics.BitmapFactory; import android.graphics.Color; import
android.graphics.drawable.Drawable; import android.os.Parcel; import
android.util.Log; import android.view.LayoutInflater; import
android.view.View; import android.widget.LinearLayout;import com.amap.api.maps.AMap; import
com.amap.api.maps.model.BitmapDescriptor; import
com.amap.api.maps.model.BitmapDescriptorFactory; import
com.amap.api.maps.model.LatLng; import
com.amap.api.maps.model.LatLngBounds; import
com.amap.api.maps.model.Marker; import
com.amap.api.maps.model.MarkerOptions; import
com.amap.api.maps.model.PolylineOptions; import
com.amap.api.services.core.LatLonPoint; import
com.amap.api.services.route.DrivePath; import
com.amap.api.services.route.DriveStep; import
com.amap.api.services.route.TMC; import com.free_ride.yiwei.R; import
com.free_ride.yiwei.mvputils.HttpUtils; import
com.free_ride.yiwei.personal.AppManager; import
com.free_ride.yiwei.pinchexin.MapActivity; import
com.free_ride.yiwei.utils.InternetAddressUtis; import
com.free_ride.yiwei.views.RoundImageView; import
com.squareup.picasso.Picasso;import org.xutils.common.Callback; import org.xutils.x;
/* 导航路线图层类。 */
public class DrivingRouteOverlay extends RouteOverlay{
private DrivePath drivePath;
private List throughPointList;
private List throughPointMarkerList = new ArrayList();
private boolean throughPointMarkerVisible = true;
private List tmcs;
private PolylineOptions mPolylineOptions;
private PolylineOptions mPolylineOptionscolor;
private Context mContext;
private boolean isColorfulline = true;
private float mWidth = 25;
private List mLatLngsOfPath;private ArrayListiconList = new ArrayList(); public void setIsColorfulline(boolean iscolorfulline) {
this.isColorfulline = iscolorfulline; }/**
* 根据给定的参数,构造一个导航路线图层类对象。
*
* @param amap 地图对象。
* @param path 导航路线规划方案。
* @param context 当前的activity对象。
*/
public DrivingRouteOverlay(Context context, AMap amap, DrivePath path,
LatLonPoint start, LatLonPoint end, List throughPointList) {
super(context);
mContext = context;
mAMap = amap;
this.drivePath = path;
startPoint = toLatLon(start);
endPoint = toLatLon(end);
this.throughPointList = throughPointList;
}public float getRouteWidth() { return mWidth; } /** * 设置路线宽度 * * @param mWidth 路线宽度,取值范围:大于0 */ public void setRouteWidth(float mWidth) { this.mWidth = mWidth; } /** * 添加驾车路线添加到地图上显示。 */ public void addToMap() { initPolylineOptions(); try { if (mAMap == null) { return; } if (mWidth == 0 || drivePath == null) { return; } mLatLngsOfPath = new ArrayList(); tmcs = new ArrayList (); List drivePaths = drivePath.getSteps(); mPolylineOptions.add(startPoint); for (DriveStep step : drivePaths) { List latlonPoints = step.getPolyline(); List tmclist = step.getTMCs(); tmcs.addAll(tmclist); addDrivingStationMarkers(step, convertToLatLng(latlonPoints.get(0))); for (LatLonPoint latlonpoint : latlonPoints) { mPolylineOptions.add(convertToLatLng(latlonpoint)); mLatLngsOfPath.add(convertToLatLng(latlonpoint)); } } mPolylineOptions.add(endPoint); if (startMarker != null) { startMarker.remove(); startMarker = null; } if (endMarker != null) { endMarker.remove(); endMarker = null; } addStartAndEndMarker(); addThroughPointMarker(); if (isColorfulline && tmcs.size()>0 ) { colorWayUpdate(tmcs); showcolorPolyline(); }else { showPolyline(); } } catch (Throwable e) { e.printStackTrace(); } } /**
* 初始化线段属性
*/
private void initPolylineOptions() {
mPolylineOptions = null;
mPolylineOptions = new PolylineOptions();
mPolylineOptions.color(getDriveColor()).width(getRouteWidth());
}private void showPolyline() { addPolyLine(mPolylineOptions); } private void showcolorPolyline() { addPolyLine(mPolylineOptionscolor); } /** * 根据不同的路段拥堵情况展示不同的颜色 * * @param tmcSection */ private void colorWayUpdate(ListtmcSection) { if (mAMap == null) { return; } if (tmcSection == null || tmcSection.size() <= 0) { return; } TMC segmentTrafficStatus; mPolylineOptionscolor = null; mPolylineOptionscolor = new PolylineOptions(); mPolylineOptionscolor.width(getRouteWidth()); List colorList = new ArrayList (); mPolylineOptionscolor.add(startPoint); mPolylineOptionscolor.add(toLatLon(tmcSection.get(0).getPolyline().get(0))); colorList.add(getDriveColor()); for (int i = 0; i < tmcSection.size(); i++) { segmentTrafficStatus = tmcSection.get(i); int color = getcolor(segmentTrafficStatus.getStatus()); List mployline = segmentTrafficStatus.getPolyline(); for (int j = 1; j < mployline.size(); j++) {
mPolylineOptionscolor.add(toLatLon(mployline.get(j)));
colorList.add(color); } }
mPolylineOptionscolor.add(endPoint);
colorList.add(getDriveColor());
mPolylineOptionscolor.colorValues(colorList);
}private int getcolor(String status) { if (status.equals("畅通")) { return Color.GREEN; } else if (status.equals("缓行")) { return Color.YELLOW; } else if (status.equals("拥堵")) { return Color.RED; } else if (status.equals("严重拥堵")) { returnColor.parseColor(“#990033”); } else { return
Color.parseColor(“#537edc”); } }public LatLng convertToLatLng(LatLonPoint point) {
return new LatLng(point.getLatitude(),point.getLongitude()); }/** * @param driveStep * @param latLng */ private void addDrivingStationMarkers(DriveStep driveStep, LatLng latLng) { addStationMarker(new MarkerOptions() .position(latLng) .title("\u65B9\u5411:" + driveStep.getAction() + "\n\u9053\u8DEF:" + driveStep.getRoad()) .snippet(driveStep.getInstruction()).visible(nodeIconVisible) .anchor(0.5f, 0.5f).icon(getDriveBitmapDescriptor())); } @Override protected LatLngBounds getLatLngBounds() { LatLngBounds.Builder b = LatLngBounds.builder(); b.include(new LatLng(startPoint.latitude, startPoint.longitude)); b.include(new LatLng(endPoint.latitude, endPoint.longitude)); if (this.throughPointList != null && this.throughPointList.size() > 0) { for (int i = 0; i < this.throughPointList.size(); i++) { b.include(new LatLng( this.throughPointList.get(i).getLatitude(), this.throughPointList.get(i).getLongitude())); } } return b.build(); } public void setThroughPointIconVisibility(boolean visible) { try { throughPointMarkerVisible = visible; if (this.throughPointMarkerList != null && this.throughPointMarkerList.size() > 0) { for (int i = 0; i < this.throughPointMarkerList.size(); i++) { this.throughPointMarkerList.get(i).setVisible(visible); } } } catch (Throwable e) { e.printStackTrace(); } } // 添加marker private void addThroughPointMarker() { if (this.throughPointList != null && this.throughPointList.size() > 0) { LatLonPoint latLonPoint = null; iconList.add(BitmapDescriptorFactory.fromResource(R.mipmap.map_end_img)); for (int i = 0; i < this.throughPointList.size(); i++) { latLonPoint = this.throughPointList.get(i); if (latLonPoint != null) { throughPointMarkerList.add(mAMap.addMarker(initMarkerObject(latLonPoint,i))); } } } } // 初始化marker 自定义marker 样式 下main会给出map_custom_marker_img xml 文件 private MarkerOptions initMarkerObject(LatLonPoint latLonPoint, int i) { View inflate = LayoutInflater.from(AppManager.getAppManager().currentActivity()).inflate(R.layout.map_custom_marker_img,null);
RoundImageView roundImg = (RoundImageView) inflate.findViewById(R.id.map_custom_marker);
roundImg.setImageBitmap(BitmapFactory.decodeResource(AppManager.getAppManager().currentActivity().getResources(),R.mipmap.map_passheand_one));
MarkerOptions options = null;if (i%2==0){ options = new MarkerOptions(); options.position(new LatLng(latLonPoint.getLatitude(),latLonPoint.getLongitude())) .visible(throughPointMarkerVisible) .icon(BitmapDescriptorFactory.fromBitmap(convertViewToBitmap(inflate))) .autoOverturnInfoWindow(true) .title("距离"+(i+1)+"还有"+(calculateDistance(this.startPoint,newLatLng(throughPointList.get(i).getLatitude(),throughPointList.get(i).getLongitude())))+”米”);
}else {options = new MarkerOptions(); options.position(new LatLng(latLonPoint.getLatitude(),latLonPoint.getLongitude())) .visible(throughPointMarkerVisible) .icon(BitmapDescriptorFactory.fromBitmap(convertViewToBitmap(inflate))) .autoOverturnInfoWindow(true) .title("距离"+(i+1)+"还有"+(calculateDistance(this.startPoint,newLatLng(throughPointList.get(i).getLatitude(),throughPointList.get(i).getLongitude())))+”米”);
}return options; } /** * view 转为 bitmap 对象 * @param view * @return */ public static Bitmap convertViewToBitmap(View view) { view.destroyDrawingCache(); view.measure(View.MeasureSpec.makeMeasureSpec(0, View.MeasureSpec.UNSPECIFIED), View.MeasureSpec.makeMeasureSpec(0, View.MeasureSpec.UNSPECIFIED)); view.layout(0, 0, view.getMeasuredWidth(), view.getMeasuredHeight()); view.setDrawingCacheEnabled(true); return view.getDrawingCache(true); } private BitmapDescriptor getThroughPointBitDes() { return BitmapDescriptorFactory.fromResource(R.mipmap.pass_head); } /** * 获取两点间距离 * * @param start * @param end * @return */ public static int calculateDistance(LatLng start, LatLng end) { double x1 = start.longitude; double y1 = start.latitude; double x2 = end.longitude; double y2 = end.latitude; return calculateDistance(x1, y1, x2, y2); } public static int calculateDistance(double x1, double y1, double x2, double y2) { final double NF_pi = 0.01745329251994329; // 弧度 PI/180 x1 *= NF_pi; y1 *= NF_pi; x2 *= NF_pi; y2 *= NF_pi; double sinx1 = Math.sin(x1); double siny1 = Math.sin(y1); double cosx1 = Math.cos(x1); double cosy1 = Math.cos(y1); double sinx2 = Math.sin(x2); double siny2 = Math.sin(y2); double cosx2 = Math.cos(x2); double cosy2 = Math.cos(y2); double[] v1 = new double[3]; v1[0] = cosy1 * cosx1 - cosy2 * cosx2; v1[1] = cosy1 * sinx1 - cosy2 * sinx2; v1[2] = siny1 - siny2; double dist = Math.sqrt(v1[0] * v1[0] + v1[1] * v1[1] + v1[2] * v1[2]); return (int) (Math.asin(dist / 2) * 12742001.5798544); } //获取指定两点之间固定距离点 public static LatLng getPointForDis(LatLng sPt, LatLng ePt, double dis) { double lSegLength = calculateDistance(sPt, ePt); double preResult = dis / lSegLength; return new LatLng((ePt.latitude - sPt.latitude) * preResult + sPt.latitude, (ePt.longitude - sPt.longitude) * preResult +sPt.longitude);
}
/**
* 去掉DriveLineOverlay上的线段和标记。
*/
@Override
public void removeFromMap() {
try {
super.removeFromMap();
if (this.throughPointMarkerList != null
&& this.throughPointMarkerList.size() > 0) {
for (int i = 0; i < this.throughPointMarkerList.size(); i++) {
this.throughPointMarkerList.get(i).remove();
}
this.throughPointMarkerList.clear();
}
} catch (Throwable e) {
e.printStackTrace();
}
}/** * 把LatLonPoint对象转化为LatLon对象 */ public static LatLng toLatLon(LatLonPoint lonPoint){ return new LatLng(lonPoint.getLatitude(),lonPoint.getLongitude()); } }我的需求是水滴型内嵌套圆形头像的marker
map_custom_marker_img 文件