Robocode教程5——Enemy类
前面我们讲了第一个机器人Tiny,Tiny是继承自Robot这个类,可以看出Tiny智商有限,而几乎所有的战场机器人都继承自AdvancedRobot类,关于这两个类的区别我们以后再讲。首先我们还是从一个简单的高级机器人讲起。
在这个高级机器人中,首先我们要声明一个Enemy类,Enemy,就是敌人,Enemy类的作用是将敌人的信息封装起来供我们使用。
在onScannedRobot(ScannedRobotEvent e)方法中,雷达每次扫描到敌人时,都会执行这个方法,同时,ScannedRobotEvent e给我们提供了一些关于敌人的信息,这些信息是非常重要的,具体见API中,下图我列出一些
double getDistance() 返回离敌人的距离。
double getEnergy() 返回敌人的能量,由于每发出一个子弹是要消耗能量的,通过对敌人能量的检测,可以判断敌人的开火时间,从而采用相应的躲避策略,这是很普遍的做法。
double getHeading() 返回敌人的Heading,朝向,单位度
double getHeadingRadians() 返回敌人的Heading,朝向,单位弧度
String getName() 返回敌人名字
API中都很详细,大家自己看看吧
有了这些,我们来建立我们的Enemy类,首先分析Enemy有哪些数据成员:
private double x,y; //x,y坐标
private Stringname;//敌人名字
private double headingRadian; //朝向
private double bearingRadian; //相对于‘我’的方向,具体查看bearing和heading的区别
private double distance; //距离
private double direction; //绝对方向
private double velocity; //运动速度
private double energy; //能量值
当然这些都是基础的数据成员,到后面我们需要一些其他成员时可以再添加。
有了成员之后,我们就要考虑怎样给其赋值了,所以第一个成员方法为:
public void update(ScannedRobotEvent e,AdvancedRobot me){
name = e.getName();
headingRadian = e.getHeadingRadians();
bearingRadian = e.getBearingRadians();
this.energy = e.getEnergy();
this.velocity = e.getVelocity();
this.distance = e.getDistance();
direction = bearingRadian + me.getHeadingRadians();
x = me.getX() + Math.sin(direction ) * distance;
y= me.getY() + Math.cos(direction ) * distance;
}
Updata方法的参数有两个,第一个为ScannedRobotEvent e,既扫描事件,包含敌人信息,第二个为AdvancedRobotme,包含‘我’的信息,后面遇到的方法基本上都要包含这两个方法,因为robocode战斗无非就是对‘敌人’和‘我’的数据进行处理。
具体操作都很简单,唯一要注意的是:
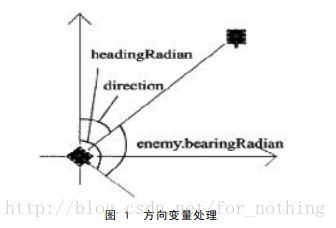
direction = bearingRadian +me.getHeadingRadians();
有一个direction变量,它是很常用的一个变量,几乎所有的中高级机器人都有用到。见图,在图中,因为目标在机器人heading方向的左边,所bearingRadian变量为负。根据此图不难算得directon = bearingRadian + headingRadian。可见direction就是以自己的机器人为圆心,垂直向上为0度,目标相对自己机
器人的角度。
所以我们完整(完整为暂时的,对于我们以后要讲的第一个高级机器已经足够)的Enemy类为:
public class Enemy {
public double x,y;
public Stringname = null;
public double headingRadian = 0.0D;
public double bearingRadian = 0.0D;
public double distance = 1000D;
public double direction = 0.0D;
public double velocity = 0.0D;
public double energy = 100.0D;
public void update(ScannedRobotEvent e,AdvancedRobot me){
name = e.getName();
headingRadian =e.getHeadingRadians();
bearingRadian =e.getBearingRadians();
this.energy = e.getEnergy();
this.velocity = e.getVelocity();
this.distance = e.getDistance();
direction = bearingRadian +me.getHeadingRadians();
x = me.getX() + Math.sin(direction) *distance;
y= me.getY() + Math.cos(direction ) * distance;
}
}