ADC芯片——CS1237的使用
最近看到山西省电子设计大赛的一个题目——自制悬臂梁式简易电子称。具体题目要求如下:
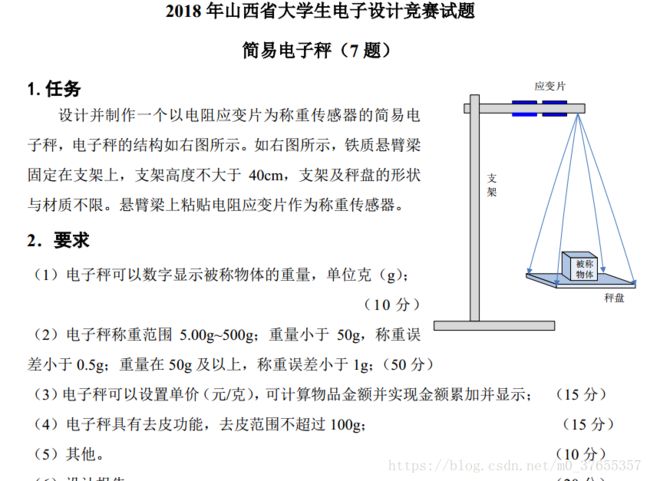
这个题目好像是前年TI杯的一个题目。网上资料也比较多。
觉得这个题目应该很适合练手,于是就搞了一下。查了一番,觉得这个题目中的难点就是那个悬臂梁的制作与应变片的选择。这个应该属于机械、力学专业的人强项,对于我这个学控制的,还是有点挑战性的。那就先不搞传感器。我先自己买了一个商用的称重传感器(500g精度),以此作为标准先来测试我的程序。等程序方面没问题了,在集中精力去制作一个可以与商用传感器媲美的应变片式传感器。
好了,不懂的地方就不多说了,下面介绍一下我的程序思路:
首先传感器我们有了,就是类似与下面的这个东西:

它内部是一个应变片接成的惠斯通电桥,
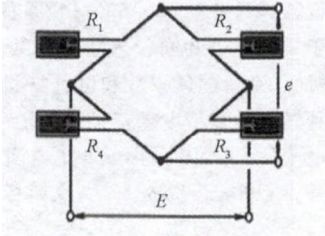
之所以把应变片贴成电桥的形式,其实是为了弥补应变片因温度影响而带来的偏差。同样的温度下,四个应变片的阻值受温度影响的变化是一样的 。这个一样的偏差就被桥式给平衡掉。从而避免了温度的影响。
这个东西能把受力转化为电压差,但是这个电压差非常微小,需要一个放大电路,又因为他是模拟电压,后面需要单片机处理的时候需要转化为数字电压。
所以我选用了CS1237 ADC芯片。它是一款高精度、低功耗 Sigma-Delta 模数转换芯片,内置一路 Sigma-Delta ADC ,一路差分输入通道和一路温度传感器, ADC 采用两阶 sigma delta 调制器,通过低噪声仪用放大器结构实现 PGA 放大,放大倍数可选: 1、 2、 64、 128。在 PGA=128 时,有效分辨率可达 20 位 (工作在 5V)
画的PCB小板:
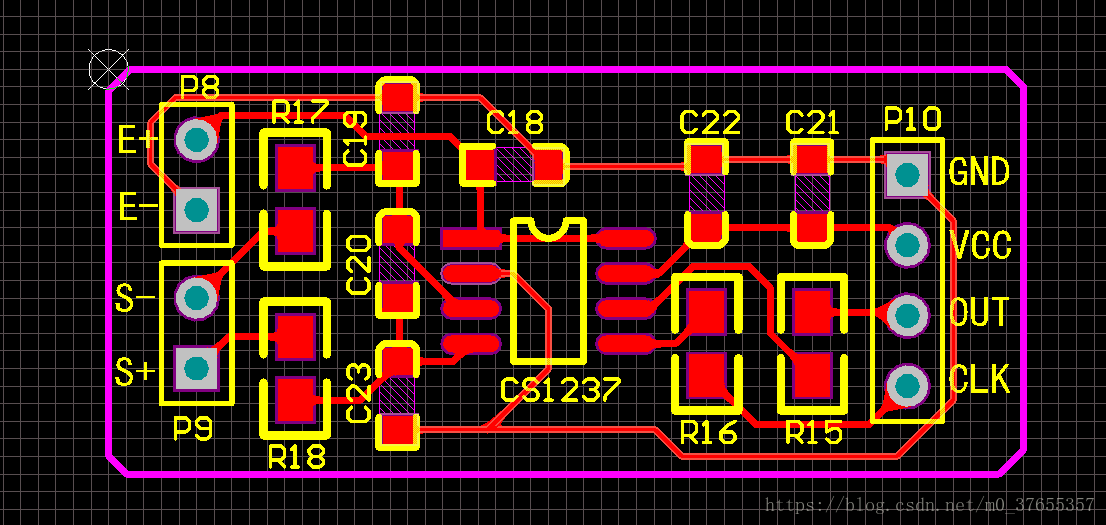
后面就方便了,按照芯片手册给出的通信时序,2线SPI,读取内部转化的24位ADC数值,在按照公式计算出重量即可。
主控:STM32C8T6
LCD触摸屏实时刷新重量
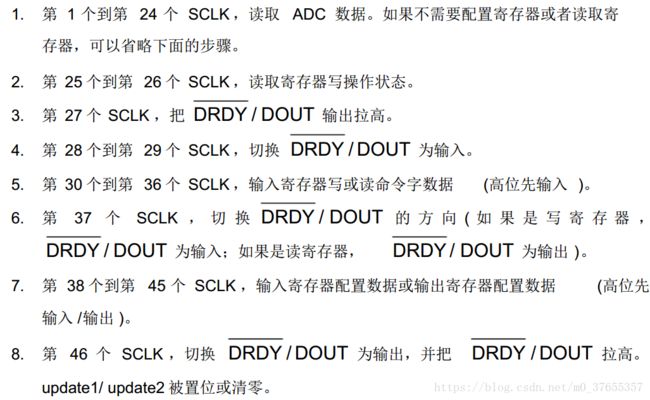
在进行读写CS1237的时候,最重要的又是对其进行功能配置,一旦我们能够成功的配置并读取内部的控制字,那么后面的数据读取就不是问题。
查询芯片手册,可以看到它的功能配置时序图:
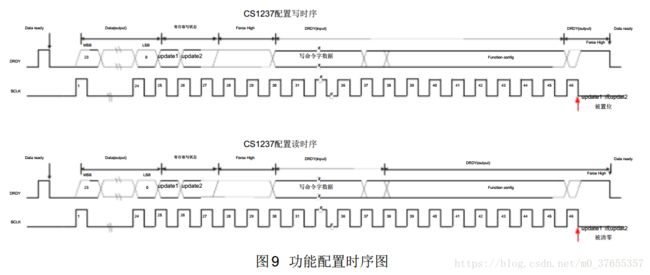
这个时序相对来说还是比较复杂的,因为它不是重复的,它分为以下8步:
我们按照这个要求,就可以比较方便的写出它的功能配置函数了。
//先向cs1237中写入一个控制字
//写控制寄存器地址:0X65
//写入默认控制字:0X0C
void CS1237_write_config(unsigned char config)
{
unsigned char i = 0;
unsigned char _dat = 0x80;
unsigned char count_i = 0;//溢出计时器
SCLK_0;//时钟拉低
mode_IPU();
while(DOUT_IN() == 1)//芯片准备好数据输出,时钟已经为0,数据也需要等CS1237全部拉低为0才算都准备好
{
CS1237_delay_us(5000);
count_i++;
if(count_i > 150)
{
SCLK_1;
DOUT_1;
return;//超时,则直接退出程序
}
}
for(i=0;i<29;i++)// 1 - 29
{
One_CLK();
}
mode_Out_PP();
//第30-36个时钟周期,输入寄存器的写或读命令字数据(高位先输入),这里是写,应输入0x65
SCLK_1;CS1237_delay_us(30);DOUT_1;SCLK_0;CS1237_delay_us(30);//30
SCLK_1;CS1237_delay_us(30);DOUT_1;SCLK_0;CS1237_delay_us(30);//31
SCLK_1;CS1237_delay_us(30);DOUT_0;SCLK_0;CS1237_delay_us(30);//32
SCLK_1;CS1237_delay_us(30);DOUT_0;SCLK_0;CS1237_delay_us(30);//33
SCLK_1;CS1237_delay_us(30);DOUT_1;SCLK_0;CS1237_delay_us(30);//34
SCLK_1;CS1237_delay_us(30);DOUT_0;SCLK_0;CS1237_delay_us(30);//35
SCLK_1;CS1237_delay_us(30);DOUT_1;SCLK_0;CS1237_delay_us(30);//36
One_CLK();//37,切换DOUT的方向
for(i=0;i<8;i++)// 38 - 45个脉冲,写入寄存器的配置数据(高位先写入)
{
SCLK_1;CS1237_delay_us(40);
if((config & _dat) != 0)
DOUT_1;
else
DOUT_0;
SCLK_0;CS1237_delay_us(40);
_dat >>= 1;
}
One_CLK();//46个脉冲,切换DOUT引脚,并且拉高DOUT引脚
}其中最重要的是DOUT管脚的配置。因为他是双向管脚。
在输出的时候需要配置成推挽输出,读取的时候配成上拉输入。
但是要注意这里不能使用开漏加外部上拉电阻的形式,虽然在之前我用这种方式配置过双向IO口,但是不知道为什么,在这个芯片上面不能用。读不出数据。
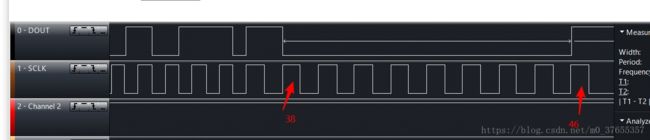
我用逻辑分析仪看了波形之后,才发现时序在第38-46个时钟周期内,DOUT引脚没有反应。无法被拉高。
但是上面那个程序是能够与CS1237正常通信的。
建立了通信之后,就是读取内部寄存器存储的ADC数值了:
/*
** 读取ADC数据,返回一个有符号数据
** 之前程序中是延时40us,输出数据有点慢,现改为延时10us,测试可以正常读出数据
*/
long int CS1237_Read_ADC(void)
{
unsigned char i = 0;
long int dat = 0;
unsigned char count_i = 0;
SCLK_0;
mode_IPU();
while(DOUT_IN() == 1)
{
CS1237_delay_us(5000);
count_i++;
if(count_i > 150)
{
SCLK_1;
DOUT_1;
return 0;//超时,则直接退出程序
}
}
//获取24位有效转换
for(i = 0; i<24; i++)
{
SCLK_1;
CS1237_delay_us(10);
dat <<= 1;
if(DOUT_IN() == 1)
dat++;
SCLK_0;CS1237_delay_us(10);
}
//一共需要输入27个脉冲
for(i=0; i<3; i++)
One_CLK();
mode_Out_PP();
DOUT_1;
i = 24 - ADC_BIT;
dat >>= i; //丢弃多余的位数
return dat;
}这里读出的是20位的ADC原始数据,离我们想要的重量数据还是有一定的差距。
把读取的数据用波形显示出来,可以发现增加砝码的时候数据的抖动还是非常大的。
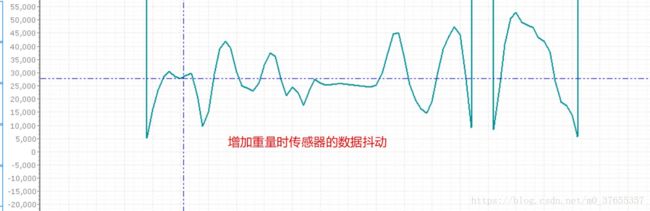
所以我选择先对数据进行低通滤波,消抖滤波。让数据能很快的稳定下来。
其中消抖滤波部分:
long int filter_eliminate_dithering(long int value)
{
long int count = 0;
long int new_value = 0;
new_value = CS1237_Read_18bit_ADC();
while (value != new_value)
{
count++;
if (count >= N)
return new_value;
new_value = CS1237_Read_18bit_ADC();
}
return value;
} 思想就是对比几次输出的值,在一定的输出个数内,如果是不一样的,就更新数据,否则保持原始数据不变。
得到了稳定的ADC数据之后,就可以将ADC数据转化为重量了。
转化为重量的前提是传感器输出的数据和增加的重量是线性变化的。
那么就可以根据两点直线法,先读出一个没加重物的ADC值,在读出一个加了500g重物的ADC值,根据这两个点就可以确定一个线性关系。后面读出的ADC数据都可以根据这个线性关系进行结算重量。
感觉原理一旦说出来,逼格突然降低了好几个档次。。。。
//根据ADC值计算实际重量
float get_weight(void)
{
float dat = 0;
unsigned long int dat_2 = 0;
float dat_3 = 0;
//读取ADC,并转化为单位:克
dat = filter_eliminate_dithering(CS1237_Read_18bit_ADC());
dat *= weight_coe;
dat -= empty_coe;
if(dat < 0)
dat = 0;
//前面K放大了1000倍,这里先除10,为了小数点后面的四舍五入
dat_2 = dat / 10;
//dat_2 /= 100;
if(dat_2 % 100 > 5)
{
dat_2 /= 10;
dat_2 += 1;
}
else
dat_2 /= 10;
//转换为小数输出
dat_3 = (float)dat_2 / 10.00f;
return dat_3;
}上面这段程序在计算重量的时候,同时进行了数据的保留一位小数点和四舍五入。
最后吧这个数据输出到触摸屏上即可。
感觉废话说的太多了,下一篇再聊关于LCD触摸屏的相关操作吧。