cv1.0入门
作者 群号 C语言交流中心 240137450 微信 15013593099
环境
VS2010UltimTrial1.iso http://pan.baidu.com/s/1dEL85kl
VS2010UltimTrialCHS版注册码 YCFHQ-9DWCY-DKV88-T2TMH-G7BHP
opencv-2.4.9.exe http://pan.baidu.com/s/1kVaVwoR
图片地址: f:\img\
操作系统:
XP http://pan.baidu.com/s/1bY5SHS
SP3 http://pan.baidu.com/s/1bAPuGY
运行在虚拟机中 VM10.0.3 build-1895310 http://pan.baidu.com/s/1dEQsno1
VMKEY 5F29M-48312-8ZDF9-A8A5K-2AM0Z
1Y0W5-0W205-7Z8J0-C8C5M-9A6MF
读取文件
#include
#include
using namespace cv;
using namespace std;
int main(int argc, const char** argv)
{
Mat img = imread("f:\\img\\lena.jpg");
if (img.empty())
{
cout << "图像加载失败!" << endl;
return -1;
}
//创建一个名字为MyWindow的窗口
namedWindow("MyWindow", CV_WINDOW_AUTOSIZE);
//在MyWindow的窗中中显示存储在img中的图片
imshow("MyWindow", img);
//等待直到有键按下
waitKey(0);
//销毁MyWindow的窗口
destroyWindow("MyWindow");
return 0;
} sobel laplace canny
#include
#include
using namespace cv;
using namespace std;
int main(int argc, char* argv[])
{
Mat src = imread("f:\\img\\QQ.png");
Mat dst;
//输入图像
//输出图像
//输入图像颜色通道数
//x方向阶数
//y方向阶数
Sobel(src,dst,src.depth(),1,1);
imwrite("sobel.jpg",dst);
imshow("sobel",dst);
imshow("src",src);
//输入图像
//输出图像
//输入图像颜色通道数
Laplacian(src,dst,src.depth());
imwrite("laplacian.jpg",dst);
imshow("laplacian",dst);
//输入图像
//输出图像
//彩色转灰度
cvtColor(src,src,CV_BGR2GRAY); //canny只处理灰度图
//输入图像
//输出图像
//低阈值
//高阈值,opencv建议是低阈值的3倍
//内部sobel滤波器大小
Canny(src,dst,50,150,3);
imwrite("canny.jpg",dst);
imshow("canny",dst);
waitKey();
return 0;
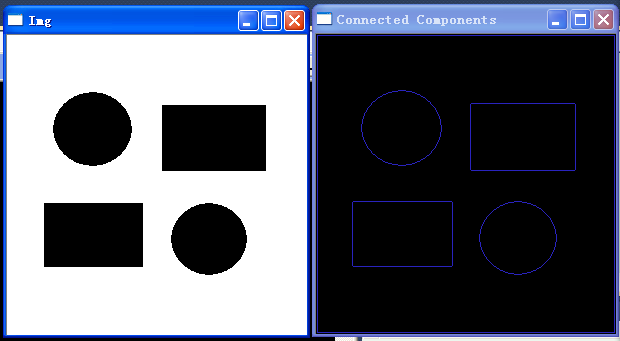
} 轮廓
#include
#include
using namespace cv;
using namespace std;
int main()
{
const char* inputImage = "f:\\img\\circle.jpg";
Mat img;
int threshval =100;
img = imread(inputImage,0);
if (img.empty())
{
cout << "Could not read input image file: " << inputImage << endl;
return -1;
}
img = img >110;
//namedWindow("Img", 1);
imshow("Img", img);
vector > contours;
vectorhierarchy;
Mat dst = Mat::zeros(img.rows, img.cols, CV_8UC3);
findContours(img, contours,hierarchy, CV_RETR_CCOMP, CV_CHAIN_APPROX_SIMPLE);
if( !contours.empty() && !hierarchy.empty() )
{
int idx = 0;
for( ; idx >= 0; idx = hierarchy[idx][0] )
{
Scalar color( (rand()&255), (rand()&255), (rand()&255) );
drawContours( dst, contours, idx, color, 1, 8, hierarchy );
}
}
//namedWindow("Connected Components", 1);
imshow( "Connected Components", dst );
waitKey(0);
return 0;
} findContours函数,这个函数的原型为:
void findContours(InputOutputArray image, OutputArrayOfArrayscontours, OutputArray hierar-
chy, int mode, int method, Point offset=Point())
参数说明
输入图像image必须为一个2值单通道图像
contours参数为检测的轮廓数组,每一个轮廓用一个point类型的vector表示
hiararchy参数和轮廓个数相同,每个轮廓contours[ i ]对应4个hierarchy元素hierarchy[ i ][0 ] ~hierarchy[ i ][ 3],分别表示后一个轮廓、前一个轮廓、父轮廓、内嵌轮廓的索引编号,如果没有对应项,该值设置为负数。
mode表示轮廓的检索模式
CV_RETR_EXTERNAL表示只检测外轮廓
CV_RETR_LIST检测的轮廓不建立等级关系
CV_RETR_CCOMP建立两个等级的轮廓,上面的一层为外边界,里面的一层为内孔的边界信息。如果内孔内还有一个连通物体,这个物体的边界也在顶层。
CV_RETR_TREE建立一个等级树结构的轮廓。具体参考contours.c这个demo
method为轮廓的近似办法
CV_CHAIN_APPROX_NONE存储所有的轮廓点,相邻的两个点的像素位置差不超过1,即max(abs(x1-x2),abs(y2-y1))==1
CV_CHAIN_APPROX_SIMPLE压缩水平方向,垂直方向,对角线方向的元素,只保留该方向的终点坐标,例如一个矩形轮廓只需4个点来保存轮廓信息
CV_CHAIN_APPROX_TC89_L1,CV_CHAIN_APPROX_TC89_KCOS使用teh-Chinl chain近似算法
offset表示代表轮廓点的偏移量,可以设置为任意值。对ROI图像中找出的轮廓,并要在整个图像中进行分析时,这个参数还是很有用的。
findContours后会对输入的2值图像改变,所以如果不想改变该2值图像,需创建新mat来存放,findContours后的轮廓信息contours可能过于复杂不平滑,可以用approxPolyDP函数对该多边形曲线做适当近似
contourArea函数可以得到当前轮廓包含区域的大小,方便轮廓的筛选
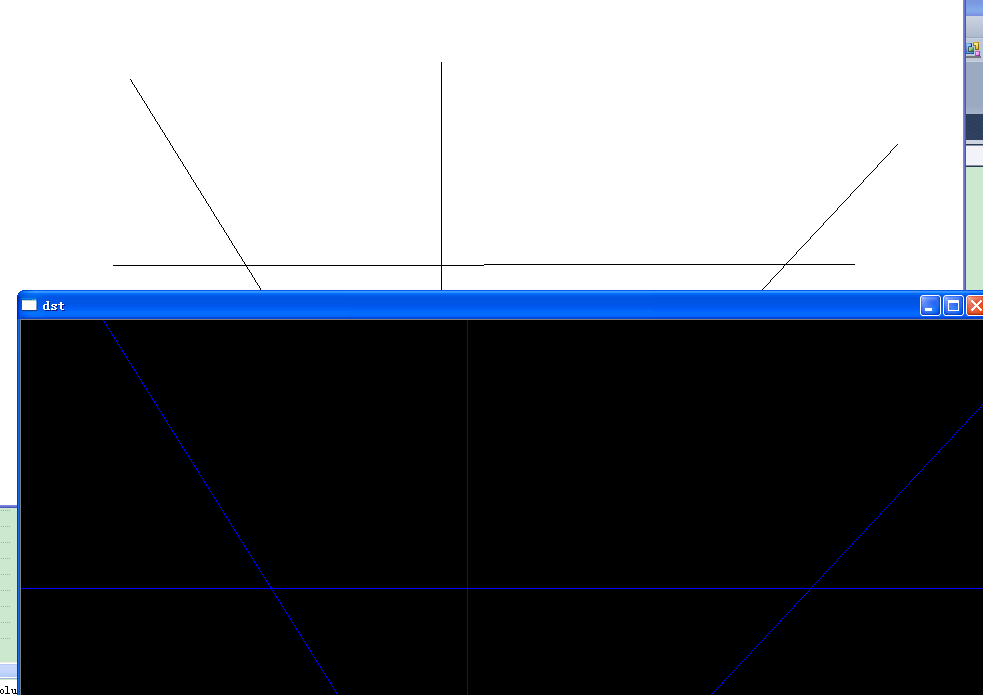
hough找直线
hough变换
#include
#include
using namespace cv;
using namespace std;
#include
#define PI 3.14159265358979
int main(int argc, char *argv[])
{
cv::Mat image = cv::imread("f:\\img\\line.png");
//resize(image,image,Size(image.rows/2, image.cols/2),0,0,CV_INTER_LINEAR);
cv::Mat contours;
cv::cvtColor(image, contours, cv::COLOR_BGR2GRAY);
cv::bitwise_not(contours, contours);
//cv::Canny(image, contours, 155, 350);
std::vector lines;
cv::HoughLines(contours, lines, 1, PI/180, 180);
//cv::imshow("cany",contours );
std::vector::const_iterator it= lines.begin();
Mat dst = Mat::zeros(image.rows, image.cols, CV_8UC3);
while (it!=lines.end())
{
float rho= (*it)[0]; // first element is distance rho
float theta= (*it)[1]; // second element is angle theta
if (theta < PI/4. || theta > 3.*PI/4.)// ~vertical line
{
// point of intersection of the line with first row
cv::Point pt1(rho/cos(theta), 0);
// point of intersection of the line with last row
cv::Point pt2((rho - image.rows * sin(theta))/cos(theta), image.rows);
// draw a white line
cv::line( dst, pt1, pt2, cv::Scalar(255), 1);
}
else
{ // ~horizontal line
// point of intersection of the
// line with first column
cv::Point pt1(0,rho/sin(theta));
// point of intersection of the line with last column
cv::Point pt2(image.cols, (rho - image.cols * cos(theta))/sin(theta));
// draw a white line
cv::line(dst, pt1, pt2, cv::Scalar(255), 1);
}
++it;
}
cv::imshow("src", image);
cv::imshow("dst", dst);
waitKey(0);
return 0;
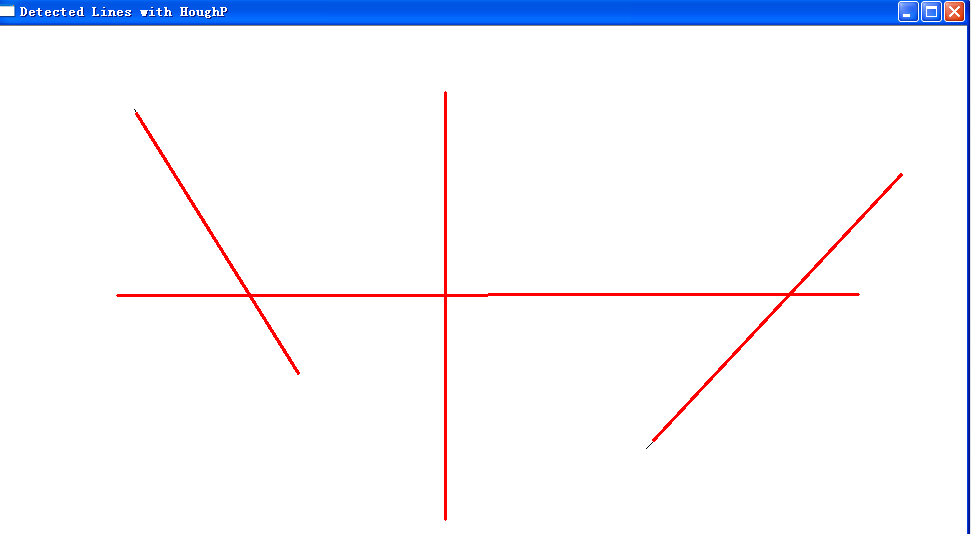
} 概率hough变换
#include
#include
using namespace cv;
using namespace std;
#include
#define PI 3.14159265358979
class LineFinder
{
private:
cv::Mat img; // original image
std::vector lines;
double deltaRho;
double deltaTheta;
int minVote;
double minLength; // min length for a line
double maxGap; // max allowed gap along the line
public:
// Default accumulator resolution is 1 pixel by 1 degree
// no gap, no mimimum length
LineFinder() : deltaRho(1),
deltaTheta(PI/180),
minVote(10),
minLength(0.),
maxGap(0.) {}
// Set the resolution of the accumulator
void setAccResolution(double dRho, double dTheta)
{
deltaRho= dRho;
deltaTheta= dTheta;
}
// Set the minimum number of votes
void setMinVote(int minv)
{
minVote= minv;
}
// Set line length and gap
void setLineLengthAndGap(double length, double gap)
{
minLength= length;
maxGap= gap;
}
// Apply probabilistic Hough Transform
std::vector findLines(cv::Mat& binary)
{
lines.clear();
cv::HoughLinesP(binary, lines, deltaRho, deltaTheta, minVote, minLength, maxGap);
return lines;
}
// Draw the detected lines on an image
void drawDetectedLines(cv::Mat &image, cv::Scalar color = cv::Scalar(255, 255, 255))
{
// Draw the lines
std::vector::const_iterator it2 = lines.begin();
while (it2 != lines.end())
{
cv::Point pt1((*it2)[0],(*it2)[1]);
cv::Point pt2((*it2)[2],(*it2)[3]);
cv::line( image, pt1, pt2, color, 2);
++it2;
}
}
};
int main(int argc, char *argv[])
{
cv::Mat image = cv::imread("f:\\img\\line.png");
cv::Mat contours;
cv::cvtColor(image, contours, cv::COLOR_BGR2GRAY);
cv::bitwise_not(contours, contours);
//cv::Canny(image, contours, 155, 350);
LineFinder finder;
// Set probabilistic Hough parameters
finder.setLineLengthAndGap(100, 20);
finder.setMinVote(80);
// Detect lines and draw them
std::vector lines = finder.findLines(contours);
finder.drawDetectedLines(image, cv::Scalar(0, 0, 255));
//cv::namedWindow("Detected Lines with HoughP");
cv::imshow("Detected Lines with HoughP",image);
waitKey(0);
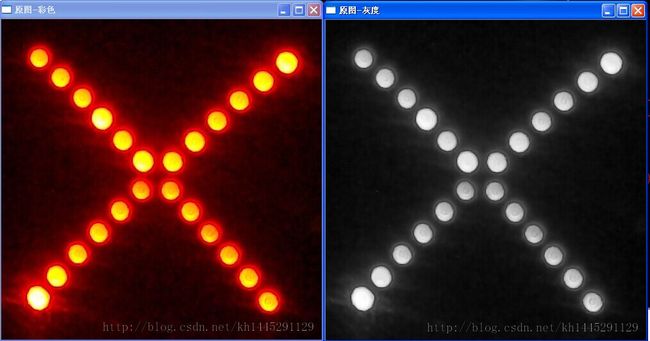
} 找圆 hough
#include
using namespace cv;
using namespace std;
const int kvalue = 15;//双边滤波邻域大小
int main()
{
Mat src_color = imread("f:\\img\\c1.png");//读取原彩色图
imshow("原图-彩色", src_color);
//声明一个三通道图像,像素值全为0,用来将霍夫变换检测出的圆画在上面
Mat dst(src_color.size(), src_color.type());
dst = Scalar::all(0);
Mat src_gray;//彩色图像转化成灰度图
cvtColor(src_color, src_gray, COLOR_BGR2GRAY);
imshow("原图-灰度", src_gray);
imwrite("src_gray.png", src_gray);
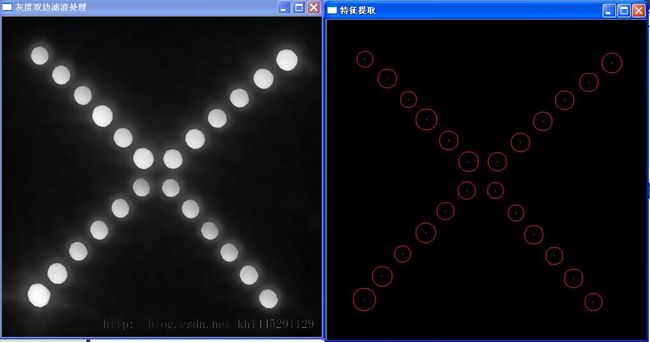
Mat bf;//对灰度图像进行双边滤波
bilateralFilter(src_gray, bf, kvalue, kvalue*2, kvalue/2);
imshow("灰度双边滤波处理", bf);
imwrite("src_bf.png", bf);
vector circles;//声明一个向量,保存检测出的圆的圆心坐标和半径
HoughCircles(bf, circles, CV_HOUGH_GRADIENT, 1.5, 20, 130, 38, 10, 50);//霍夫变换检测圆
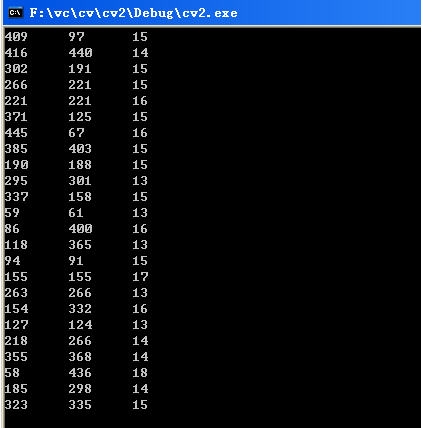
cout << "x=\ty=\tr=" << endl;
for(size_t i = 0; i < circles.size(); i++)//把霍夫变换检测出的圆画出来
{
Point center(cvRound(circles[i][0]), cvRound(circles[i][1]));
int radius = cvRound(circles[i][2]);
circle( dst, center, 0, Scalar(0, 255, 0), -1, 8, 0 );
circle( dst, center, radius, Scalar(0, 0, 255), 1, 8, 0 );
cout << cvRound(circles[i][0]) << "\t" << cvRound(circles[i][1]) << "\t"
<< cvRound(circles[i][2]) << endl;//在控制台输出圆心坐标和半径
}
imshow("特征提取", dst);
imwrite("dst.png", dst);
waitKey();
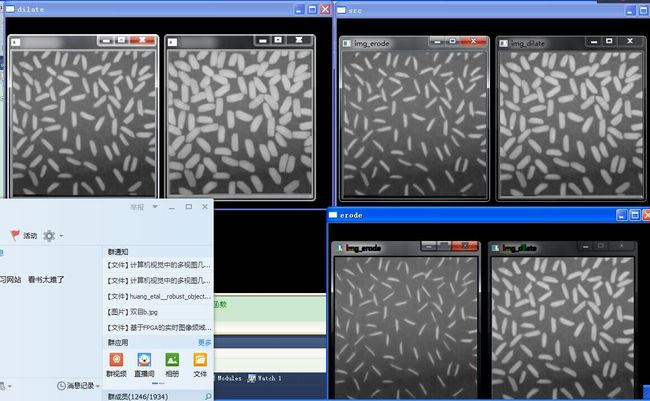
} 膨胀腐蚀
膨胀就是大了一圈 腐蚀就是小了一圈
#include
using namespace cv;
using namespace std;
int main(int argc, char *argv[])
{
Mat src, erode_dst, dilate_dst;
src = imread("f:\\img\\erode.png");
if (!src.data) {
cout<<"Read image failure."< 开闭2
#include
#include
#include
#include
IplImage* src = 0;
IplImage* dst = 0;
IplConvKernel* element = 0;
int element_shape = CV_SHAPE_RECT;
//the address of variable which receives trackbar position update
int max_iters = 10;
int open_close_pos = 0;
int erode_dilate_pos = 0;
// callback function for open/close trackbar
void OpenClose(int pos)
{
int n = open_close_pos - max_iters;
int an = n > 0 ? n : -n;
element = cvCreateStructuringElementEx( an*2+1, an*2+1, an, an, element_shape, 0 );
if( n < 0 )
{
cvErode(src,dst,element,1);
cvDilate(dst,dst,element,1);
}
else
{
cvDilate(src,dst,element,1);
cvErode(dst,dst,element,1);
}
cvReleaseStructuringElement(&element);
cvShowImage("Open/Close",dst);
}
// callback function for erode/dilate trackbar
void ErodeDilate(int pos)
{
int n = erode_dilate_pos - max_iters;
int an = n > 0 ? n : -n;
element = cvCreateStructuringElementEx( an*2+1, an*2+1, an, an, element_shape, 0 );
if( n < 0 )
{
cvErode(src,dst,element,1);
}
else
{
cvDilate(src,dst,element,1);
}
cvReleaseStructuringElement(&element);
cvShowImage("Erode/Dilate",dst);
}
int main( int argc, char** argv )
{
char* filename = "f:\\img\\oc.png";
if( (src = cvLoadImage(filename,1)) == 0 )
return -1;
printf( "Hot keys: \n"
"\tESC - quit the program\n"
"\tr - use rectangle structuring element\n"
"\te - use elliptic structuring element\n"
"\tc - use cross-shaped structuring element\n"
"\tENTER - loop through all the options\n" );
dst = cvCloneImage(src);
//create windows for output images
cvNamedWindow("Open/Close",1);
cvNamedWindow("src",1);
cvShowImage("src",src);
cvNamedWindow("Erode/Dilate",1);
open_close_pos = erode_dilate_pos = max_iters;
cvCreateTrackbar("iterations", "Open/Close",&open_close_pos,max_iters*2+1,OpenClose);
cvCreateTrackbar("iterations", "Erode/Dilate",&erode_dilate_pos,max_iters*2+1,ErodeDilate);
for(;;)
{
int c;
OpenClose(open_close_pos);
ErodeDilate(erode_dilate_pos);
c = cvWaitKey(0);
if( (char)c == 27 )
break;
if( (char)c == 'e' )
element_shape = CV_SHAPE_ELLIPSE;
else if( (char)c == 'r' )
element_shape = CV_SHAPE_RECT;
else if( (char)c == 'c' )
element_shape = CV_SHAPE_CROSS;
else if( (char)c == '\n' )
element_shape = (element_shape + 1) % 3;
}
//release images
cvReleaseImage(&src);
cvReleaseImage(&dst);
//destroy windows
cvDestroyWindow("Open/Close");
cvDestroyWindow("Erode/Dilate");
return 0;
}
距离变换
#include "opencv\\cv.h"
#include "opencv\\highgui.h"
#include
char wndname[] = "Distance transform";
char tbarname[] = "Threshold";
int mask_size = CV_DIST_MASK_5;
int build_voronoi = 0;
int edge_thresh = 100;
// The output and temporary images
IplImage* dist = 0;
IplImage* dist8u1 = 0;
IplImage* dist8u2 = 0;
IplImage* dist8u = 0;
IplImage* dist32s = 0;
IplImage* gray = 0;
IplImage* edge = 0;
IplImage* labels = 0;
// threshold trackbar callback
void on_trackbar( int dummy )
{
static const uchar colors[][3] =
{
{0,0,0},
{255,0,0},
{255,128,0},
{255,255,0},
{0,255,0},
{0,128,255},
{0,255,255},
{0,0,255},
{255,0,255}
};
int msize = mask_size;
cvThreshold( gray, edge, (float)edge_thresh, (float)edge_thresh, CV_THRESH_BINARY );
if( build_voronoi )
msize = CV_DIST_MASK_5;
cvDistTransform( edge, dist, CV_DIST_L2, msize, NULL, build_voronoi ? labels : NULL );
if( !build_voronoi )
{
// begin "painting" the distance transform result
cvConvertScale( dist, dist, 5000.0, 0 );
cvPow( dist, dist, 0.5 );
cvConvertScale( dist, dist32s, 1.0, 0.5 );
cvAndS( dist32s, cvScalarAll(255), dist32s, 0 );
cvConvertScale( dist32s, dist8u1, 1, 0 );
cvConvertScale( dist32s, dist32s, -1, 0 );
cvAddS( dist32s, cvScalarAll(255), dist32s, 0 );
cvConvertScale( dist32s, dist8u2, 1, 0 );
cvMerge( dist8u1, dist8u2, dist8u2, 0, dist8u );
// end "painting" the distance transform result
}
else
{
int i, j;
for( i = 0; i < labels->height; i++ )
{
int* ll = (int*)(labels->imageData + i*labels->widthStep);
float* dd = (float*)(dist->imageData + i*dist->widthStep);
uchar* d = (uchar*)(dist8u->imageData + i*dist8u->widthStep);
for( j = 0; j < labels->width; j++ )
{
int idx = ll[j] == 0 || dd[j] == 0 ? 0 : (ll[j]-1)%8 + 1;
int b = cvRound(colors[idx][0]);
int g = cvRound(colors[idx][1]);
int r = cvRound(colors[idx][2]);
d[j*3] = (uchar)b;
d[j*3+1] = (uchar)g;
d[j*3+2] = (uchar)r;
}
}
}
cvShowImage( wndname, dist8u );
}
int main( int argc, char** argv )
{
char* filename = "f:\\img\\pf.jpg";
if( (gray = cvLoadImage( filename, 0 )) == 0 )
return -1;
cvNamedWindow( "src", 1 );
cvShowImage( "src", gray );
printf( "Hot keys: \n"
"\tESC - quit the program\n"
"\t3 - use 3x3 mask\n"
"\t5 - use 5x5 mask\n"
"\t0 - use precise distance transform\n"
"\tv - switch Voronoi diagram mode on/off\n"
"\tENTER - loop through all the modes\n" );
dist = cvCreateImage( cvGetSize(gray), IPL_DEPTH_32F, 1 );
dist8u1 = cvCloneImage( gray );
dist8u2 = cvCloneImage( gray );
dist8u = cvCreateImage( cvGetSize(gray), IPL_DEPTH_8U, 3 );
dist32s = cvCreateImage( cvGetSize(gray), IPL_DEPTH_32S, 1 );
edge = cvCloneImage( gray );
labels = cvCreateImage( cvGetSize(gray), IPL_DEPTH_32S, 1 );
cvNamedWindow( wndname, 1 );
cvCreateTrackbar( tbarname, wndname, &edge_thresh, 255, on_trackbar );
for(;;)
{
int c;
// Call to update the view
on_trackbar(0);
c = cvWaitKey(0);
if( (char)c == 27 )
break;
if( (char)c == '3' )
mask_size = CV_DIST_MASK_3;
else if( (char)c == '5' )
mask_size = CV_DIST_MASK_5;
else if( (char)c == '0' )
mask_size = CV_DIST_MASK_PRECISE;
else if( (char)c == 'v' )
build_voronoi ^= 1;
else if( (char)c == '\n' )
{
if( build_voronoi )
{
build_voronoi = 0;
mask_size = CV_DIST_MASK_3;
}
else if( mask_size == CV_DIST_MASK_3 )
mask_size = CV_DIST_MASK_5;
else if( mask_size == CV_DIST_MASK_5 )
mask_size = CV_DIST_MASK_PRECISE;
else if( mask_size == CV_DIST_MASK_PRECISE )
build_voronoi = 1;
}
}
cvReleaseImage( &gray );
cvReleaseImage( &edge );
cvReleaseImage( &dist );
cvReleaseImage( &dist8u );
cvReleaseImage( &dist8u1 );
cvReleaseImage( &dist8u2 );
cvReleaseImage( &dist32s );
cvReleaseImage( &labels );
cvDestroyWindow( wndname );
return 0;
}