CanFestival移植到STM32F103
1.创建工程
2.将CanFestival源码,拷贝到工程目录
3.删除其它架构和编译器的代码
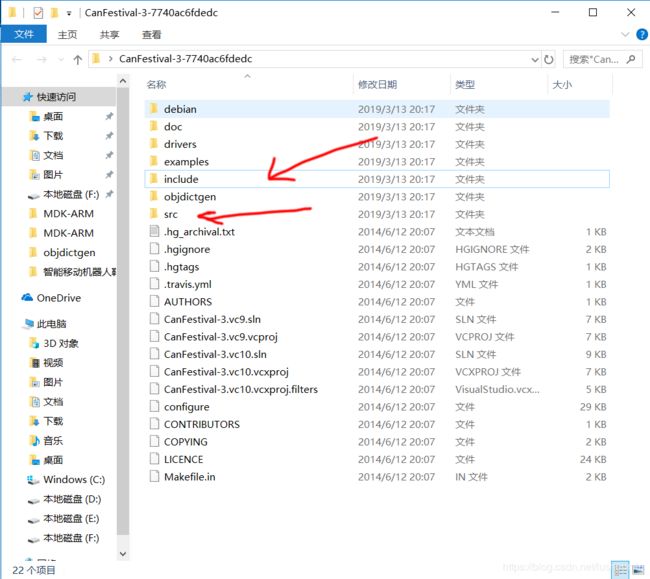
查看include文件夹发现没有cortex-m3架构,因此我们这里借鉴AVR架构进行修改
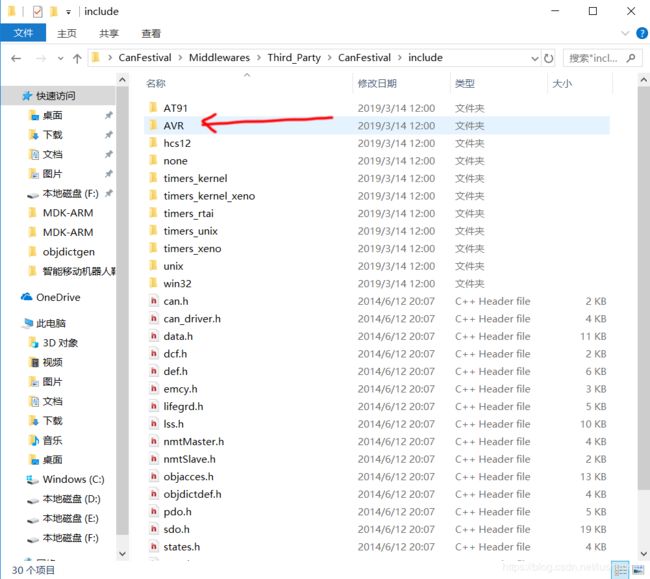
将AVR文件夹重命名为STM32,并删除其它架构文件夹
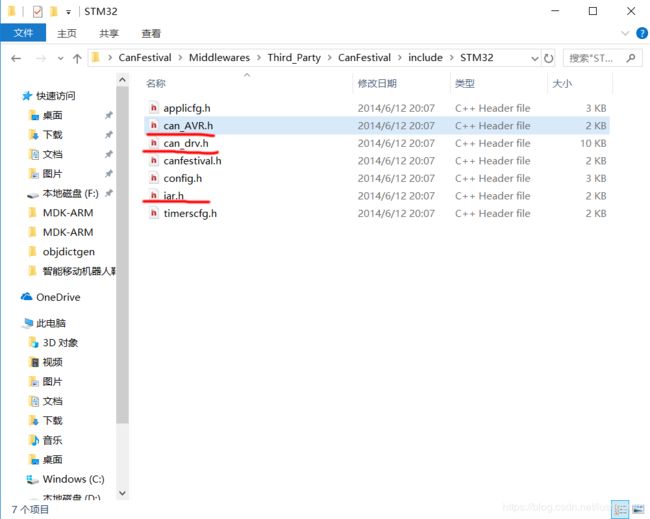
打开STM32文件夹,将里面avr相关的文件删除,我们用的开发环境是MDK,因此将iar相关文件也删了

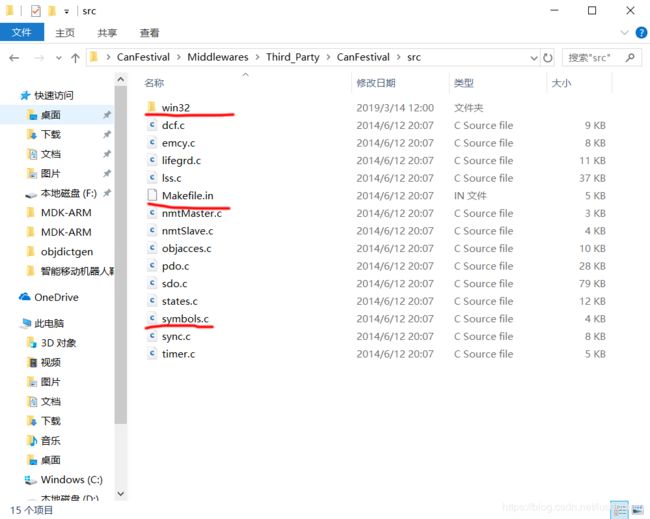
打开src文件夹,将其它架构、编译器和系统的文件给删了
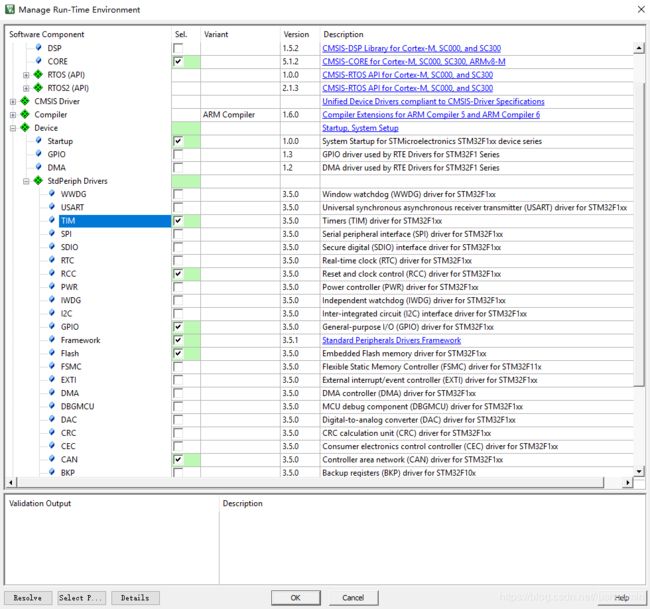
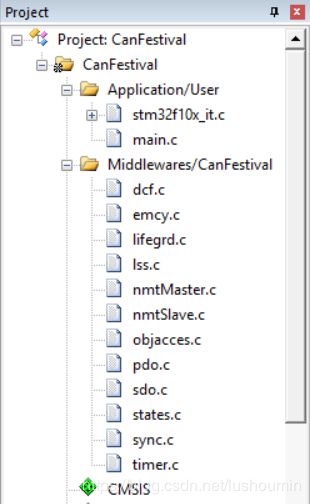
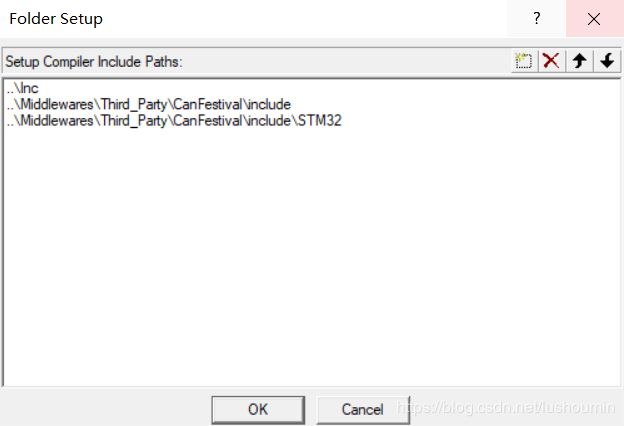
4.将CanFestival文件添加进工程
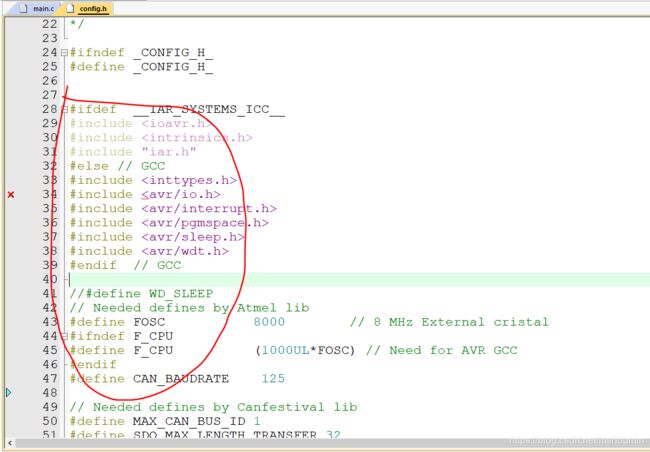
添加好之后,编译出现错误,config文件中包含了很多iar相关头文件

将这些头文件删除
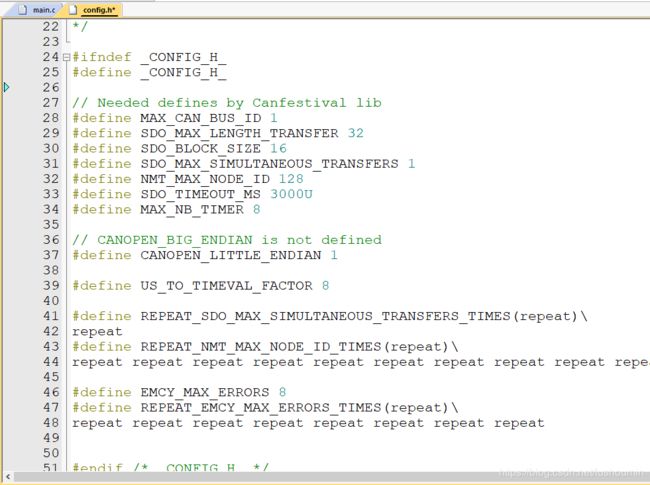
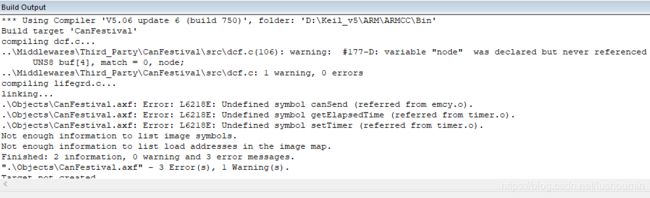
重新编译,依然存在错误,提示有很多函数没有定义
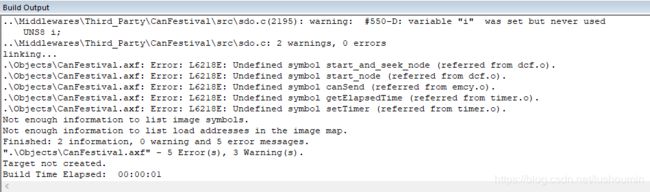
先解决start_and_seek_node和start_node的问题,打开def.c文件发现这两个函数定义了
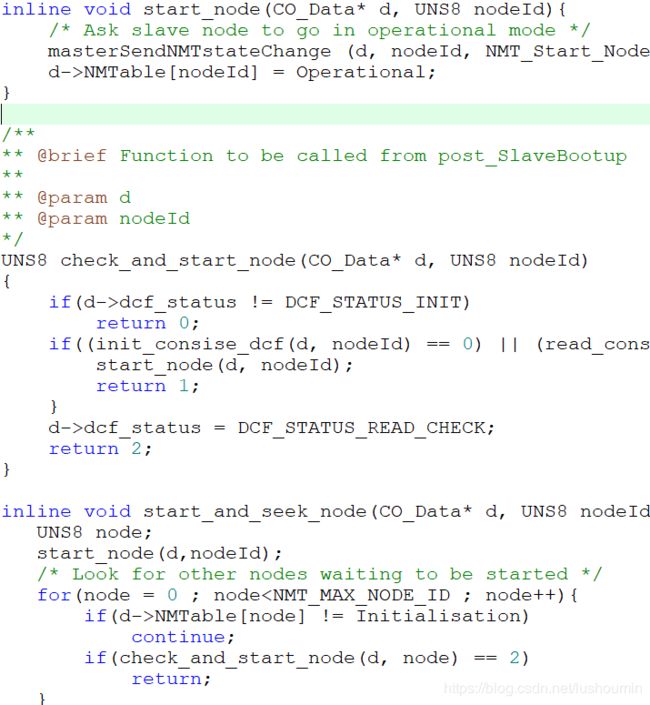
其实,这是MDK开发环境的问题,不要太纠结这个问题,把inline删掉就好了
然后重新编译,还剩下三个错误canSend、getElapsedTime和setTimer没有定义。这三个接口是需要用户移植程序的时候自己进行添加的。
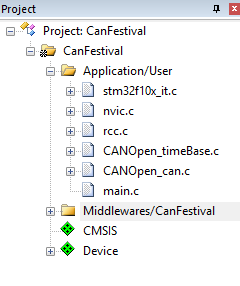
5.添加接口
分别创建rcc.h、rcc.c、nvic.h、nvic.c、CANOpen_can.h、CANOpen_can.c、CANOpen_timeBase.h、CANOpen_timeBase.c文件
/**
***********************************
* 文件名: nvic.h
* 作者: stone
* 版本: V0.1
* 日期: 2018-3-29
* 描述: 设置中断控制器
***********************************
*/
#ifndef __NVIC_H_
#define __NVIC_H_
/* 功能: 中断嵌套控制器配置
参数: 无
返回值:无
*/
void nvic_config(void);
#endif
/**
***********************************
* 文件名: nvic.c
* 作者: stone
* 版本: V0.1
* 日期: 2018-3-29
* 描述: 设置中断控制器
***********************************
*/
#include "stm32f10x.h"
#include "nvic.h"
/* 功能: 中断嵌套控制器配置
参数: 无
返回值:无
*/
void nvic_config(void)
{
/* 选择中断分组4 */
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_4);
}
/**
***********************************
* 文件名:rcc.h
* 作者: stone
* 版本: V0.1
* 日期: 2018-3-29
* 描述: 配置时钟源
***********************************
*/
#ifndef __RCC_H_
#define __RCC_H_
/* 功能: RCC时钟配置
参数: 无
返回值:无
*/
void rcc_config(void);
#endif
/**
***********************************
* 文件名: rcc.c
* 作者: stone
* 版本: V0.1
* 日期: 2018-3-29
* 描述: 配置时钟源
***********************************
*/
#include "stm32f10x.h"
#include "stm32f10x_flash.h"
#include "rcc.h"
/* 功能: RCC时钟配置
参数: 无
返回值:无
*/
void rcc_config(void)
{
ErrorStatus HSEStartUpStatus;
/* RCC寄存器设置为默认配置 */
RCC_DeInit();
/* 打开外部高速时钟 */
RCC_HSEConfig(RCC_HSE_ON);
/* 等待外部高速时钟稳定 */
HSEStartUpStatus = RCC_WaitForHSEStartUp();
if(HSEStartUpStatus == SUCCESS)
{
/* 设置HCLK = SYSCLK */
RCC_HCLKConfig(RCC_SYSCLK_Div1);
/* 设置PCLK2 = HCLK */
RCC_PCLK2Config(RCC_HCLK_Div1);
/* 设置PCLK1 = HCLK / 2 */
RCC_PCLK1Config(RCC_HCLK_Div2);
/* 设置FLASH代码延时 */
FLASH_SetLatency(FLASH_Latency_2);
/* 使能预取址缓存 */
FLASH_PrefetchBufferCmd(FLASH_PrefetchBuffer_Enable);
/* 设置PLL时钟源为HSE倍频9 72MHz */
RCC_PLLConfig(RCC_PLLSource_HSE_Div1, RCC_PLLMul_9);
/* 使能PLL */
RCC_PLLCmd(ENABLE);
/* 等待PLL稳定 */
while(RCC_GetFlagStatus(RCC_FLAG_PLLRDY) == RESET);
/* 设置PLL为系统时钟源 */
RCC_SYSCLKConfig(RCC_SYSCLKSource_PLLCLK);
/* 等待系统时钟源切换到PLL */
while(RCC_GetSYSCLKSource() != 0x08);
/* 设置系统节拍器时钟源为FCLK */
SysTick_CLKSourceConfig(SysTick_CLKSource_HCLK);
}
}
/**
***********************************
* 文件名: CANOpen_timeBase.h
* 作者: stone
* 版本: V0.1
* 日期: 2018-3-29
* 描述: CANOPEN底层定时器接口文件
***********************************
*/
#ifndef __CANOPEN_TIMEBASE_H_
#define __CANOPEN_TIMEBASE_H_
/* 功能: canopen时基配置
参数: 无
返回值:无
*/
void canopen_timebase_config(void);
#endif
/**
***********************************
* 文件名: CANOpen_timeBase.c
* 作者: stone
* 版本: V0.1
* 日期: 2018-3-29
* 描述: CANOPEN底层定时器接口文件
***********************************
*/
#include "stm32f10x.h"
#include "canfestival.h"
#include "CANOpen_timeBase.h"
/* 功能: 定时器配置
参数: 无
返回值:无
*/
static void timer_config(void)
{
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
/* 允许TIM2的时钟 */
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2, ENABLE);
/* 将定时器2寄存器设为初始值 */
TIM_DeInit(TIM2);
/* 设置定时器2由内部时钟 */
TIM_InternalClockConfig(TIM2);
/* 预分频值 */
TIM_TimeBaseStructure.TIM_Prescaler = 72 - 1;
/* 时钟分割 */
TIM_TimeBaseStructure.TIM_ClockDivision = TIM_CKD_DIV1;
/* 向上计数 */
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up;
/* 自动重载值 */
TIM_TimeBaseStructure.TIM_Period = 50000 - 1;
/* 初始化定时器2 */
TIM_TimeBaseInit(TIM2, &TIM_TimeBaseStructure);
/* 清除溢出中断标志 */
TIM_ClearFlag(TIM2, TIM_FLAG_Update);
/* 禁止ARR预装载缓冲器 */
TIM_ARRPreloadConfig(TIM2, DISABLE);
/* 开启TIM2的中断 */
TIM_ITConfig(TIM2, TIM_IT_Update, ENABLE);
/* 开启定时器2 */
TIM_Cmd(TIM2, ENABLE);
}
/* 功能: 中断配置
参数: 无
返回值:无
*/
static void nvic_config(void)
{
NVIC_InitTypeDef NVIC_InitStructure;
/* 选择TIM2的中断通道 */
NVIC_InitStructure.NVIC_IRQChannel = TIM2_IRQn;
/* 抢占式中断优先级设置为2 */
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 2;
/* 响应式中断优先级设置为2 */
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 2;
/* 使能中断 */
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
/* 中断初始化 */
NVIC_Init(&NVIC_InitStructure);
}
/* 功能: canopen时基配置
参数: 无
返回值:无
*/
void canopen_timebase_config(void)
{
/* 定时器配置 */
timer_config();
/* 中断配置 */
nvic_config();
}
/* 功能: 设置定时器触发时间
参数: 定时器触发时间
返回值:无
*/
void setTimer(TIMEVAL value)
{
TIM2->ARR = TIM2->CNT + value;
}
/* 功能: 获取上次触发到现在的流逝时间
参数: 无
返回值:获取计数器值
*/
TIMEVAL getElapsedTime(void)
{
return TIM2->CNT;
}
/* 定时器2中断向量 */
void TIM2_IRQHandler(void)
{
/* 定时器2溢出标志位 */
if(TIM_GetITStatus(TIM2, TIM_IT_Update) != RESET)
{
/* 定时器2清除溢出标志位 */
TIM_ClearITPendingBit(TIM2 , TIM_FLAG_Update);
TimeDispatch();
}
}
/**
***********************************
* 文件名: CANOpen_can.h
* 作者: stone
* 版本: V0.1
* 日期: 2018-3-29
* 描述: CANOPEN协议底层总线接口
***********************************
*/
#ifndef __CANOPEN_CAN_H_
#define __CANOPEN_CAN_H_
/* 功能: can总线配置
参数: 无
返回值:无
*/
void CANOpen_can_config(void);
#endif
/**
***********************************
* 文件名: CANOpen_can.c
* 作者: stone
* 版本: V0.1
* 日期: 2018-3-29
* 描述: CANOPEN协议底层总线接口
***********************************
*/
#include "stm32f10x.h"
#include "CANOpen_can.h"
#include "canfestival.h"
/* CANOPEN字典 */
extern CO_Data masterObjdict_Data;
/* 功能: GPIO配置
参数: 无
返回值:无
*/
static void gpio_config(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
/* 开启GPIO时钟 */
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA | RCC_APB2Periph_AFIO, ENABLE);
/* CAN_RX */
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_11;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU;
GPIO_Init(GPIOA, &GPIO_InitStructure);
/* CAN_TX */
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_12;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_Init(GPIOA, &GPIO_InitStructure);
}
/* 功能: 中断嵌套控制器配置
参数: 无
返回值:无
*/
static void nvic_config(void)
{
NVIC_InitTypeDef NVIC_InitStructure;
/* 设置CAN接收中断,先占优先级2,从站优先级2 */
NVIC_InitStructure.NVIC_IRQChannel = USB_LP_CAN1_RX0_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 2;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 2;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
/* 初始化中断 */
NVIC_Init(&NVIC_InitStructure);
}
/* 功能: CAN总线过滤器配置
参数: 无
返回值:无
*/
static void can_filter_config(void)
{
CAN_FilterInitTypeDef CAN_FilterInitStructure;
/* 配置过滤器0组,配置成标准标识符且低7位都为0时接受 */
CAN_FilterInitStructure.CAN_FilterNumber = 0; /* 设置过滤器组0 */
CAN_FilterInitStructure.CAN_FilterMode = CAN_FilterMode_IdMask; /* 屏蔽模式 */
CAN_FilterInitStructure.CAN_FilterScale = CAN_FilterScale_32bit; /* 32位模式 */
CAN_FilterInitStructure.CAN_FilterMaskIdHigh = 0x0000; /* 在CANOpen中标准标识符的低7位表示节点ID */
CAN_FilterInitStructure.CAN_FilterMaskIdLow = 0x0004; /* 在CANOpen中只用标准标识符,数据帧/远程帧都有 */
CAN_FilterInitStructure.CAN_FilterIdHigh = 0x0000; /* 主节点ID为0 */
CAN_FilterInitStructure.CAN_FilterIdLow = 0x0000; /* 标准帧 */
CAN_FilterInitStructure.CAN_FilterFIFOAssignment = CAN_Filter_FIFO0; /* 过滤器关联到FIFO0 */
CAN_FilterInitStructure.CAN_FilterActivation = ENABLE; /* 使能过滤器 */
CAN_FilterInit(&CAN_FilterInitStructure);
}
/* 功能: can总线配置
参数: 无
返回值:无
*/
void CANOpen_can_config(void)
{
CAN_InitTypeDef CAN_InitStructure;
/* 配置IO */
gpio_config();
/* 中断嵌套控制器配置 */
nvic_config();
/* 配置CAN总线时钟 */
RCC_APB1PeriphClockCmd(RCC_APB1Periph_CAN1, ENABLE);
/* CAN1默认参数 */
CAN_DeInit(CAN1);
/* 将结构体填入默认参数 */
CAN_StructInit(&CAN_InitStructure);
/* 关闭时间触发模式 */
CAN_InitStructure.CAN_TTCM = DISABLE;
/* 关闭自动离线管理 */
CAN_InitStructure.CAN_ABOM = ENABLE;
/* 关闭自动唤醒 */
CAN_InitStructure.CAN_AWUM = ENABLE;
/* 自动重传 */
CAN_InitStructure.CAN_NART = DISABLE;
/* 禁止FIFO溢出时覆盖原报文 */
CAN_InitStructure.CAN_RFLM = DISABLE;
/* 关闭优先级取决于ID */
CAN_InitStructure.CAN_TXFP = DISABLE;
/* 正常模式 */
CAN_InitStructure.CAN_Mode = CAN_Mode_Normal;
/* 设置波特率:36MHz/9/(2+1+1)=1mbps */
CAN_InitStructure.CAN_SJW = CAN_SJW_1tq;
CAN_InitStructure.CAN_BS1 = CAN_BS1_2tq;
CAN_InitStructure.CAN_BS2 = CAN_BS2_1tq;
CAN_InitStructure.CAN_Prescaler = 9;
/* 初始化CAN总线 */
CAN_Init(CAN1, &CAN_InitStructure);
/* CAN总线过滤器配置 */
can_filter_config();
/* 接收挂起中断 */
CAN_ITConfig(CAN1, CAN_IT_FMP0, ENABLE);
}
/* can总线接收中断回调函数 */
void USB_LP_CAN1_RX0_IRQHandler(void)
{
CanRxMsg message;
Message Rx_Message;
/* 接收消息 */
CAN_Receive(CAN1, CAN_FIFO0, &message);
/* 组装canopen数据包 */
Rx_Message.cob_id = message.StdId; /* 功能码和节点ID */
Rx_Message.rtr = (message.RTR == CAN_RTR_DATA) ? 0 : 1; /* 标识符类型 */
Rx_Message.len = message.DLC; /* 数据包长度 */
memcpy(Rx_Message.data, message.Data, message.DLC); /* 数据 */
/* canopen数据包分配处理函数 */
canDispatch(&masterObjdict_Data, &Rx_Message);
}
/* 功能: CAN发送数据函数
参数: notused can总线端口
message canopen数据包
返回值: 0 成功
1 失败
*/
uint8_t canSend(CAN_PORT notused, Message *message)
{
uint32_t i = 0xFFFFFF;
CanTxMsg TxMessage;
uint8_t TransmitMailbox = 0;
/* 组装CAN数据包 */
TxMessage.DLC = message->len; /* 数据长度 */
memcpy(TxMessage.Data, message->data, message->len); /* 数据 */
TxMessage.IDE = CAN_ID_STD; /* 标准ID */
TxMessage.StdId = message->cob_id; /* 标识符 */
TxMessage.RTR = (message->rtr == CAN_RTR_DATA) ? 0 : 2; /* 数据帧 */
/* 发送数据包 */
TransmitMailbox = CAN_Transmit(CAN1, &TxMessage);
/* 等待发送成功 */
while((CAN_TransmitStatus(CAN1, TransmitMailbox) != CANTXOK) && --i);
/* 成功0 超时1 */
return (i != 0) ? 0 : 1;
}
/**
***********************************
* 文件名: main.c
* 作者: stone
* 版本: V0.1
* 日期: 2018-3-29
* 描述: 主文件
***********************************
*/
#include "stm32f10x.h"
#include "rcc.h"
#include "nvic.h"
#include "CANOpen_timeBase.h"
#include "CANOpen_can.h"
/* 主函数 */
int main(void)
{
/* 时钟配置 */
rcc_config();
/* 中断嵌套控制器配置 */
nvic_config();
/* canopen时基配置 */
canopen_timebase_config();
/* can总线配置 */
CANOpen_can_config();
while(1)
{
}
}
添加好之后,重新编译,提示没有定义CANOpen字典

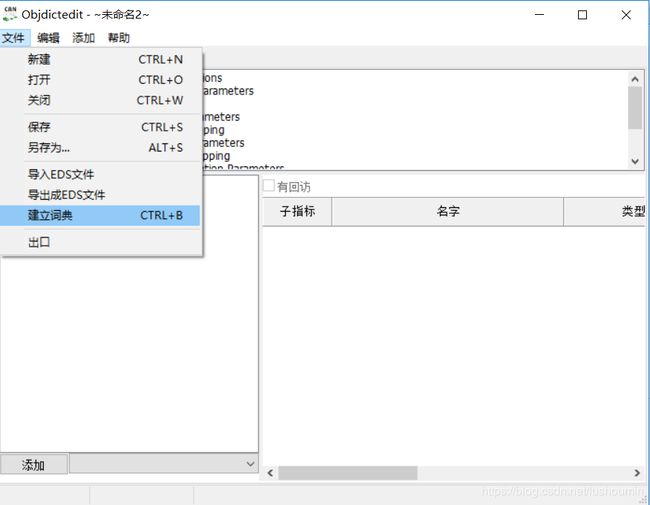
6.创建CANOpen字典
打开objdictedit,创建字典
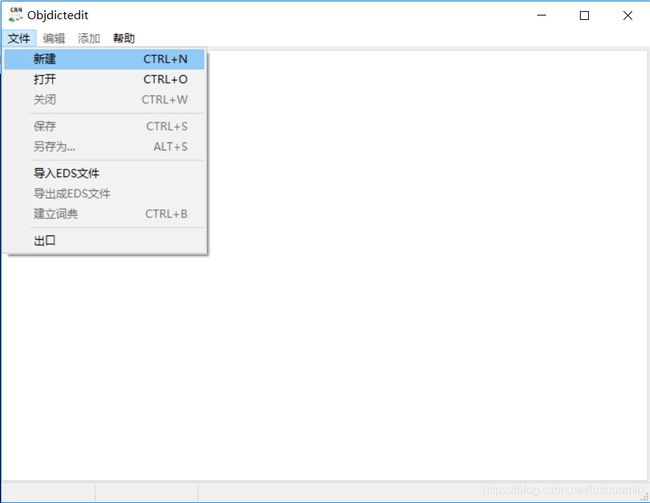

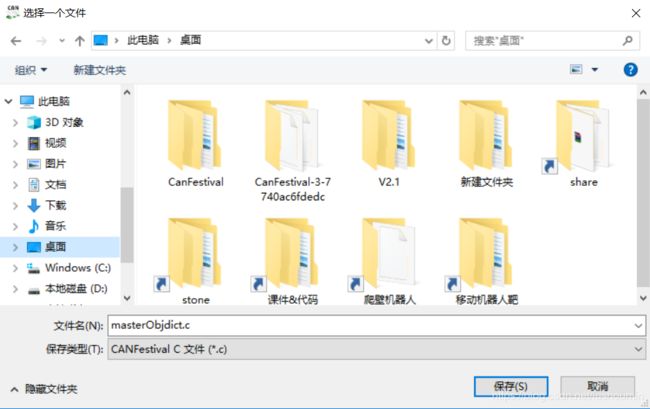
分别得到masterObjdict.h和masterObjdict.c文件

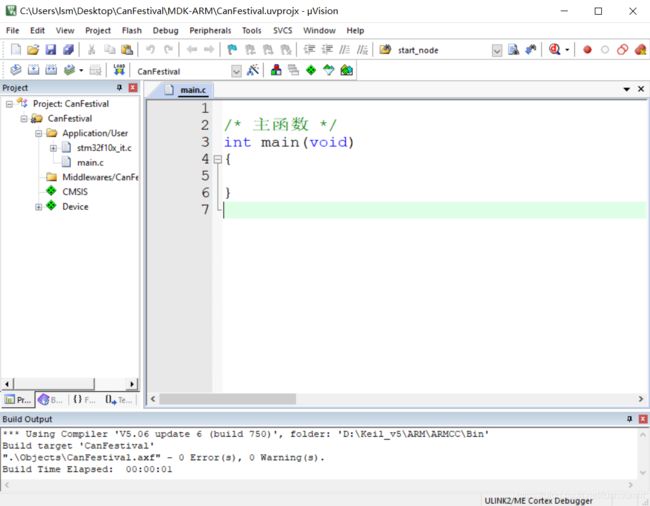
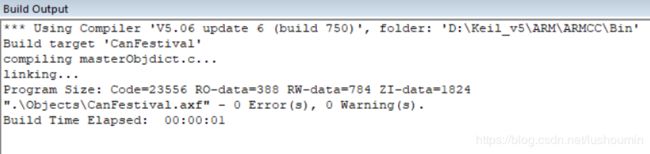
7.将字典文件添加进工程

重新编译,0错误,0警告
8.修改配置
按照CANOpen_timeBase.c的配置,定时器单位计数为1us。打开timerscfg.h。
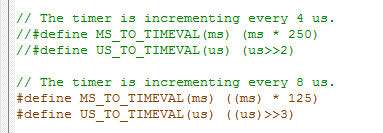
AVR的例程定时器的单位计数时间为8us,我们这里做一个修改。
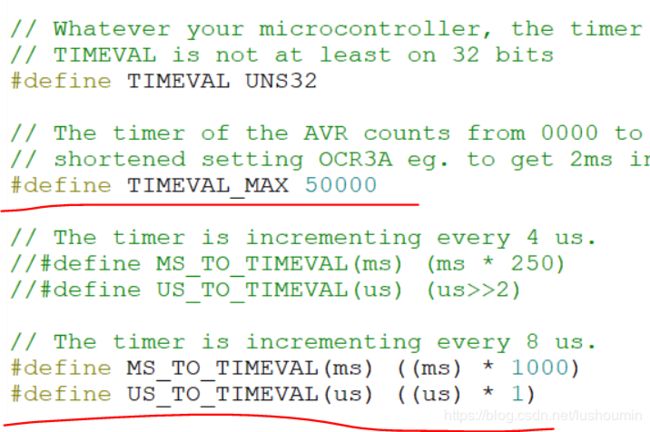
9.协议栈移植工作完成。下面要考虑的就是字典配置和协议栈使用的问题了。