openCV学习笔记(十一)-- 模板匹配,轮廓操作
- 模板匹配
- 轮廓发现及绘制轮廓
- 凸包
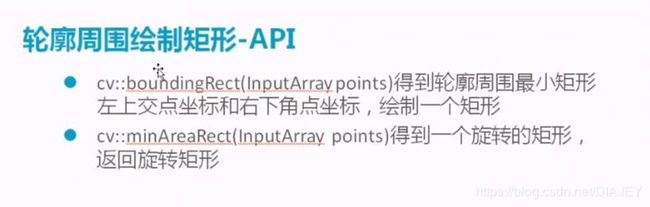
- 轮廓周围绘制矩形或圆形
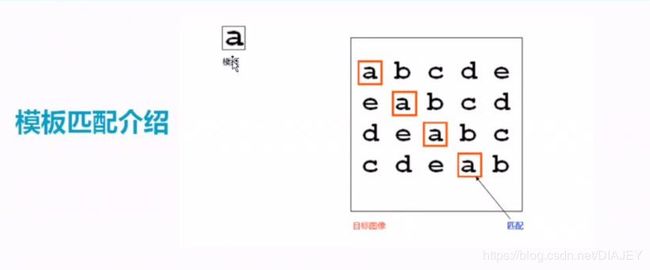
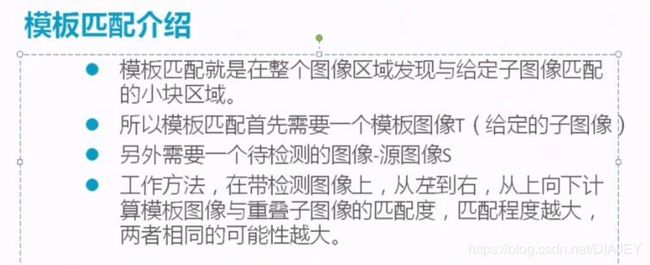
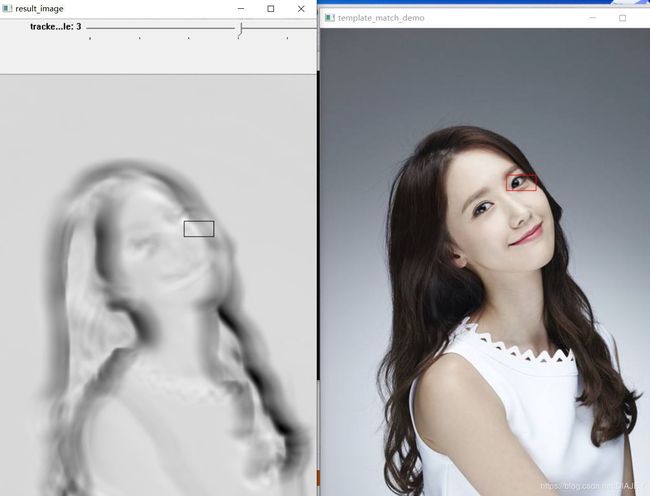
1.模板匹配
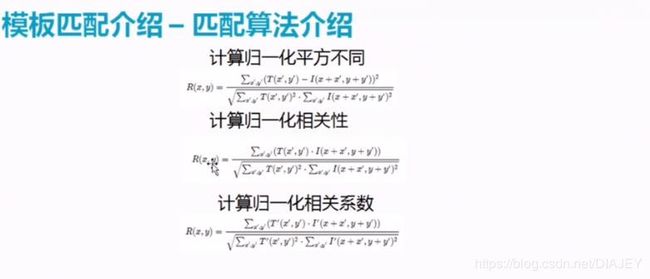
归一化后的模板匹配算法:
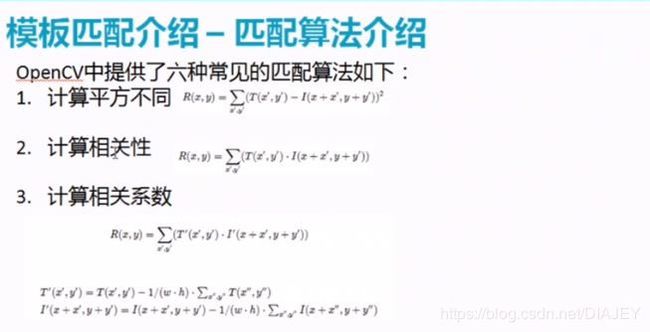
在API中对应模板匹配算法的定义:


模板匹配算法API:

具体实现:
//模板匹配
#include效果图:
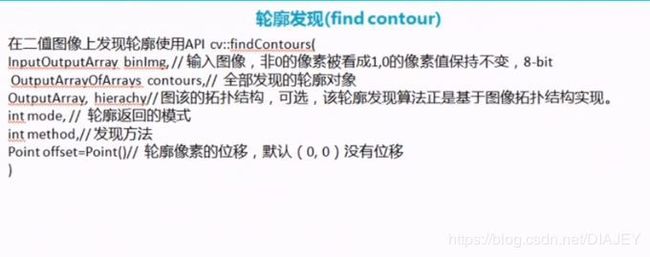
2.轮廓发现


轮廓发现及绘制轮廓API:

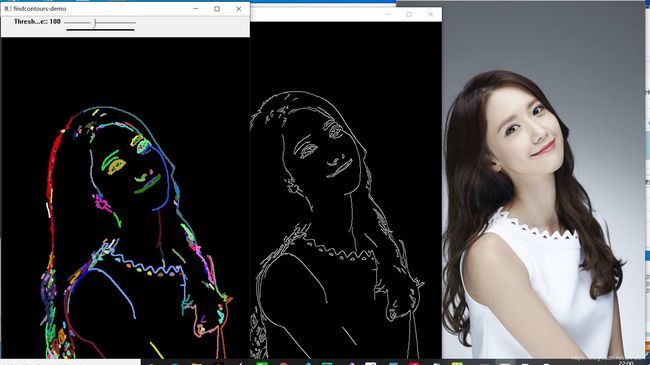
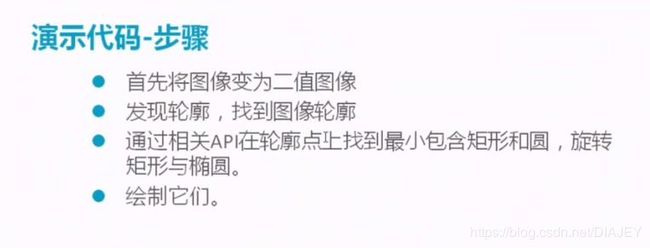
具体实现步骤:
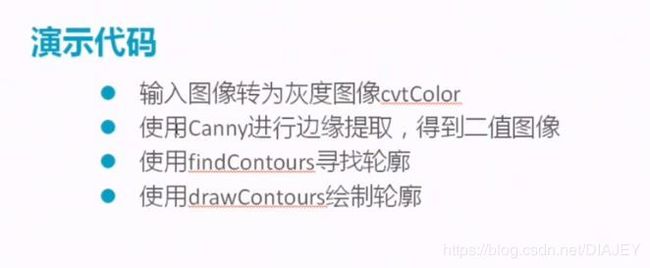
代码实现:
#include效果图:
3.凸包

凸包特征

凸包扫描算法:
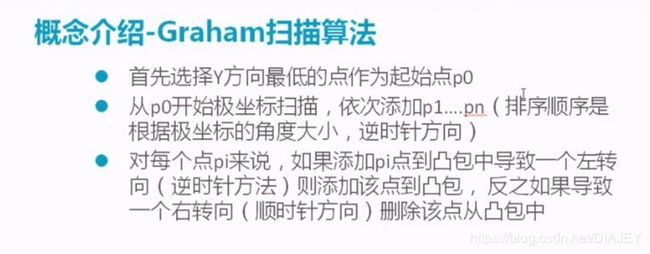
凸包检测时,可以预定顺时针或逆时针旋转,但是都不可逆

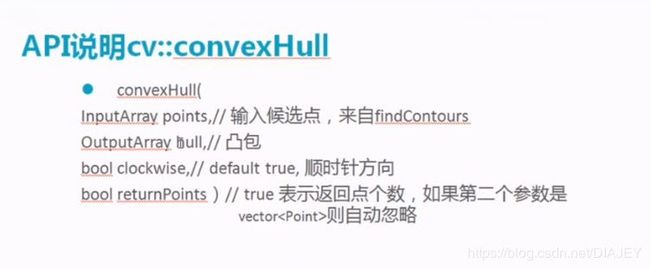
对应API:
openCV凸包检测步骤:

效果:
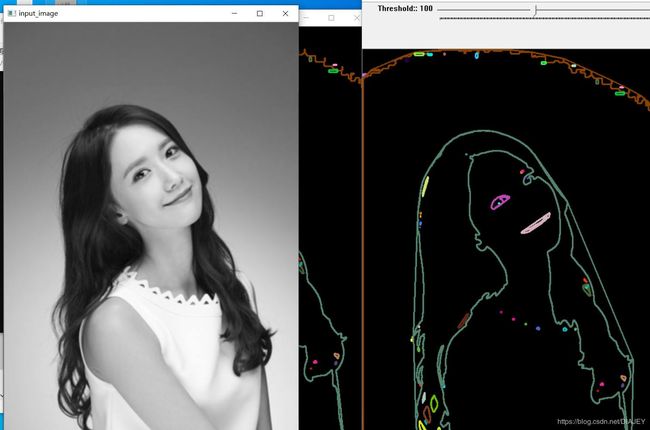
可以看见,凸包会将所有轮廓包围在内,大小轮廓都有对应的凸包
代码实现:
//凸包
#include4. 轮廓周围绘制矩形或圆形
绘制矩形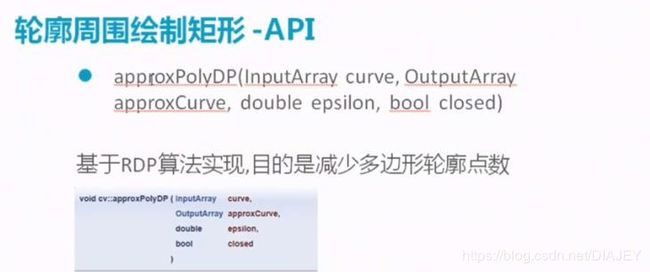
什么是RDP算法?

对应就是设定最短距离,两点间最短距离小于最短距离的就要舍去中间点
绘制圆形

绘制步骤
效果图:

openCV代码:
//绘制边缘矩形和圆形
#include