【技术向】目标跟踪UAV123数据集下载及使用指南
文章目录
- 1. 下载
- 2.使用指南
- 2.1 主要文件
- 2.2 预处理
- 2.3 跑库与评测
- 2.3.1 跑库
- 2.3.2 评测
- 2.3.3 注意事项
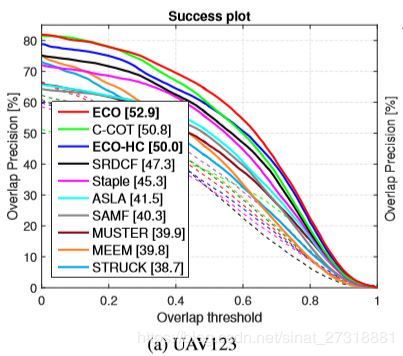
今天推一篇普及性文章,大家知道目标跟踪常用数据集有OTB和VOT系列,现在还有更大的数据集LASOT和TrackingNet出现,此外有一个叫做UAV123的数据集,是一个专门场景的数据集,都是用无人机拍摄,特点是背景干净,视角变化较多,包含123个视频,总大小在13.5G左右。一些知名的跟踪算法会使用UAV进行评测,比如ECO等。可以查看UAV论文看看详细介绍? UAV123论文ECCV16。本文将提供该数据集的下载及使用方法,自跑自评,不用其他工具。有问题欢迎讨论~
1. 下载
下载渠道1:?UAV123数据集主页
下载渠道2:?百度网盘,提取码:7lwk。其中包含5个压缩包,一起解压就行。
2.使用指南
2.1 主要文件
anno文件夹包含UAV20L和UAV123的groundtruth标注,格式为左上角坐标和长宽四个值一行/帧,我们一般使用的是UAV123,其中子文件夹att包含每个视频的属性标注,具体可以查看主目录下的DatasetAnnotation.pdf文件;
第二个是data_seq文件夹,包含数据集的所有图片文件命名方式为06i.jpg;
还有一个configSeqs.m文件,是模仿OTB工具的视频信息文件,后面我们将使用它进行简单的跑库。
2.2 预处理
写了一个utils_UAV.m文件,里面有一些实用的程序,可以在网盘中下载。
我们的目标是做成OTB数据集那样的格式便于跑库,每个视频还缺一个frame文件,即指定起始帧和终止帧的文件,可以通过configSeqs.m生成,首先在主目录新建frame文件夹,然后运行下面程序。
%% achieve frame files like OTB
base_path = '主目录/anno/UAV123/';
seqs = configSeqs;
for i = 1:numel(seqs)
frame_name = [seqs{i}.name '_frames.txt'];
file_name = ['./frame/' frame_name];
fid = fopen(file_name, 'wt');
fprintf(fid, '%d,%d\n',seqs{i}.startFrame, seqs{i}.endFrame);
fclose(fid);
end
下面我们打印一下每个视频的名称,便于后面跑库使用
%% print seq names
fid = fopen('seq_names.txt','wt');
for i = 1:numel(seqs)
fprintf(fid, '''%s'',',seqs{i}.name);
end
fclose(fid);
当然你也可以检查一下是不是都是彩色视频
base_path = '主目录/data_seq/UAV123/';
for i = 1:numel(seqs)
img = imread([base_path seqs{i}.name '/' num2str(seqs{i}.startFrame, '%06i.jpg')]);
if size(img,3) == 1
disp([seqs{i}.name]);
end
end
2.3 跑库与评测
2.3.1 跑库
我们以ECO为例,跑ECO-HC跟踪算法,你也可以跑SRDCF算法,设置都一样。你可以下载我用来跑库的ECO的示例?代码
首先在ECO代码文件中,utils文件夹中增加一个类似load_video_info.m的文件用于提取UAV数据集的信息,起名为load_video_info_UAV.m,内容如下
function [seq, ground_truth] = load_video_info_UAV(gt_path, img_path, frame_path, testSet, seqs)
ground_truth = load([gt_path testSet '.txt']);
seq.format = 'otb';
seq.len = size(ground_truth, 1);
seq.init_rect = ground_truth(1,:);
f = fopen([frame_path testSet '_frames.txt']);
frames = textscan(f, '%f,%f');
fclose(f);
img_path = seqs.path;
img_files = num2str((frames{1}:frames{2})', [img_path '%06i.jpg']);
seq.s_frames = cellstr(img_files);
end
然后ECO代码主目录新建一个跑库主函数demo_UAV.m,并把UAV123数据集中的configSeqs.m文件复制进来。demo_UAV.m内容如下
% Add paths
setup_paths();
seqs = configSeqs;
% Load video information
gt_path = 'UAV123主目录/anno/UAV123/';
img_path = 'UAV123主目录/data_seq/UAV123/';
frame_path = 'UAV123主目录/frame/';
UAV123 = {'bike1','bike2','bike3','bird1_1','bird1_2','bird1_3','boat1','boat2','boat3','boat4','boat5','boat6','boat7','boat8','boat9','building1','building2','building3','building4',...
'building5','car1_1','car1_2','car1_3','car2','car3','car4','car5','car6_1','car6_2','car6_3','car6_4','car6_5','car7','car8_1','car8_2','car9','car10','car11','car12','car13',...
'car14','car15','car16_1','car16_2','car17','car18','group1_1','group1_2','group1_3','group1_4','group2_1','group2_2','group2_3','group3_1','group3_2','group3_3','group3_4',...
'person1','person2_1','person2_2','person3','person4_1','person4_2','person5_1','person5_2','person6','person7_1','person7_2','person8_1','person8_2','person9','person10',...
'person11','person12_1','person12_2','person13','person14_1','person14_2','person14_3','person15','person16','person17_1','person17_2','person18','person19_1','person19_2',...
'person19_3','person20','person21','person22','person23','truck1','truck2','truck3','truck4_1','truck4_2','uav1_1','uav1_2','uav1_3','uav2','uav3','uav4','uav5','uav6','uav7',...
'uav8','wakeboard1','wakeboard2','wakeboard3','wakeboard4','wakeboard5','wakeboard6','wakeboard7','wakeboard8','wakeboard9','wakeboard10','car1_s','car2_s','car3_s','car4_s',...
'person1_s','person2_s','person3_s'};
testSet = UAV123;
if ~exist('res', 'dir')
mkdir('res');
end
%% run UAV
for i = 1:length(testSet)
[seq, ground_truth] = load_video_info_UAV(gt_path, img_path, frame_path, testSet{i}, seqs{i});
results = testing_ECO_HC(seq);
results.res = [results.res(:,[2,1]) + (results.res(:,[4,3]) - 1) / 2 , results.res(:,[4,3])];
res = results.res;
save(['./res/' testSet{i} '_UAV.mat'], 'res');
end
2.3.2 评测
注意我们把结果的形式保存成中心坐标和长宽的形式,以便于下面的评测。评测主要指标是AUC和精度,和OTB报告的一样,只不过没有曲线图,想要可以自己加。
评测时把run UAV下面都注释掉,增加评测代码如下
average_center_location_error_sum=0;
distance_precision_sum=0;
PASCAL_precision_sum=0;
Overlap_sum=0;
fps_sum=0;
fid = fopen('results_UAV.txt', 'wt');
for i = 1:length(testSet)
[seq, ground_truth] = load_video_info_UAV(gt_path, img_path, frame_path, testSet{i}, seqs{i});
ground_truth = [ground_truth(:,[2,1]) + (ground_truth(:,[4,3])-1)/2 , ground_truth(:,[4,3])];
results.fps = 0;
load(['./res/' testSet{i} '_UAV.mat'], 'res');
ground_truth2 = [];
positions2 = [];
for j = 1:size(ground_truth,1)
if isnan(ground_truth(j,1))
continue;
else
ground_truth2 = [ground_truth2;ground_truth(j,1:4)];
positions2 = [positions2; res(j,1:4)];
end
end
[distance_precision, PASCAL_precision, average_center_location_error, Overlap] = ...
compute_performance_measures(positions2, ground_truth2, 20, 0.5);
disp([num2str(Overlap) testSet{i}]);
fprintf(fid, '%.5g %%, %s\n', 100*Overlap, testSet{i});
average_center_location_error_sum=average_center_location_error_sum+average_center_location_error;
distance_precision_sum=distance_precision_sum+distance_precision;
PASCAL_precision_sum=PASCAL_precision_sum+PASCAL_precision;
Overlap_sum=Overlap_sum+Overlap;
fps_sum=fps_sum+results.fps;
end
average_center_location_error=average_center_location_error_sum/length(testSet);
distance_precision=distance_precision_sum/length(testSet);
PASCAL_precision=PASCAL_precision_sum/length(testSet);
Overlap=Overlap_sum/length(testSet);
fps=fps_sum/length(testSet);
fprintf('Center Location Error: %.3g pixels\nDistance Precision: %.3g %%\nOverlap Precision: %.5g %%\nOverlap: %.5g%%\nSpeed: %.5g fps\n', ...
average_center_location_error, 100*distance_precision, 100*PASCAL_precision,100*Overlap, fps);
fprintf(fid, '%.5g %%, %s\n', 100*Overlap, 'All');
fclose(fid);
其中compute_performance_measures函数如下
function [distance_precision, PASCAL_precision, average_center_location_error,Overlap] = ...
compute_performance_measures(positions, ground_truth, distance_precision_threshold, PASCAL_threshold)
% [distance_precision, PASCAL_precision, average_center_location_error] = ...
% compute_performance_measures(positions, ground_truth, distance_precision_threshold, PASCAL_threshold)
%
% For the given tracker output positions and ground truth it computes the:
% * Distance Precision at the specified threshold (20 pixels as default if
% omitted)
% * PASCAL Precision at the specified threshold (0.5 as default if omitted)
% * Average Center Location error (CLE).
%
% The tracker positions and ground truth must be Nx4-matrices where N is
% the number of time steps in the tracking. Each row has to be on the form
% [c1, c2, s1, s2] where (c1, c2) is the center coordinate and s1 and s2
% are the size in the first and second dimension respectively (the order of
% x and y does not matter here).
if nargin < 3 || isempty(distance_precision_threshold)
distance_precision_threshold = 20;
end
if nargin < 4 || isempty(PASCAL_threshold)
PASCAL_threshold = 0.5;
end
if size(positions,1) ~= size(ground_truth,1),
disp('Could not calculate precisions, because the number of ground')
disp('truth frames does not match the number of tracked frames.')
return
end
%calculate distances to ground truth over all frames
distances = sqrt((positions(:,1) - ground_truth(:,1)).^2 + ...
(positions(:,2) - ground_truth(:,2)).^2);
distances(isnan(distances)) = [];
%calculate distance precision
distance_precision = nnz(distances < distance_precision_threshold) / numel(distances);
%calculate average center location error (CLE)
average_center_location_error = mean(distances);
%calculate the overlap in each dimension
overlap_height = min(positions(:,1) + positions(:,3)/2, ground_truth(:,1) + ground_truth(:,3)/2) ...
- max(positions(:,1) - positions(:,3)/2, ground_truth(:,1) - ground_truth(:,3)/2);
overlap_width = min(positions(:,2) + positions(:,4)/2, ground_truth(:,2) + ground_truth(:,4)/2) ...
- max(positions(:,2) - positions(:,4)/2, ground_truth(:,2) - ground_truth(:,4)/2);
% if no overlap, set to zero
overlap_height(overlap_height < 0) = 0;
overlap_width(overlap_width < 0) = 0;
% remove NaN values (should not exist any)
valid_ind = ~isnan(overlap_height) & ~isnan(overlap_width);
% calculate area
overlap_area = overlap_height(valid_ind) .* overlap_width(valid_ind);
tracked_area = positions(valid_ind,3) .* positions(valid_ind,4);
ground_truth_area = ground_truth(valid_ind,3) .* ground_truth(valid_ind,4);
% calculate PASCAL overlaps
overlaps = overlap_area ./ (tracked_area + ground_truth_area - overlap_area);
% calculate PASCAL precision
Overlap = mean(overlaps);
PASCAL_precision = nnz(overlaps >= PASCAL_threshold) / numel(overlaps);
end
2.3.3 注意事项
- UAV的视频部分有目标完全离开视野的情况,这种情况的groundtruth标注为NaN,NaN,NaN,NaN,所以在评测时我们先把这部分帧剔除再进行计算;
- 这种自跑自评的方法不限于UAV库,OTB和VOT都适用。