【第一部分】视频学习心得及问题总结
绪论
什么是人工智能?
人工智能是使一个机器像人一样进行感知、认知、决策、执行的人工程序或系统。
图灵测试:假设在一个封闭空间中,完成一个任务,外部人员能否判断出完成这个任务的是机器还是人。
人工智能三个层面:计算智能(能存能算)、感知智能(能听会说,能看会认)、认知智能(能理解,会思考)。
知识工程:
1.基于手工设计规则建立专家系统
2.结果容易解释
3.系统构建费时费力
4.依赖专家主观经验,难以保证一致性和准确性
机器学习
1.基于数据自动学习
2.减少人工复杂工作,但结果可能不易解释
3.提高信息处理的效率,且准确率较高
4.来源于真实数据,减少人工规则主观性,可信度高
机器学习三要素:模型、策略、算法。
模型:对要学习问题映射的假设(问题模型,确定假设空间)
策略:从假设空间中学习、选择最优模型的准则(确定目标函数)
算法:根据目标函数求解最优模型的具体计算方法(求解模型参数)
模型分类:
数据标记(监督学习、无监督学习、半监督学习、强化学习)
数据分布(参数模型,非参数模型)
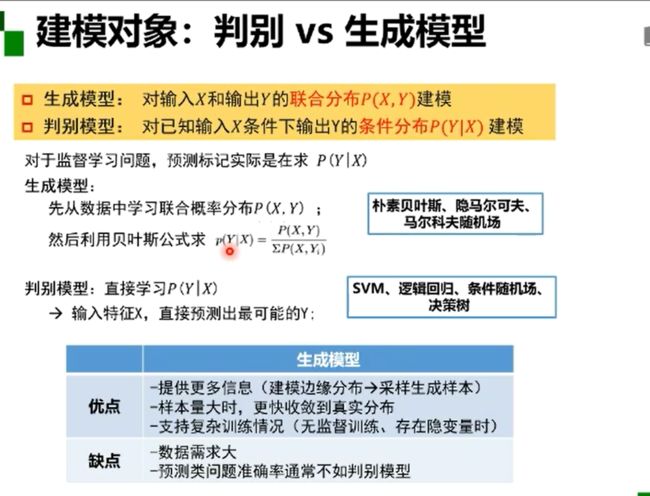
建模对象(判别模型、生成模型)
监督学习模型:输入样本具有标记,从数据中学习标记分界面,适用于预测数据标记

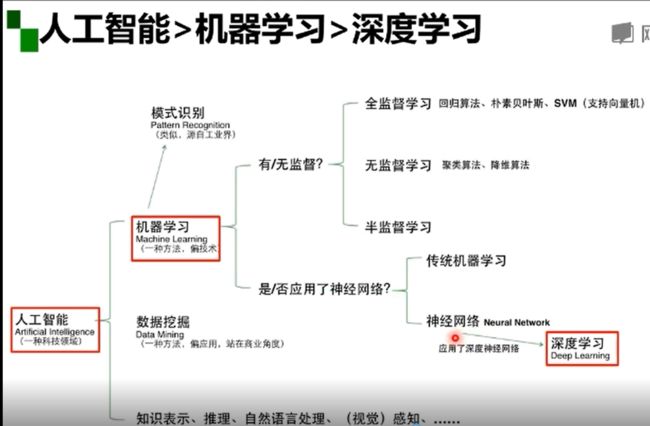
深度学习只是机器学习的一种, 机器学习是实现人工智能的一种手段。
深度学习三个助推剂:数据、算法、计算力
深度学习的“不能”
1.算法不稳定,容易被攻击;
2.模型复杂度高,难以纠错和调试;
3.模型层级复合程度高,参数不透明;
4.端到端训练方式对数据依赖性强,模型增量性差;当样本数据量小的时候,深度学习无法体现强大拟合能力;深度学习可以进行语义标注和关系检测,但无法进一步完成图像描述;
5.专注直观感知类问题,对开放性推理问题无能为力;
6.人类知识无法有效引入进行监督,机器偏见难以避免
浅层神经网络
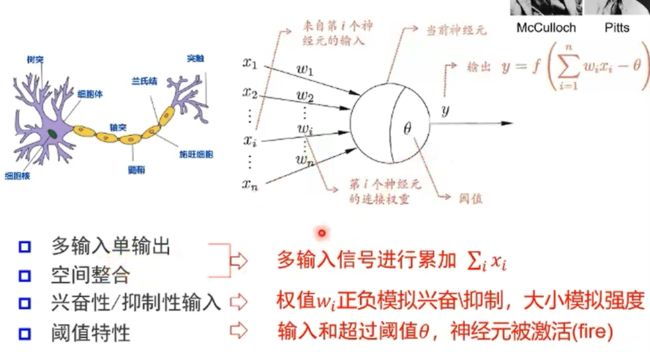
神经元特性:多输入单输出;空间整合和时间整合;兴奋性输入和抑制性输入;阈值特性。
M-P神经元:

激活函数举例:

单层感知器:通过非线性激活函数,可以实现简单的逻辑非、与、或操作(线性问题),但却不可以解决异或问题(非线性问题)。
多层感知器:通过加隐层将一个非线性问题转化为线性问题。
万有逼近定理
如果一个隐层包含足够多的神经元,三层前馈网络(输入-隐层-输出)能任意精度逼近任意预定的连续函数。
利用矩阵的线性变换和激活函数的非线性变换,将原始输入空间投影到线性可分的空间去分类/回归。
双层感知器逼近非连续函数。当隐层足够宽时,双隐层感知器可以逼近任意非连续函数,可解决任何复杂的分类问题。
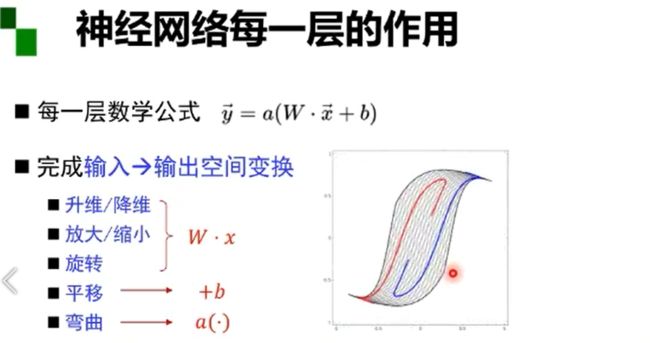
数据训练就是为了让神经网络选择这样一种线性和非线性变换
增加节点:增加维度,即增加线性转换能力
增加层数:增加激活函数的次数,即增加非线性转换次数
在神经元总数相当的情况下,增加网络深度可比增加宽度带来更强的网络表示能力:产生更多地线性区域。深度的贡献是指数增长的,而宽度的贡献是线性的。
神经网络的参数学习:误差法向传播

梯度与梯度下降
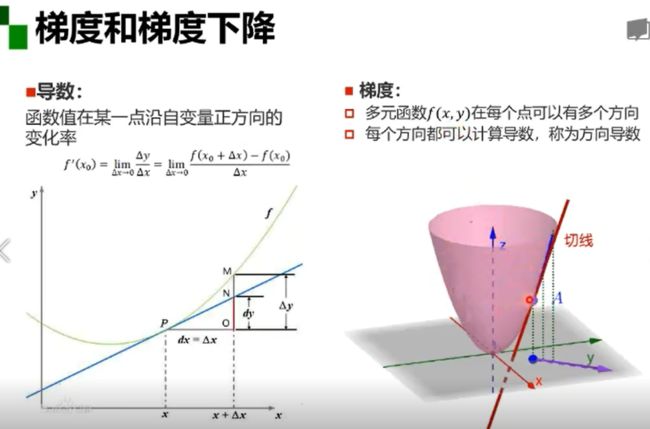
梯度:某一函数在该点处的方向导数沿着该方向取得最大值
梯度下降:是一种无约束优化方法,参数沿着负梯度方向更新可以使函数值下降,可能无法找到全局的极值点,而是找到局部极值点。
梯度消失问题
误差无法传播,参数过小,只更新了最后一层参数,前面的参数没有更新
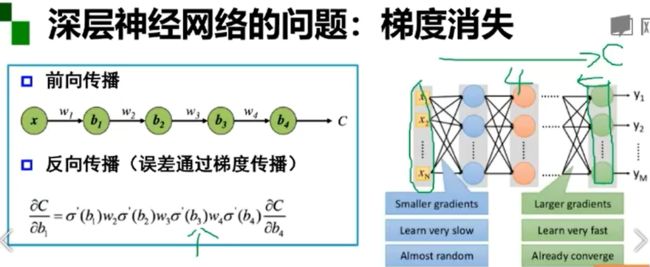
1.当激活函数(sigmoid)落在饱和区的时候,其导数会很小,从而导致整个链式求导的反向传播的值很小,接近于零;从而在反向传播过程中,最后几层网络的训练效果很好,但前面的网络层因为梯度消失原因得不到很好的训练,从而在有新的训练输入后,经过前面的网络层,使得数据混乱,导致最后几层的训练失去效果
2.增加深度会造成梯度消失,误差无法传播
3.多层网络容易陷入局部极值,难以训练
自编码器

受限玻尔兹曼机

自编码器vs受限玻尔兹曼机

【第二部分】代码练习
2.1 图像处理基本练习
1.下载并显示图像
!wget https://raw.githubusercontent.com/summitgao/ImageGallery/master/yeast_colony_array.jpg
import matplotlib import numpy as np import matplotlib.pyplot as plt import skimage from skimage import data from skimage import io #colony = io.imread('yeast_colony_array.jpg') #print(type(colony)) #print(colony.shape)
# Plot all channels of a real image plt.subplot(121) plt.imshow(colony[:,:,:]) plt.title('3-channel image') plt.axis('off') # Plot one channel only plt.subplot(122) plt.imshow(colony[:,:,0]) plt.title('1-channel image') plt.axis('off');
2.读取并改变图像像素值
# Get the pixel value at row 10, column 10 on the 10th row and 20th column camera = data.camera() print(camera[10, 20]) # Set a region to black camera[30:100, 10:100] = 0 plt.imshow(camera, 'gray')
 发现图中camera[30:100, 10:100] = 0的区域改变了颜色
发现图中camera[30:100, 10:100] = 0的区域改变了颜色
# Set the first ten lines to black camera = data.camera() camera[:10] = 0 plt.imshow(camera, 'gray')
 纵坐标为10 的值全部的一行改变了颜色
纵坐标为10 的值全部的一行改变了颜色
# Set to "white" (255) pixels where mask is True camera = data.camera() mask = camera < 80 camera[mask] = 255 plt.imshow(camera, 'gray')
 mask = camera < 80, mask是一个bool数组,维度(512 x 512),与图片像素对应。图片中像素值大于80的位置对应的mask数组的值为False,其余为True。
mask = camera < 80, mask是一个bool数组,维度(512 x 512),与图片像素对应。图片中像素值大于80的位置对应的mask数组的值为False,其余为True。
# Set brighter pixels to red red_cat = cat.copy() reddish = cat[:, :, 0] > 160 red_cat[reddish] = [255, 0, 0] plt.imshow(red_cat)

图片R(RGB)通道的像素值大于160的位置对应的reddish数组的值为True,其余为False,下一句代码将相应位置变为红色。
# Change RGB color to BGR for openCV BGR_cat = cat[:, :, ::-1] plt.imshow(BGR_cat)
 将最后一维数据顺序反转,最后一维的形式是[r,g,b],倒序后即[b,g,r]。
将最后一维数据顺序反转,最后一维的形式是[r,g,b],倒序后即[b,g,r]。
上述两张图片是改变通道的数值来实现对于图像色彩处理。
3.转换图像数据类型
skimage.img_as_float(img)--- [64-float]
skimage.img_as_ubyte(i1. mg)--- [8-unit]
skimage.img_as_uint(img)--- [16-unit]
skimage.img_as_int(img)--- [16-int]
4.绘制图像直方图
img = data.camera() plt.hist(img.ravel(), bins=256, histtype='step', color='black');
 其中ravel使用了降维
其中ravel使用了降维
5.图像分割
# Use colony image for segmentation colony = io.imread('yeast_colony_array.jpg') # Plot histogram img = skimage.color.rgb2gray(colony) plt.hist(img.ravel(), bins=256, histtype='step', color='black');
 skimage.color.rgb2gray(img):RGB图像转灰度图像。
skimage.color.rgb2gray(img):RGB图像转灰度图像。
6.Canny算子用来进行边缘检测
img_edges = canny(img):边缘检测
img_filled = ndi.binary_fill_holes(img_edges):填充二进制图像矩阵中的孔洞。
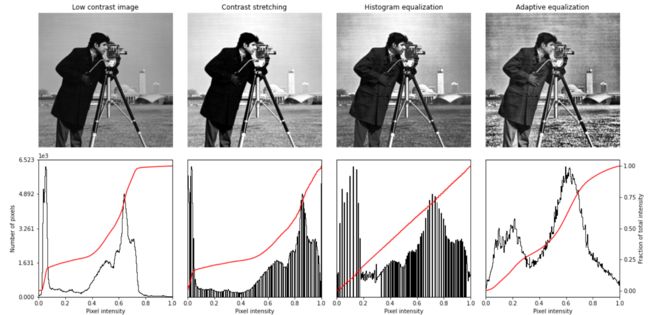
7.改变图像的对比度

# Equalization img_eq = skimage.exposure.equalize_hist(img) plt.imshow(img_eq, 'gray')

# Adaptive Equalization img_adapteq = skimage.exposure.equalize_adapthist(img, clip_limit=0.03) plt.imshow(img_adapteq, 'gray')

# Display results def plot_img_and_hist(img, axes, bins=256): """Plot an image along with its histogram and cumulative histogram. """ img = img_as_float(img) ax_img, ax_hist = axes ax_cdf = ax_hist.twinx() # Display image ax_img.imshow(img, cmap=plt.cm.gray) ax_img.set_axis_off() ax_img.set_adjustable('box') # Display histogram ax_hist.hist(img.ravel(), bins=bins, histtype='step', color='black') ax_hist.ticklabel_format(axis='y', style='scientific', scilimits=(0, 0)) ax_hist.set_xlabel('Pixel intensity') ax_hist.set_xlim(0, 1) ax_hist.set_yticks([]) # Display cumulative distribution img_cdf, bins = skimage.exposure.cumulative_distribution(img, bins) ax_cdf.plot(bins, img_cdf, 'r') ax_cdf.set_yticks([]) return ax_img, ax_hist, ax_cdf
fig = plt.figure(figsize=(16, 8)) axes = np.zeros((2, 4), dtype=np.object) axes[0, 0] = fig.add_subplot(2, 4, 1) for i in range(1, 4): axes[0, i] = fig.add_subplot(2, 4, 1+i, sharex=axes[0,0], sharey=axes[0,0]) for i in range(0, 4): axes[1, i] = fig.add_subplot(2, 4, 5+i) ax_img, ax_hist, ax_cdf = plot_img_and_hist(img, axes[:, 0]) ax_img.set_title('Low contrast image') y_min, y_max = ax_hist.get_ylim() ax_hist.set_ylabel('Number of pixels') ax_hist.set_yticks(np.linspace(0, y_max, 5)) ax_img, ax_hist, ax_cdf = plot_img_and_hist(img_rescale, axes[:, 1]) ax_img.set_title('Contrast stretching') ax_img, ax_hist, ax_cdf = plot_img_and_hist(img_eq, axes[:, 2]) ax_img.set_title('Histogram equalization') ax_img, ax_hist, ax_cdf = plot_img_and_hist(img_adapteq, axes[:, 3]) ax_img.set_title('Adaptive equalization') ax_cdf.set_ylabel('Fraction of total intensity') ax_cdf.set_yticks(np.linspace(0, 1, 5)) fig.tight_layout() plt.show()
2.2 pytorch基础练习
# 可以是一维数组(向量) x = torch.tensor([1,2,3,4,5,6]) print(x)
![]()
# 可以是二维数组(矩阵) x = torch.ones(2,3) print(x)
# 可以是任意维度的数组(张量) x = torch.ones(2,3,4) print(x)

# 创建一个 2x4 的tensor m = torch.Tensor([[2, 5, 3, 7], [4, 2, 1, 9]]) print(m.size(0), m.size(1), m.size(), sep=' -- ')
![]() 表示这个tensor的size 中第一个是2 ,第二个是4
表示这个tensor的size 中第一个是2 ,第二个是4
 此处在开始运行的时候是错误的,原因是m和v一个是float型一个是整形,无法进行运算,于是我在step=1改成了step=1.使得v也变为float型,最终m@v的结果是float型。
此处在开始运行的时候是错误的,原因是m和v一个是float型一个是整形,无法进行运算,于是我在step=1改成了step=1.使得v也变为float型,最终m@v的结果是float型。

两个矩阵进行拼接:
# 创建两个 1x4 的tensor a = torch.Tensor([[1, 2, 3, 4]]) b = torch.Tensor([[5, 6, 7, 8]]) # 在 0 方向拼接 (即在 Y 方各上拼接), 会得到 2x4 的矩阵 print( torch.cat((a,b), 0))

# 在 1 方向拼接 (即在 X 方各上拼接), 会得到 1x8 的矩阵 print( torch.cat((a,b), 1))
![]()
2.3 螺旋数据分类
#数据初始化 import random import torch from torch import nn, optim import math from IPython import display from plot_lib import plot_data, plot_model, set_default # 因为colab是支持GPU的,torch 将在 GPU 上运行 device = torch.device("cuda:0" if torch.cuda.is_available() else "cpu") # 初始化随机数种子。神经网络的参数都是随机初始化的, # 不同的初始化参数往往会导致不同的结果,当得到比较好的结果时我们通常希望这个结果是可以复现的, # 因此,在pytorch中,通过设置随机数种子也可以达到这个目的 seed = 12345 random.seed(seed) torch.manual_seed(seed) N = 1000 # 每类样本的数量 D = 2 # 每个样本的特征维度 C = 3 # 样本的类别 H = 100 # 神经网络里隐层单元的数量 X = torch.zeros(N * C, D).to(device) Y = torch.zeros(N * C, dtype=torch.long).to(device) for c in range(C): index = 0 t = torch.linspace(0, 1, N) # 在[0,1]间均匀的取10000个数,赋给t # 下面的代码不用理解太多,总之是根据公式计算出三类样本(可以构成螺旋形) # torch.randn(N) 是得到 N 个均值为0,方差为 1 的一组随机数,注意要和 rand 区分开 inner_var = torch.linspace( (2*math.pi/C)*c, (2*math.pi/C)*(2+c), N) + torch.randn(N) * 0.2 # 每个样本的(x,y)坐标都保存在 X 里 # Y 里存储的是样本的类别,分别为 [0, 1, 2] for ix in range(N * c, N * (c + 1)): X[ix] = t[index] * torch.FloatTensor((math.sin(inner_var[index]), math.cos(inner_var[index]))) Y[ix] = c index += 1
#创建线性模型 learning_rate = 1e-3 lambda_l2 = 1e-5 # nn 包用来创建线性模型 # 每一个线性模型都包含 weight 和 bias model = nn.Sequential( nn.Linear(D, H), nn.Linear(H, C) ) model.to(device) # 把模型放到GPU上 # nn 包含多种不同的损失函数,这里使用的是交叉熵(cross entropy loss)损失函数 criterion = torch.nn.CrossEntropyLoss() # 这里使用 optim 包进行随机梯度下降(stochastic gradient descent)优化 optimizer = torch.optim.SGD(model.parameters(), lr=learning_rate, weight_decay=lambda_l2) # 开始训练 for t in range(1000): # 把数据输入模型,得到预测结果 y_pred = model(X) # 计算损失和准确率 loss = criterion(y_pred, Y) score, predicted = torch.max(y_pred, 1) acc = (Y == predicted).sum().float() / len(Y) print('[EPOCH]: %i, [LOSS]: %.6f, [ACCURACY]: %.3f' % (t, loss.item(), acc)) display.clear_output(wait=True) # 反向传播前把梯度置 0 optimizer.zero_grad() # 反向传播优化 loss.backward() # 更新全部参数 optimizer.step()
 此图只是用了线性方法使得分类效果不是很理想
此图只是用了线性方法使得分类效果不是很理想
learning_rate = 1e-3 lambda_l2 = 1e-5 # 这里可以看到,和上面模型不同的是,在两层之间加入了一个 ReLU 激活函数 model = nn.Sequential( nn.Linear(D, H), nn.ReLU(), nn.Linear(H, C) ) model.to(device) # 下面的代码和之前是完全一样的,这里不过多叙述 criterion = torch.nn.CrossEntropyLoss() optimizer = torch.optim.Adam(model.parameters(), lr=learning_rate, weight_decay=lambda_l2) # built-in L2 # 训练模型,和之前的代码是完全一样的 for t in range(1000): y_pred = model(X) loss = criterion(y_pred, Y) score, predicted = torch.max(y_pred, 1) acc = ((Y == predicted).sum().float() / len(Y)) print("[EPOCH]: %i, [LOSS]: %.6f, [ACCURACY]: %.3f" % (t, loss.item(), acc)) display.clear_output(wait=True) # zero the gradients before running the backward pass. optimizer.zero_grad() # Backward pass to compute the gradient loss.backward() # Update params optimizer.step()

这是加了ReLU激活函数后,使神经网络具备了分层的非线性映射学习能力。第二个图的效果明显要比上一个图要好。
反向传播前要清零梯度可以让梯度发挥更大的作用。
交叉熵主要是用来判定实际的输出与期望的输出的接近程度.它主要刻画的是实际输出(概率)与期望输出(概率)的距离,也就是交叉熵的值越小,两个概率分布就越接近。
2.4 回归分析
# 这里定义了2个网络,一个 relu_model,一个 tanh_model, # 使用了不同的激活函数 relu_model = nn.Sequential( nn.Linear(D, H), nn.ReLU(), nn.Linear(H, C) ) relu_model.to(device) tanh_model = nn.Sequential( nn.Linear(D, H), nn.Tanh(), nn.Linear(H, C) ) tanh_model.to(device) # MSE损失函数 criterion = torch.nn.MSELoss() # 定义优化器,使用 Adam,这里仍使用 SGD 优化器的化效果会比较差,具体原因请自行百度 optimizer_relumodel = torch.optim.Adam(relu_model.parameters(), lr=learning_rate, weight_decay=lambda_l2) optimizer_tanhmodel = torch.optim.Adam(tanh_model.parameters(), lr=learning_rate, weight_decay=lambda_l2) # 开始训练 for t in range(1000): y_pred_relumodel = relu_model(X) y_pred_tanhmodel = tanh_model(X) # 计算损失与准确率 loss_relumodel = criterion(y_pred_relumodel, y) loss_tanhmodel = criterion(y_pred_tanhmodel, y) print(f"[MODEL]: relu_model, [EPOCH]: {t}, [LOSS]: {loss_relumodel.item():.6f}") print(f"[MODEL]: tanh_model, [EPOCH]: {t}, [LOSS]: {loss_tanhmodel.item():.6f}") display.clear_output(wait=True) optimizer_relumodel.zero_grad() optimizer_tanhmodel.zero_grad() loss_relumodel.backward() loss_tanhmodel.backward() optimizer_relumodel.step() optimizer_tanhmodel.step()
plt.figure(figsize=(12, 6)) def dense_prediction(model, non_linearity): plt.subplot(1, 2, 1 if non_linearity == 'ReLU' else 2) X_new = torch.unsqueeze(torch.linspace(-1, 1, 1001), dim=1).to(device) with torch.no_grad(): y_pred = model(X_new) plt.plot(X_new.cpu().numpy(), y_pred.cpu().numpy(), 'r-', lw=1) plt.scatter(X.cpu().numpy(), y.cpu().numpy(), label='data') plt.axis('square') plt.title(non_linearity + ' models') dense_prediction(relu_model, 'ReLU') dense_prediction(tanh_model, 'Tanh')

由上图可以看到用ReLU函数处理的图像要比用Tanh函数处理的图像要好。
Adam是一种可以替代传统随机梯度下降过程的一阶优化算法,它能基于训练数据迭代地更新神经网络权重。
为什么ReLu要好过sigmoid和tanh?
第一,采用sigmoid等函数,算激活函数时(指数运算),计算量大,反向传播求误差梯度时,求导涉及除法和指数运算,计算量相对大,而采用Relu激活函数,整个过程的计算量节省很多。
第二,对于深层网络,sigmoid函数反向传播时,很容易就会出现梯度消失的情况(在sigmoid接近饱和区时,变换太缓慢,导数趋于0,这种情况会造成信息丢失),这种现象称为饱和,从而无法完成深层网络的训练,为什么会无法完成训练呢,因为神经网络更新w的时候就是依靠导数来更新的,如果导数接近0,那w更新之后还是原来的w了。而ReLU就不会有饱和倾向,不会有特别小的梯度出现。
第三,Relu会使一部分神经元的输出为0,这样就造成了网络的稀疏性,并且减少了参数的相互依存关系,缓解了过拟合问题的发生。当然现在也有一些对relu的改进,比如prelu,random relu等,在不同的数据集上会有一些训练速度上或者准确率上的改进。