UWB 定位_三边定位位置解析算法-C
一、用途
1、解析未知点的坐标。
二、、基本原理
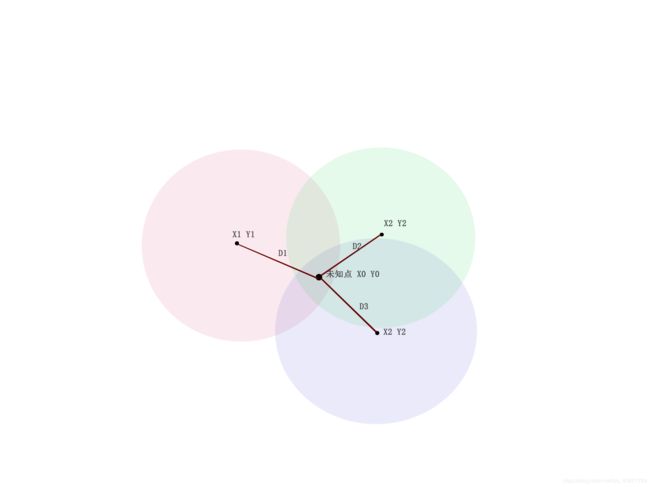
已知三点位置 (x1, y1), (x2, y2), (x3, y3)
已知未知点 (x0, y0) 到三点距离 d1, d2, d3
通过最小二乘法算法来解析出坐标。
三、代码
该代码是需要输入四个基站坐标和四个基站到未知点的距离的, 如果需要改成三个 直接引用 trilateration(AX, AY, d1, BX, BY, d2, CX, CY, d3);即可。4个基站只是在三个基站的基础上来解析的,多了一步对4种不同的三个基站的定位位置数据平均化。
.h文件代码:
#ifndef __MY_LOCATION_H
#define __MY_LOCATION_H
static int AX,BX,CX,DX,AY,BY,CY,DY;
void MY_location_Init(int X1, int Y1, int X2, int Y2, int X3, int Y3,int X4,int Y4);
double* trilateration(double x1, double y1, double d1, double x2, double y2, double d2, double x3, double y3, double d3);
double* Printf(double d1, double d2, double d3, double d4);
int P(int x, int n);
#endif
.c文件代码
#include"MY_Location.h"
/*
??:?x?y??
*/
int P(int x, int n)
{
int val = 1;
while (n--)
val *= x;
return val;
}
void MY_location_Init(int X1, int Y1, int X2, int Y2, int X3, int Y3,int X4,int Y4)
{AX=X1; AY=Y1; BX=X2;BY=Y2; CX=X3; CY=Y3 ;DX=X4,DY=Y4;}
/*
??:??????????
???????
*/
double* trilateration(double x1, double y1, double d1, double x2, double y2, double d2, double x3, double y3, double d3)
{
static double d[4] = { 0.0,0.0 };
double a11 = 2 * (x1 - x3);
double a12 = 2 * (y1 - y3);
double b1 = P(x1, 2) - P(x3, 2) + P(y1, 2) - P(y3, 2) + P(d3, 2) - P(d1, 2);
double a21 = 2 * (x2 - x3);
double a22 = 2 * (y2 - y3);
double b2 = P(x2, 2) - P(x3, 2) + P(y2, 2) - P(y3, 2) + P(d3, 2) - P(d2, 2);
d[0] = (b1 * a22 - a12 * b2) / (a11 * a22 - a12 * a21);
d[1] = (a11 * b2 - b1 * a21) / (a11 * a22 - a12 * a21);
return d;
}
double *Printf(double d1, double d2, double d3, double d4)
{
double *Coordinate_A = 0, *Coordinate_B = 0, *Coordinate_C = 0, *Coordinate_D = 0;
static double XY[2] = { 0,0 };
Coordinate_A = trilateration(AX, AY, d1, BX, BY, d2, CX, CY, d3);
Coordinate_B = trilateration(AX, AY, d1, BX, BY, d2, DX, DY, d4);
Coordinate_C = trilateration(AX, AY, d1, CX, CY, d3, DX, DY, d4);
Coordinate_D = trilateration(BX, BY, d2, CX, CY, d3,DX, DY, d4);
XY[0] = (Coordinate_A[0] + Coordinate_B[0] + Coordinate_C[0] + Coordinate_D[0]) / 4;
XY[1] = (Coordinate_A[1] + Coordinate_B[1] + Coordinate_C[1] + Coordinate_D[1]) / 4;
return XY;
}
调用的时候 需要先在MY_location_Init(int X1, int Y1, int X2, int Y2, int X3, int Y3,int X4,int Y4);中输入基站的位置坐标
*可以直接复制到Stm32的代码中使用。
四、调用
代码:初始化基站坐标
MY_location_Init(0, 0,600, 0, 0,600,600,600);//初始化基站坐标
coordinate= Printf(D1,D2,D3,D4);//输入基站分别到未知点的坐标
printf("X%dY%d",(int)coordinate[0],(int)coordinate[1]);//输出格式