- os.path.join坑的记录
半步江南
importrequestsimportosfromos.pathimportjointar=r"\219\1.html"root=os.getcwd()print(root)file_path=join(str(root),str(tar))print(file_path)输出为D:\workdir\py-dir\crapt_web_siteD:\219\1.html与需要的D:\workdir
- UCOS-II 在单片机中的应用
woainizhongguo.
51/STM32单片机单片机嵌入式硬件stm32系统架构
引言在快速发展的嵌入式系统领域,实时操作系统(RTOS)的作用日益凸显,成为推动高效、可靠系统开发的关键组成部分。作为RTOS的杰出代表之一,μC/OS-II因其强大的功能和灵活的配置,已成为许多嵌入式项目的首选。不仅因为它能够提供丰富的多任务处理能力,还因为它在资源管理、任务调度和时间管理等方面的卓越性能。μC/OS-II是一款免费的、可裁剪的、抢占式的实时操作系统内核。它设计用于多任务环境,特
- Python一次性批量下载网页内所有链接
Zhy_Tech
python前端开发语言
需要下载一个数据集,该数据集每一张图对应网页内一条链接,如下图所示。一开始尝试使用迅雷,但是迅雷一次性只能下载30条链接。采用Python成功实现一次性批量下载。importosimportrequestsfrombs4importBeautifulSoup#目标网页的URLurl="https://"#请将此处替换为实际的网页URL#指定下载文件的文件夹路径#使用原始字符串download_fo
- Python-难点-获取项目根目录
1需求2接口3示例4参考资料在Python中,“设置根目录”通常指指定项目的基准路径,以便统一管理文件路径。以下是几种常见方法,结合不同场景和兼容性需求:一、基于路径拼接(最常用)通过手动拼接路径来定义根目录,适用于结构固定的项目。importos#方法1:根据当前文件位置向上递归定义(推荐)defset_project_root():current_file=os.path.abspath(__
- Nginx IP授权页面实现步骤
目标:一、创建白名单文件sudomkdir-p/usr/local/nginx/conf/whitelistsudotouch/usr/local/nginx/conf/whitelist/temporary.conf二、创建Python认证服务文件路径:/opt/script/auth_server.pyimportosimporttimefromflaskimportFlask,request
- freertos任务调度关键函数理解
dddddppppp123
c语言
voidxPortPendSVHandler(void){/*Thisisanakedfunction.*/__asmvolatile(//保存当前任务上下文"mrsr0,psp\n"//读取进程栈指针(PSP)到r0"isb\n"//指令同步屏障,确保前面的指令执行完毕"\n""ldrr3,pxCurrentTCBConst\n"/*GetthelocationofthecurrentTCB.*
- freertos双向链表的插入
dddddppppp123
链表数据结构
uxTopReadyPriority=uxTopReadyPriority|(1ULuxPriority);//listINSERT_END(&pxReadyTasksLists[pxNewTCB->uxPriority],&pxNewTCB->xStateListItem);List_t*pxList_;//指向目标优先级的就绪任务列表(通过TCB的优先级索引)ListItem_t*pxList
- 简单理解 Python EventLoop 事件循环
Python_P叔
python开发语言数据库
简介在python3中,加入了asyncio模块,来实现协程,其中一个很重要的概念是事件循环,整个异步流程都是事件循环推动的。下面自己实现一个相对简单的EventLoop,了解一下事件循环是如何进行运转的。事件循环下面看一下整个流程的实现过程将以下代码写入spider_event_loop.py文件:#spider_event_loop.pyimporttimeimportosimportsock
- 从“一人干多活”到“团队协作”:RTOS多任务调度,居然藏着这么多小聪明!
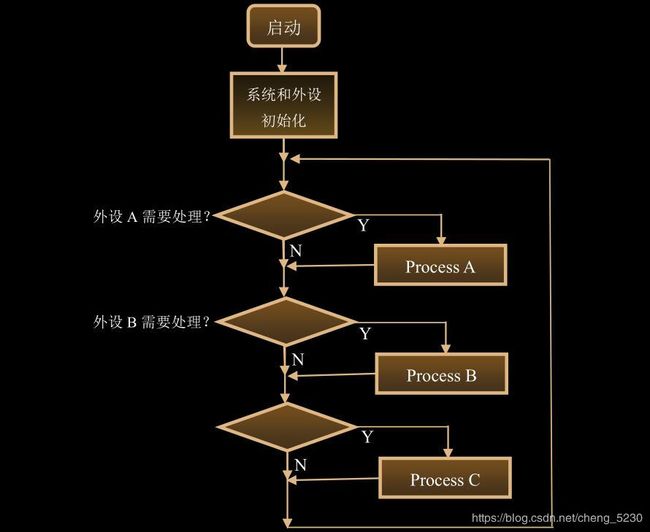
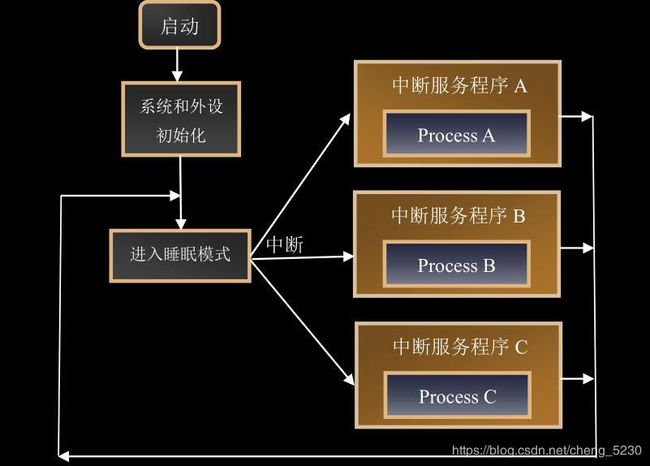
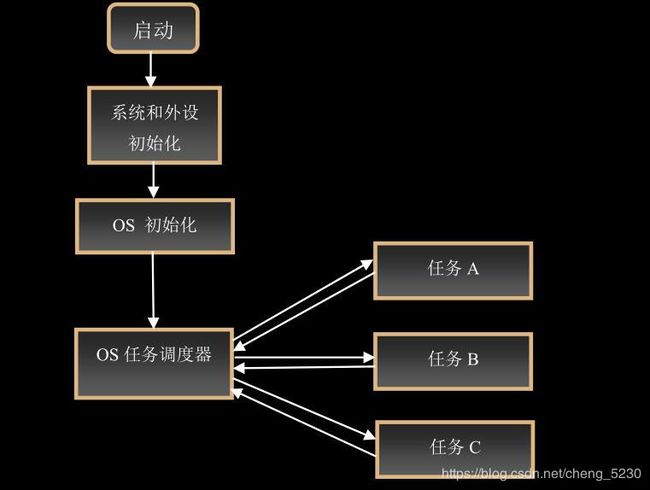
从“一人干多活”到“团队协作”:RTOS多任务调度,居然藏着这么多小聪明!你有没有过这种经历:一边炖着汤,一边炒着菜,还得时不时跑去看一眼烤箱里的面包,结果手忙脚乱打翻了盐罐?嵌入式系统处理任务时,也曾面临同样的“窘境”——裸机系统就像一个人包揽所有活,只能按顺序挨个做;而RTOS(实时操作系统)则像雇了个“智能调度员”,能让多个任务“轮流上岗”,甚至“紧急任务插队”,效率直接翻倍!今天咱们就从裸
- YOLO V8+Python训练手写数字识别
yuanpan
YOLOpython开发语言
以下是针对Windows11+Python环境的详细步骤说明,从数据集整理到模型训练,全部适配YOLOv8流程。1.数据集整理(MNIST→YOLO格式)1.1下载MNIST数据集MNIST数据集可通过Python直接下载(无需手动下载):python复制fromtorchvision.datasetsimportMNISTimportos#自动下载MNIST数据集(图片和标签)train_dat
- 遥感云平台-GEE下载Landsat8/9影像数据(python)
内容介绍上期文章介绍如何在网页端导出Landsat8/9数据,本期主要介绍如何在本地GEE-python端导出数据以及出图。环境配置:Vscode+Jupyternotebook+gee+geemap+python3.10#导出所需要的包,注意提前安装ee和geemapimporteeimportosimportnumpyasnpimportgeemapfromgeemap.datasetsimp
- 某易云音乐获取
我愿与你相伴
python爬取教程python
importosimportrequestsfromlxmlimportetreeheaders={'User-Agent':'Mozilla/5.0(WindowsNT10.0;Win64;x64)AppleWebKit/537.36(KHTML,likeGecko)Chrome/121.0.0.0Safari/537.36','Cookie':'_iuqxldmzr_=32;WEVNSM=1.
- 【python】图片批量压缩脚本
横桥码农
pythonpython
#-*-coding:utf-8-*-'''图片批量压缩脚本将脚本放入待压缩文件夹下,并运行自动生成压缩文件夹compress'''fromPILimportImageimportosimportsysimportiosys.stdout=io.TextIOWrapper(sys.stdout.buffer,encoding='utf-8')defcompress_image(input_imag
- Python脚本压缩图片大小,不损害图片质量
凉风听雪
Pythonpython开发语言
Python源码:同步绑定有exe文件,可下载直接使用importosfromPILimportImagedefcompress_images(input_folder,quality):#确定输出文件夹路径为输入路径同级的"out"output_folder=os.path.join(os.path.dirname(input_folder),"out")#确保输出文件夹存在ifnotos.pa
- Zephyr_FileSystems
LikeShadows
zephyrfilesystemzephyrapiRTOS文件系统
1.文件系统(FileSystems)ZephyrRTOS的虚拟文件系统开关允许应用程序在不同的挂载点(如:/fatfs和/nffs)挂载多个文件系统。挂载点数据结构包含实例化、挂载和操作文件系统所需的所有必要的信息。文件系统开关通过引入文件系统注册机制,将应用程序从直接访问一个文件系统指定的API或内部函数分离开。在Zephyr中,任何文件系统的实现或库可以通过一个文件系统注册API插入或拔出。
- maven本地仓库清缓存py脚本
就叫飞六吧
maven缓存spring
清_remote.repositories、以及.lastUpdated缓存文件,避免换仓库or私服的时候一直往旧地方去download从而引起的failtodownlown问题importosimportsysdefdelete_maven_metadata_files(directory):"""递归删除指定目录下的_remote.repositories和.lastUpdated文件:par
- python基础语法9,用os库实现系统操作并用sys库实现文件操作(简单易上手的python语法教学)
AI 嗯啦
python开发语言
一、os库os.system()是Pythonos库中用于执行操作系统命令的重要方法,它允许在Python程序中直接调用系统shell命令(如Linux的bash命令或Windows的cmd命令)。基本语法importosos.system(command)command:要执行的系统命令字符串(与在终端/命令提示符中输入的命令格式一致)返回值:命令执行的退出状态码(0表示成功,非0表示执行出错)
- 利用Python实现QQ实时到账 免签支付 原创
0xdF
Python学习python
原创转载请注明出处核心部分:解决QQ的登录验证问题主要利用python的selenium库和QQ的快速登录实现登录网页再利用抓到的json来输出今日的订单情况直接上代码importrequestsimporttimeimportosfromseleniumimportwebdriverimportsysimportshutilimportjson'''注意:要实现QQ钱包实时到账需要在服务器上登录
- mac mlx大模型框架的安装和使用
liliangcsdn
pythonjava前端人工智能macos
mlx是apple平台的大模型推理框架,对macm1系列处理器支持较好。这里记录mlx安装和运行示例。1安装mlx框架condacreate-nmlxpython=3.12condaactivatemlxpipinstallmlx-lm2运行mlx测试例以下是测试程序,使用方法和hf、vllm等推理框架基本一致。importosos.environ['HF_ENDPOINT']="https://
- 【Freertos实战】零基础制作基于stm32的物联网温湿度检测(教程非常简易)持续更新中.........
熬夜的猪仔
stm32物联网嵌入式硬件
本次记录采用Freertos的第二个DIY作品,基于Onenet的物联网温湿度检测系统,此次代码依然是全部开源。通过网盘分享的文件:物联网温湿度检测.rar链接:https://pan.baidu.com/s/1uj9UURVtGE6ZB6OsL2W8lw?pwd=qm2e提取码:qm2e大家也可以看看我上个的开源项目【Freertos实战】零基础制作基于stm32智能小车(教程非常简易)实物演示
- rtos内存管理
林内克思
javalinux算法
FreeRTOS将内存分配API保留在其可移植层,提供了五种内存管理算法:heap_1:最简单,不允许释放内存。heap_2:允许释放内存,但不会合并相邻的空闲块。heap_3:简单包装了标准malloc()和free(),以保证线程安全。heap_4:合并相邻的空闲块以避免碎片化。包含绝对地址放置选项。heap_5:如同heap_4,能够跨越多个不相邻内存区域的堆。特点缺点heap_1简单、不支
- 将多个小型YOLO数据集合并为一个大型数据集
梦实学习室
YOLOpythonYOLOpython机器学习
一、将多个小型YOLO数据集合并为一个大型数据集importosimportshutilimportargparsedefmerge_data(source_dir,target_dir,images_dir,labels_dir):images_target=os.path.join(target_dir,images_dir)labels_target=os.path.join(target_
- 针对esp32-c5写一个示例程序,此程序主要是扫描2.4G+5.8Gwifi,然后链接,可能通过自定义的at指令
包含:自定义AT命令(AT+SCAN=2G,AT+SCAN=5G,AT+CONN=ssid,pwd,2G/5G)2.4GHz与5GHz扫描逻辑,并按频段过滤并打印结果STA模式初始化、事件回调处理连接指定SSID/密码的示例详细的中文注释,帮助理解每个模块的设计与实现#include#include#include"freertos/FreeRTOS.h"#include"freertos/eve
- 整体无需占用任何硬件 UART,即可新增一条全双工软串口
#include#include"freertos/FreeRTOS.h"#include"freertos/task.h"#include"freertos/ringbuf.h"#include"driver/rmt.h"#include"driver/gpio.h"#include"esp_log.h"staticconstchar*TAG="soft_uart_rmt";//--------
- 在本地部署mcp服务器实现自然语言操作mysql数据库,轻松实现数据表的增~ 删~ 改~ 查~
@Ma
数据库服务器mysql
1.将写好的mcp_server代码放在本地任意盘!importasyncioimportloggingimportosimportsysfrommysql.connectorimportconnect,Errorfrommcp.serverimportServerfrommcp.typesimportResource,Tool,TextContentfrompydanticimportAnyUr
- Python pyautogui 操作鼠标
HappyBirthday 9527
Pythonpython计算机外设开发语言
importtimeimportosimportpyautoguivalue=True;try:whilevalue:x,y=pyautogui.position()pos="鼠标当前位置:{},{}".format(str(x),str(y))print(pos)time.sleep(0.2)os.system('cls')exceptKeyboardInterrupt:print("end..
- Python综合应用学生管理系统
主要是复习使用,希望大佬提意见整体结构与核心数据结构importosimportsysstudents=[]上述代码引入了os和sys模块,os模块用于处理文件和目录相关操作,sys模块提供了对Python解释器相关变量和函数的访问。students列表作为核心数据结构,用于存储所有学生的信息,后续对学生信息的增删改查操作都围绕它展开。菜单功能实现defmenu():"""显示程序菜单"""pri
- FreeRTOS基础知识学习指南
以下内容涵盖FreeRTOS的核心概念,包括任务管理、调度、中断、互斥量与信号量、队列和内存管理等主题。每部分提供基本原理说明,并辅以简要的代码示例帮助理解。1.任务管理(TaskManagement)任务的创建与删除:FreeRTOS中的任务相当于独立的线程。可以使用xTaskCreate()动态创建任务,或使用xTaskCreateStatic()静态创建任务(提供预先分配的栈和控制块内存)。
- FreeRTOS学习--1、初识FreeRTOS
BiaoMa_Fighting
FreeRTOS学习笔记学习
1、什么是FreeRTOS?FreeRTOS是RTOS系统的一种,FreeRTOS十分的小巧,可以在资源有限的微控制器中运行,当然,FreeRTOS不仅局限于在微控制器中使用。但从文件数量上来看FreeRTOS要比uC/OSII和uC/OSIII小的多。2、FreeRTOS特点(1)FreeRTOS内核支持抢占式、合作式和时间片调度;(2)能够提供一个低功耗的Tickless模式;(3)已将在超过
- 使用 FreeRTOS 实现简单多任务调度(初识 RTOS)
欢乐熊嵌入式编程
FreeRTOS嵌入式开发多任务调度RTOS单片机
使用FreeRTOS实现简单多任务调度(初识RTOS)“裸机是手动挡,RTOS是自动挡。程序员也要学会偷懒!”——《从延时到调度:嵌入式人的进阶之路》一、什么是RTOS?为啥你迟早会用上它?RTOS,全名Real-TimeOperatingSystem(实时操作系统)。简单理解,它是为MCU打工的“调度大脑”,能帮你搞定这些烦人的事:多个任务如何“分时共享CPU”谁先执行谁后执行哪个任务被中断了怎
- 关于旗正规则引擎下载页面需要弹窗保存到本地目录的问题
何必如此
jsp超链接文件下载窗口
生成下载页面是需要选择“录入提交页面”,生成之后默认的下载页面<a>标签超链接为:<a href="<%=root_stimage%>stimage/image.jsp?filename=<%=strfile234%>&attachname=<%=java.net.URLEncoder.encode(file234filesourc
- 【Spark九十八】Standalone Cluster Mode下的资源调度源代码分析
bit1129
cluster
在分析源代码之前,首先对Standalone Cluster Mode的资源调度有一个基本的认识:
首先,运行一个Application需要Driver进程和一组Executor进程。在Standalone Cluster Mode下,Driver和Executor都是在Master的监护下给Worker发消息创建(Driver进程和Executor进程都需要分配内存和CPU,这就需要Maste
- linux上独立安装部署spark
daizj
linux安装spark1.4部署
下面讲一下linux上安装spark,以 Standalone Mode 安装
1)首先安装JDK
下载JDK:jdk-7u79-linux-x64.tar.gz ,版本是1.7以上都行,解压 tar -zxvf jdk-7u79-linux-x64.tar.gz
然后配置 ~/.bashrc&nb
- Java 字节码之解析一
周凡杨
java字节码javap
一: Java 字节代码的组织形式
类文件 {
OxCAFEBABE ,小版本号,大版本号,常量池大小,常量池数组,访问控制标记,当前类信息,父类信息,实现的接口个数,实现的接口信息数组,域个数,域信息数组,方法个数,方法信息数组,属性个数,属性信息数组
}
&nbs
- java各种小工具代码
g21121
java
1.数组转换成List
import java.util.Arrays;
Arrays.asList(Object[] obj); 2.判断一个String型是否有值
import org.springframework.util.StringUtils;
if (StringUtils.hasText(str)) 3.判断一个List是否有值
import org.spring
- 加快FineReport报表设计的几个心得体会
老A不折腾
finereport
一、从远程服务器大批量取数进行表样设计时,最好按“列顺序”取一个“空的SQL语句”,这样可提高设计速度。否则每次设计时模板均要从远程读取数据,速度相当慢!!
二、找一个富文本编辑软件(如NOTEPAD+)编辑SQL语句,这样会很好地检查语法。有时候带参数较多检查语法复杂时,结合FineReport中生成的日志,再找一个第三方数据库访问软件(如PL/SQL)进行数据检索,可以很快定位语法错误。
- mysql linux启动与停止
墙头上一根草
如何启动/停止/重启MySQL一、启动方式1、使用 service 启动:service mysqld start2、使用 mysqld 脚本启动:/etc/inint.d/mysqld start3、使用 safe_mysqld 启动:safe_mysqld&二、停止1、使用 service 启动:service mysqld stop2、使用 mysqld 脚本启动:/etc/inin
- Spring中事务管理浅谈
aijuans
spring事务管理
Spring中事务管理浅谈
By Tony Jiang@2012-1-20 Spring中对事务的声明式管理
拿一个XML举例
[html]
view plain
copy
print
?
<?xml version="1.0" encoding="UTF-8"?>&nb
- php中隐形字符65279(utf-8的BOM头)问题
alxw4616
php中隐形字符65279(utf-8的BOM头)问题
今天遇到一个问题. php输出JSON 前端在解析时发生问题:parsererror.
调试:
1.仔细对比字符串发现字符串拼写正确.怀疑是 非打印字符的问题.
2.逐一将字符串还原为unicode编码. 发现在字符串头的位置出现了一个 65279的非打印字符.
- 调用对象是否需要传递对象(初学者一定要注意这个问题)
百合不是茶
对象的传递与调用技巧
类和对象的简单的复习,在做项目的过程中有时候不知道怎样来调用类创建的对象,简单的几个类可以看清楚,一般在项目中创建十几个类往往就不知道怎么来看
为了以后能够看清楚,现在来回顾一下类和对象的创建,对象的调用和传递(前面写过一篇)
类和对象的基础概念:
JAVA中万事万物都是类 类有字段(属性),方法,嵌套类和嵌套接
- JDK1.5 AtomicLong实例
bijian1013
javathreadjava多线程AtomicLong
JDK1.5 AtomicLong实例
类 AtomicLong
可以用原子方式更新的 long 值。有关原子变量属性的描述,请参阅 java.util.concurrent.atomic 包规范。AtomicLong 可用在应用程序中(如以原子方式增加的序列号),并且不能用于替换 Long。但是,此类确实扩展了 Number,允许那些处理基于数字类的工具和实用工具进行统一访问。
- 自定义的RPC的Java实现
bijian1013
javarpc
网上看到纯java实现的RPC,很不错。
RPC的全名Remote Process Call,即远程过程调用。使用RPC,可以像使用本地的程序一样使用远程服务器上的程序。下面是一个简单的RPC 调用实例,从中可以看到RPC如何
- 【RPC框架Hessian一】Hessian RPC Hello World
bit1129
Hello world
什么是Hessian
The Hessian binary web service protocol makes web services usable without requiring a large framework, and without learning yet another alphabet soup of protocols. Because it is a binary p
- 【Spark九十五】Spark Shell操作Spark SQL
bit1129
shell
在Spark Shell上,通过创建HiveContext可以直接进行Hive操作
1. 操作Hive中已存在的表
[hadoop@hadoop bin]$ ./spark-shell
Spark assembly has been built with Hive, including Datanucleus jars on classpath
Welcom
- F5 往header加入客户端的ip
ronin47
when HTTP_RESPONSE {if {[HTTP::is_redirect]}{ HTTP::header replace Location [string map {:port/ /} [HTTP::header value Location]]HTTP::header replace Lo
- java-61-在数组中,数字减去它右边(注意是右边)的数字得到一个数对之差. 求所有数对之差的最大值。例如在数组{2, 4, 1, 16, 7, 5,
bylijinnan
java
思路来自:
http://zhedahht.blog.163.com/blog/static/2541117420116135376632/
写了个java版的
public class GreatestLeftRightDiff {
/**
* Q61.在数组中,数字减去它右边(注意是右边)的数字得到一个数对之差。
* 求所有数对之差的最大值。例如在数组
- mongoDB 索引
开窍的石头
mongoDB索引
在这一节中我们讲讲在mongo中如何创建索引
得到当前查询的索引信息
db.user.find(_id:12).explain();
cursor: basicCoursor 指的是没有索引
&
- [硬件和系统]迎峰度夏
comsci
系统
从这几天的气温来看,今年夏天的高温天气可能会维持在一个比较长的时间内
所以,从现在开始准备渡过炎热的夏天。。。。
每间房屋要有一个落地电风扇,一个空调(空调的功率和房间的面积有密切的关系)
坐的,躺的地方要有凉垫,床上要有凉席
电脑的机箱
- 基于ThinkPHP开发的公司官网
cuiyadll
行业系统
后端基于ThinkPHP,前端基于jQuery和BootstrapCo.MZ 企业系统
轻量级企业网站管理系统
运行环境:PHP5.3+, MySQL5.0
系统预览
系统下载:http://www.tecmz.com
预览地址:http://co.tecmz.com
各种设备自适应
响应式的网站设计能够对用户产生友好度,并且对于
- Transaction and redelivery in JMS (JMS的事务和失败消息重发机制)
darrenzhu
jms事务承认MQacknowledge
JMS Message Delivery Reliability and Acknowledgement Patterns
http://wso2.com/library/articles/2013/01/jms-message-delivery-reliability-acknowledgement-patterns/
Transaction and redelivery in
- Centos添加硬盘完全教程
dcj3sjt126com
linuxcentoshardware
Linux的硬盘识别:
sda 表示第1块SCSI硬盘
hda 表示第1块IDE硬盘
scd0 表示第1个USB光驱
一般使用“fdisk -l”命
- yii2 restful web服务路由
dcj3sjt126com
PHPyii2
路由
随着资源和控制器类准备,您可以使用URL如 http://localhost/index.php?r=user/create访问资源,类似于你可以用正常的Web应用程序做法。
在实践中,你通常要用美观的URL并采取有优势的HTTP动词。 例如,请求POST /users意味着访问user/create动作。 这可以很容易地通过配置urlManager应用程序组件来完成 如下所示
- MongoDB查询(4)——游标和分页[八]
eksliang
mongodbMongoDB游标MongoDB深分页
转载请出自出处:http://eksliang.iteye.com/blog/2177567 一、游标
数据库使用游标返回find的执行结果。客户端对游标的实现通常能够对最终结果进行有效控制,从shell中定义一个游标非常简单,就是将查询结果分配给一个变量(用var声明的变量就是局部变量),便创建了一个游标,如下所示:
> var
- Activity的四种启动模式和onNewIntent()
gundumw100
android
Android中Activity启动模式详解
在Android中每个界面都是一个Activity,切换界面操作其实是多个不同Activity之间的实例化操作。在Android中Activity的启动模式决定了Activity的启动运行方式。
Android总Activity的启动模式分为四种:
Activity启动模式设置:
<acti
- 攻城狮送女友的CSS3生日蛋糕
ini
htmlWebhtml5csscss3
在线预览:http://keleyi.com/keleyi/phtml/html5/29.htm
代码如下:
<!DOCTYPE html>
<html>
<head>
<meta charset="UTF-8">
<title>攻城狮送女友的CSS3生日蛋糕-柯乐义<
- 读源码学Servlet(1)GenericServlet 源码分析
jzinfo
tomcatWebservlet网络应用网络协议
Servlet API的核心就是javax.servlet.Servlet接口,所有的Servlet 类(抽象的或者自己写的)都必须实现这个接口。在Servlet接口中定义了5个方法,其中有3个方法是由Servlet 容器在Servlet的生命周期的不同阶段来调用的特定方法。
先看javax.servlet.servlet接口源码:
package
- JAVA进阶:VO(DTO)与PO(DAO)之间的转换
snoopy7713
javaVOHibernatepo
PO即 Persistence Object VO即 Value Object
VO和PO的主要区别在于: VO是独立的Java Object。 PO是由Hibernate纳入其实体容器(Entity Map)的对象,它代表了与数据库中某条记录对应的Hibernate实体,PO的变化在事务提交时将反应到实际数据库中。
实际上,这个VO被用作Data Transfer
- mongodb group by date 聚合查询日期 统计每天数据(信息量)
qiaolevip
每天进步一点点学习永无止境mongodb纵观千象
/* 1 */
{
"_id" : ObjectId("557ac1e2153c43c320393d9d"),
"msgType" : "text",
"sendTime" : ISODate("2015-06-12T11:26:26.000Z")
- java之18天 常用的类(一)
Luob.
MathDateSystemRuntimeRundom
System类
import java.util.Properties;
/**
* System:
* out:标准输出,默认是控制台
* in:标准输入,默认是键盘
*
* 描述系统的一些信息
* 获取系统的属性信息:Properties getProperties();
*
*
*
*/
public class Sy
- maven
wuai
maven
1、安装maven:解压缩、添加M2_HOME、添加环境变量path
2、创建maven_home文件夹,创建项目mvn_ch01,在其下面建立src、pom.xml,在src下面简历main、test、main下面建立java文件夹
3、编写类,在java文件夹下面依照类的包逐层创建文件夹,将此类放入最后一级文件夹
4、进入mvn_ch01
4.1、mvn compile ,执行后会在