- 【Python高阶篇】探索人工智能:使用Python构建一个简单的聊天机器人
码农必胜客
python人工智能机器人
人工智能是计算机科学中一个非常热门的领域,近年来得到了越来越多的关注。它通过模拟人类思考过程和智能行为来实现对复杂任务的自主处理和学习,已经被广泛应用于许多领域,包括语音识别、自然语言处理、机器人技术、图像识别和推荐系统等。本文将介绍如何使用Python构建一个简单的聊天机器人,以展示人工智能的基本原理和应用。我们将使用Python语言和自然语言处理库来构建一个聊天机器人,该机器人可以接收用户的输
- 代码随想录1.25
我会非常幸运
代码随想录跟练记录哈希算法散列表算法数据结构c++力扣
文章目录哈希表理论242.有效的字母异位词349.两个数组的交集202.快乐数1.两数之和哈希表理论什么时候使用哈希法,当我们需要查询一个元素是否出现过,或者一个元素是否在集合里的时候,就要第一时间想到哈希法。哈希表结构:数组,集合,映射数组就是简单的哈希表,但是数组的大小可不是无限开辟的哈希函数哈希碰撞(拉链法、线性探测法)242.有效的字母异位词就是将字母映射到record数组中,数组的位置记
- python程序发钉钉消息
乌11111
python
参考:使用python通过接口方式发送钉钉消息分两步:1.在钉钉群---智能群助手里添加机器人,拿到webhook链接,设置关键词。2.写python代码,用requests请求接口的方式。参考代码和实现结果如下。#python发钉钉消息importjson,requestsdefsendDing(msg):dingding_url='https://oapi.dingtalk.com/robot
- 深度ResUnet与ResUnet++:新一代的语义分割神器
倪澄莹George
深度ResUnet与ResUnet++:新一代的语义分割神器去发现同类优质开源项目:https://gitcode.com/在这个数据驱动的时代,深度学习模型在图像处理领域展现出了强大的潜力,尤其是在语义分割任务中。今天,我们向您推荐一个基于PyTorch实现的开源项目——DeepResUnet和ResUnet++。这两个模型源自于学术界的最新研究,旨在提高图像分割的准确性和效率。项目介绍这个开源
- 【Vue入门实践】Element-UI 树形组件el-tree的组件封装 =>实现组织机构树Tree => 使用vue-content-menu定制可编辑树结构editableTree
小白Rachel
前端工作日记随笔Vue项目实战elementUI组件优化vue.jsuielementuiel-tree组织机构树
文章资源连接(如果需要付费,联系我修改即可):https://download.csdn.net/download/Sabrina_cc/87607289好吧吐槽一下,公司决定之后的技术栈都是vue了,我又从React转战回来了。干巴爹好的生活方式,是和一群志同道合的人,一起奔跑在理想的路上!回头有一路的故事,低头有坚定的脚步,抬头有清晰的远方。首先了解Element-UI中定义的基础Tree树组
- Python实现聊天机器人(基于ChatterBot)
Lemonlittle
python开发语言
废话不多说,直接上正题。使用Python中的ChatterBot和Spacy库编写的简单聊天机器人:首先,需要安装ChatterBot和Spacy库,可以使用以下命令:复制插入pipinstallchatterbotpipinstallspacypython-mspacydownloaden_core_web_sm复制插入接下来,我们需要导入所需的库:python复制插入fromchatterbo
- 深度剖析 Rancher:一站式容器管理与编排平台
恩爸编程
dockerrancherRancher是什么Rancher作用Rancher使用Rancher概念
深度剖析Rancher:一站式容器管理与编排平台一、引言在当今数字化转型加速的时代,容器技术已成为构建和部署现代应用的基石。随着容器化应用的规模不断扩大以及复杂性日益增加,高效的管理与编排工具成为企业的迫切需求。Rancher应运而生,作为一款领先的开源容器管理平台,它不仅提供了强大的功能来简化容器的部署、管理和监控,还支持多种容器编排引擎,如Kubernetes、DockerSwarm等,为企业
- Avalonia+ReactiveUI跨平台路由:打造丝滑UI交互的奇幻冒险
步、步、为营
ui交互.netc#
一、引言在当今数字化时代,跨平台应用开发已成为大势所趋。开发者们迫切需要一种高效、灵活的方式,能够让应用程序在不同操作系统上无缝运行,为用户提供一致的体验。Avalonia和ReactiveUI的组合,宛如一对天作之合的舞者,在跨平台开发的舞台上翩翩起舞,为我们带来了前所未有的可能。Avalonia是一个开源的跨平台UI框架,它以其强大的跨平台能力而备受瞩目。无论是Windows、Linux还是m
- 从入门到精通:HttpClient深度剖析与实战指南
步、步、为营
c#.netcoreasp.net微服务
一、引言1.1背景引入在当今数字化时代,网络编程已成为软件开发中不可或缺的一部分。而HTTP通信作为网络编程的核心,承担着客户端与服务器之间数据传输的重任。无论是Web应用、移动应用,还是分布式系统,HTTP协议都扮演着关键角色,它使得不同设备、不同平台之间能够高效地进行数据交互。在Java开发领域,为了实现HTTP通信,我们有众多工具可供选择,其中ApacheHttpClient脱颖而出,成为开
- 人形机器人的组成原理、相关技术和行业应用
weixin_30777913
机器人
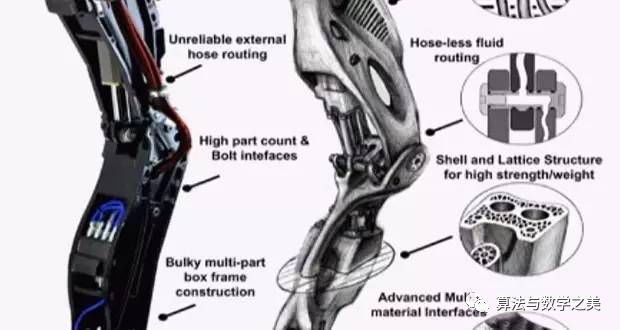
人形机器人的部件和工作原理人形机器人的部件通常包括机身、关节、传感器、驱动器、控制器等。其工作原理是通过传感器收集环境信息,控制器根据预设的算法和程序生成动作指令,驱动器驱动关节运动,从而实现机器人的各种动作。人形机器人主要由以下几个部件组成:伺服电机:在自动控制系统中,伺服电机作为执行元件,将接收到的电信号转换为电动机轴上的角位移或角速度输出。在人形机器人中,伺服电机是驱动各个关节运动的核心部件
- OpenHarmony 5.0.2 Release来了!
MardaWang
版本概述OpenHarmony5.0.2Release版本对标准系统的能力进行持续完善,以快速迭代的方式推出API14,相比5.0.1Release版本,重点做出了如下特性新增或增强:进一步增强ArkUI、图形图像的能力,提供更多组件的高级属性设置,支持更多精致动效;进一步增强Web能力,满足更多应用诉求;针对2in1设备特点,新增一系列窗口管理和控制的能力及窗口生命周期行为管理;新增一批企业定制
- [每周一更]-(第121期):模拟面试|微服务架构面试思路解析
ifanatic
每周一更Go面试架构面试微服务
这一系列针对Go面试题整理,仅供参考文章目录00|综合服务治理方案:怎么保证微服务应用的高可用?1.**什么是微服务架构?**2.**怎么保证微服务架构的高可用?**3.**怎么判定服务是否已经健康?**4.**如果服务不健康该怎么办?**5.**怎么判定服务已经从不健康状态恢复过来了?**6.**Redis崩溃时如何处理?**7.**Kafka崩溃时如何处理?**8.**设计开放平台时需要考虑哪
- 探秘数据仓库新势力:网络建模
秉寒
数据仓库
引言在数据如洪流般奔涌的时代,数据仓库作为企业数据管理和分析的核心枢纽,其建模技术也在不断革新。传统的数据仓库建模方式,如星型模型、雪花模型,曾为企业的数据组织和分析立下汗马功劳,但随着业务的日益复杂和数据关系的千变万化,它们逐渐显露出一定的局限性。而网络建模作为数据仓库领域的新名词,正以其独特的魅力和强大的功能,成为数据仓库技术发展的新方向。网络建模:打破传统的枷锁传统建模的局限传统的数据仓库建
- 时代新起点,点燃 AI 潜能,数万精英共赴生成式 AI 速成之旅
指剑
AmazonWebServices(AWS)人工智能亚马逊云科技云计算羊毛白嫖
点燃AI潜能,数万精英共赴生成式AI速成之旅引言:把握时代脉搏,成就AI未来在这个日新月异的数字时代,生成式AI如同一颗璀璨的北极星,照亮了无数企业和个人的前进道路。它不仅是技术革新的旗帜,更是推动行业创新的核心引擎。亚马逊云科技洞悉这一趋势,推出了极具前瞻性的「生成式AI精英速成计划」,为您开启通往AI时代的快车道。亮眼成果:万人参与,千人认证自项目启动以来,我们见证了一个令人振奋的里程碑:超过
- 网络安全 | 0day漏洞介绍
Andya_net
网络安全技术web安全安全网络
关注:CodingTechWork引言 在网络安全领域,0day漏洞(Zero-dayVulnerability)是指一个尚未被厂商、开发者或安全人员发现、修复或发布修补程序的安全漏洞。0day漏洞是黑客利用的一个重要攻击工具,因其未被披露或未被修复,给系统和网络带来了极大的安全风险。本博客将详细介绍0day漏洞的原理、危害、常见防护策略和应用场景,帮助大家理解并应对0day漏洞。0day漏洞介
- 科技快讯 | 2025商业新愿景;豆包大模型1.5 Pro正式发布;ChatGPT每月产生260吨二氧化碳
最新科技快讯
科技
巨头扎堆入局,人形机器人量产渐行渐近2025年,人形机器人赛道热度持续升温,工信部《人形机器人创新发展指导意见》指出,2025年人形机器人创新体系初步建立,整机产品实现批量生产,并在多个场景应用。受访人士认为,人形机器人发展类似于智能手机初期,未来将逐步成熟迭代。专家预计,理想人形机器人可能需十年以上时间才能实现。信息来源:证券时报。特朗普考虑让这两人收购TikTok,除了马斯克还有他美国总统特朗
- 招聘 | 具身智能机器人方向全职作者
量子位
关注前沿科技量子位未来同事你好。你知道“具身智能机器人”了吗?是否希望成为这个时代性技术和产品的长期报道者?现在,我们正在招聘这样一位专注于具身智能机器人方向的原创作者。岗位是全职,工作地点base:北京中关村。工作职责:1、关注具身智能领域新动态新进展;2、持续挖掘撰写具身智能独家原创内容;3、与具身智能领域玩家建立良好联系;4、构建体系化认知和行业洞察。岗位要求:1、对具身智能、前沿科技等科技
- 《网络安全之多维护盾:零信任架构、加密矩阵与智能检测的交响制衡》
烁月_o9
网络服务器安全运维密码学
网络安全之多维护盾:零信任架构、加密矩阵与智能检测的交响制衡一、引言在数字化浪潮汹涌澎湃的当下,网络空间已深度渗透到社会的各个层面,成为推动全球经济、文化交流以及科技创新的核心引擎。然而,与之相伴的是网络安全威胁的指数级增长与日益复杂化。恶意黑客攻击、数据泄露事件频发,不仅对企业的生存与发展构成严重威胁,更对个人隐私、国家安全等诸多方面带来了前所未有的挑战。在这样的严峻形势下,构建一套全面、高效且
- 【数据结构】最有效的实现栈和队列的方式(C&C++语言版)
大名顶顶
数据结构数据结构c语言c++程序员计算机编程软件开发
在这个技术飞速发展的时代,掌握基础的数据结构知识是每个程序员必不可少的技能。本文将深入探讨栈和队列这两种线性数据结构,带你了解它们在实际编程中的应用以及如何用C/C++代码实现这些结构的核心操作。我们不仅讲解了栈的后进先出(LIFO)和队列的先进先出(FIFO)原理,还通过实例展示了如何将这两种数据结构结合起来,提升编程效率和解决实际问题的能力⚙️。不论你是编程新手还是经验丰富的开发者,本文都将
- 解锁编程潜能,尽在 www.readview.site
qq_36639841
pythonjavajavascript数据库
在当下这个科技以令人惊叹的速度呈指数级蓬勃发展,数字化浪潮如同汹涌澎湃的洪流,以雷霆万钧之势席卷各行各业的时代大背景下,编程已然实现了华丽转身,蜕变成为一把能够开启无数未知可能之门的神奇金钥匙。回首过往,从那些彻彻底底重塑我们日常生活模式,让便捷触手可得的智能手机应用,到为工业4.0这场波澜壮阔、具有划时代意义的智能化变革注入磅礴动力,驱动工厂系统精密且高效运转的核心代码;再到助力科学家们冲破宇宙
- 计算机毕业设计之jsp影视推荐系统
我的微信bishe911
课程设计java开发语言mysqljsp
随着信息化时代的到来,网络系统都趋向于智能化、系统化,影视推荐系统也不例外,但目前国内的很多行业仍使用人工管理,影视信息量也越来越庞大,人工管理显然已无法应对时代的变化,而影视推荐系统能很好地解决这一问题,轻松的对影视信息进行评分,既能提高用户对影视推荐的了解,又能快捷的查看影视信息,取代人工管理是必然趋势。本影视推荐系统以SSM作为框架,B/S模式以及MySql作为后台运行的数据库。本系统主要包
- 基于大数据的电影数据分析可视化系统设计与应用
AI架构设计之禅
大数据AI人工智能AI大模型应用入门实战与进阶计算科学神经计算深度学习神经网络大数据人工智能大型语言模型AIAGILLMJavaPython架构设计AgentRPA
基于大数据的电影数据分析可视化系统设计与应用作者:禅与计算机程序设计艺术1.背景介绍1.1大数据时代的电影行业随着互联网技术和数字化的发展,电影行业已经进入大数据时代。每天都有海量的电影相关数据在各个平台上生成,包括票房数据、评分数据、影评数据等。这些数据蕴含着巨大的价值,如果能够有效地分析和利用,将为电影行业的发展提供重要的决策支持。1.2电影数据分析与可视化的意义1.2.1洞察电影市场趋势通过
- RPA真的是人工智能吗?
微刻时光
RPA加油站rpa人工智能
1.RPA与AI的定义与区别1.1RPA的定义与特点机器人流程自动化(RoboticProcessAutomation,简称RPA)是一种软件技术,它通过模拟人类用户的操作行为来自动执行重复性、基于规则的任务。RPA的核心特点包括:非侵入性:RPA作为外挂工具部署在客户现有系统上,不影响原有IT基础架构。基于规则的操作:RPA流程必须有明确的、可被数字化的触发指令和输入,不允许出现无法提前定义的例
- 影刀 RPA:企业数字化转型的强大引擎
RPA李老师
rpa
一、影刀RPA是什么影刀RPA是一种基于机器学习和人工智能技术的自动化工具,它在当今数字化时代发挥着重要作用。影刀RPA是一款软件机器人,能模拟人的各种操作,在任何应用程式上进行鼠标点击、键盘输入、读取信息等自动化操作,释放人非主观决策、逻辑性高、规则性强的工作。在了解影刀RPA之前,我们先来认识一下RPA。RPA是RoboticProcessAutomation(机器人流程自动化)的简称,201
- 如何在WPS/Excel中批量查询手机号码归属地
不吃鱼不吃鱼
wpsexcel
在这个信息化发展时代,无论是企业客服中心、销售团队,经常需要处理大量的电话号码。从客户信息管理到市场调研,再到日常生活中的通讯记录整理,号码归属地的查询成为了不可或缺的一环。然而,手动查询不仅耗时耗力,还容易出错。今天,就让我们一起探索Excel函数库的神奇之处,学习如何利用简单的公式实现号码归属地的自动查询,让数据处理变得更加高效便捷!那么如何使用这个号码归属地查询公式呢?第一步:安装Excel
- 云电脑账号共享,云电脑账号共享的作用
在科技的浪潮中,云电脑正以一种不可阻挡的趋势向前发展。它将不断突破传统电脑的局限,为用户带来更加便捷、高效、智能的数字体验。相信在不久的将来,云电脑将走进千家万户,成为人们生活中不可或缺的一部分,开启一个全新的数字时代。今天小编给大家带来分析云电脑账号共享的作用。云电脑账号共享的作用主要体现在以下几个方面:1.提高资源利用率:通过共享云电脑账号,多个用户可以共同使用同一台云主机的计算资源,从而提高
- [C++技能提升]类注册
Hunter_pcx
工程技能人工智能c++
最近在做AI信息在各个平台流转的框架设计,想要设计一种可以灵活扩展、不改变原有代码的框架,了解到了类注册。具体需求是这样的:AI算法在客户本地电脑和云端都有部署,原先AI在这两个平台下的输出格式并不统一,且每个AI功能都有自己的输出格式,导致两个平台下的AI信息无法共享,带来了计算资源的浪费,管理起来也比较混乱,因此需要一种模式将所有AI输出规范起来。我的解决思路大概就是将所有AI信息都规范输出到
- 云计算的概念与特点:开启数字化时代的新篇章
ivwdcwso
运维云计算
在当今数字化时代,云计算(CloudComputing)已经成为推动技术创新和业务转型的核心力量。无论是大型企业、中小型企业,还是个人用户,云计算都为其提供了高效、灵活和经济的解决方案。本文将深入探讨云计算的概念及其核心特点,帮助读者全面了解这一革命性技术。©ivwdcwso(ID:u012172506)一、云计算的概念云计算是一种基于互联网的计算模式,通过将计算资源(如服务器、存储、网络、数据库
- 激光线扫标定和相机标定:中高级C++程序员与计算机视觉工程师的指南
m0_57781768
数码相机c++计算机视觉
激光线扫标定和相机标定:中高级C++程序员与计算机视觉工程师的指南简介在计算机视觉和机器人领域,激光标定和相机标定是实现高精度测量和检测的关键技术。激光线扫标定和相机标定在许多应用中都是必不可少的,如自动驾驶、工业检测、三维重建等。本文将详细介绍激光线扫标定和相机标定的基本概念、实现细节以及常见问题的解决方案。目标读者为中高级C++程序员和计算机视觉工程师,文章将提供详细的技术细节和代码示例,确保
- C#在软件定义无线电(SDR)开发中的革命性应用——从概念到实践的全面解析
墨夶
C#学习资料2c#网络开发语言
在这个数字化与无线通信飞速发展的时代,软件定义无线电(SoftwareDefinedRadio,SDR)作为一项关键技术,正在改变着我们对传统无线电系统的认知。它不仅允许工程师们以软件的方式实现复杂的信号处理算法,而且还为各种新型无线应用提供了无限可能。然而,要真正驾驭这项技术并非易事,尤其是在选择合适的编程语言时更是如此。今天,我们将聚焦于C#这一强大而灵活的语言,探讨它是如何成为SDR开发的理
- 矩阵求逆(JAVA)利用伴随矩阵
qiuwanchi
利用伴随矩阵求逆矩阵
package gaodai.matrix;
import gaodai.determinant.DeterminantCalculation;
import java.util.ArrayList;
import java.util.List;
import java.util.Scanner;
/**
* 矩阵求逆(利用伴随矩阵)
* @author 邱万迟
- 单例(Singleton)模式
aoyouzi
单例模式Singleton
3.1 概述 如果要保证系统里一个类最多只能存在一个实例时,我们就需要单例模式。这种情况在我们应用中经常碰到,例如缓存池,数据库连接池,线程池,一些应用服务实例等。在多线程环境中,为了保证实例的唯一性其实并不简单,这章将和读者一起探讨如何实现单例模式。 3.2
- [开源与自主研发]就算可以轻易获得外部技术支持,自己也必须研发
comsci
开源
现在国内有大量的信息技术产品,都是通过盗版,免费下载,开源,附送等方式从国外的开发者那里获得的。。。。。。
虽然这种情况带来了国内信息产业的短暂繁荣,也促进了电子商务和互联网产业的快速发展,但是实际上,我们应该清醒的看到,这些产业的核心力量是被国外的
- 页面有两个frame,怎样点击一个的链接改变另一个的内容
Array_06
UIXHTML
<a src="地址" targets="这里写你要操作的Frame的名字" />搜索
然后你点击连接以后你的新页面就会显示在你设置的Frame名字的框那里
targerts="",就是你要填写目标的显示页面位置
=====================
例如:
<frame src=&
- Struts2实现单个/多个文件上传和下载
oloz
文件上传struts
struts2单文件上传:
步骤01:jsp页面
<!--在进行文件上传时,表单提交方式一定要是post的方式,因为文件上传时二进制文件可能会很大,还有就是enctype属性,这个属性一定要写成multipart/form-data,不然就会以二进制文本上传到服务器端-->
<form action="fileUplo
- 推荐10个在线logo设计网站
362217990
logo
在线设计Logo网站。
1、http://flickr.nosv.org(这个太简单)
2、http://www.logomaker.com/?source=1.5770.1
3、http://www.simwebsol.com/ImageTool
4、http://www.logogenerator.com/logo.php?nal=1&tpl_catlist[]=2
5、ht
- jsp上传文件
香水浓
jspfileupload
1. jsp上传
Notice:
1. form表单 method 属性必须设置为 POST 方法 ,不能使用 GET 方法
2. form表单 enctype 属性需要设置为 multipart/form-data
3. form表单 action 属性需要设置为提交到后台处理文件上传的jsp文件地址或者servlet地址。例如 uploadFile.jsp 程序文件用来处理上传的文
- 我的架构经验系列文章 - 前端架构
agevs
JavaScriptWeb框架UIjQuer
框架层面:近几年前端发展很快,前端之所以叫前端因为前端是已经可以独立成为一种职业了,js也不再是十年前的玩具了,以前富客户端RIA的应用可能会用flash/flex或是silverlight,现在可以使用js来完成大部分的功能,因此js作为一门前端的支撑语言也不仅仅是进行的简单的编码,越来越多框架性的东西出现了。越来越多的开发模式转变为后端只是吐json的数据源,而前端做所有UI的事情。MVCMV
- android ksoap2 中把XML(DataSet) 当做参数传递
aijuans
android
我的android app中需要发送webservice ,于是我使用了 ksop2 进行发送,在测试过程中不是很顺利,不能正常工作.我的web service 请求格式如下
[html]
view plain
copy
<Envelope xmlns="http://schemas.
- 使用Spring进行统一日志管理 + 统一异常管理
baalwolf
spring
统一日志和异常管理配置好后,SSH项目中,代码以往散落的log.info() 和 try..catch..finally 再也不见踪影!
统一日志异常实现类:
[java]
view plain
copy
package com.pilelot.web.util;
impor
- Android SDK 国内镜像
BigBird2012
android sdk
一、镜像地址:
1、东软信息学院的 Android SDK 镜像,比配置代理下载快多了。
配置地址, http://mirrors.neusoft.edu.cn/configurations.we#android
2、北京化工大学的:
IPV4:ubuntu.buct.edu.cn
IPV4:ubuntu.buct.cn
IPV6:ubuntu.buct6.edu.cn
- HTML无害化和Sanitize模块
bijian1013
JavaScriptAngularJSLinkySanitize
一.ng-bind-html、ng-bind-html-unsafe
AngularJS非常注重安全方面的问题,它会尽一切可能把大多数攻击手段最小化。其中一个攻击手段是向你的web页面里注入不安全的HTML,然后利用它触发跨站攻击或者注入攻击。
考虑这样一个例子,假设我们有一个变量存
- [Maven学习笔记二]Maven命令
bit1129
maven
mvn compile
compile编译命令将src/main/java和src/main/resources中的代码和配置文件编译到target/classes中,不会对src/test/java中的测试类进行编译
MVN编译使用
maven-resources-plugin:2.6:resources
maven-compiler-plugin:2.5.1:compile
&nbs
- 【Java命令二】jhat
bit1129
Java命令
jhat用于分析使用jmap dump的文件,,可以将堆中的对象以html的形式显示出来,包括对象的数量,大小等等,并支持对象查询语言。 jhat默认开启监听端口7000的HTTP服务,jhat是Java Heap Analysis Tool的缩写
1. 用法:
[hadoop@hadoop bin]$ jhat -help
Usage: jhat [-stack <bool&g
- JBoss 5.1.0 GA:Error installing to Instantiated: name=AttachmentStore state=Desc
ronin47
进到类似目录 server/default/conf/bootstrap,打开文件 profile.xml找到: Xml代码<bean
name="AttachmentStore"
class="org.jboss.system.server.profileservice.repository.AbstractAtta
- 写给初学者的6条网页设计安全配色指南
brotherlamp
UIui自学ui视频ui教程ui资料
网页设计中最基本的原则之一是,不管你花多长时间创造一个华丽的设计,其最终的角色都是这场秀中真正的明星——内容的衬托
我仍然清楚地记得我最早的一次美术课,那时我还是一个小小的、对凡事都充满渴望的孩子,我摆放出一大堆漂亮的彩色颜料。我仍然记得当我第一次看到原色与另一种颜色混合变成第二种颜色时的那种兴奋,并且我想,既然两种颜色能创造出一种全新的美丽色彩,那所有颜色
- 有一个数组,每次从中间随机取一个,然后放回去,当所有的元素都被取过,返回总共的取的次数。写一个函数实现。复杂度是什么。
bylijinnan
java算法面试
import java.util.Random;
import java.util.Set;
import java.util.TreeSet;
/**
* http://weibo.com/1915548291/z7HtOF4sx
* #面试题#有一个数组,每次从中间随机取一个,然后放回去,当所有的元素都被取过,返回总共的取的次数。
* 写一个函数实现。复杂度是什么
- struts2获得request、session、application方式
chiangfai
application
1、与Servlet API解耦的访问方式。
a.Struts2对HttpServletRequest、HttpSession、ServletContext进行了封装,构造了三个Map对象来替代这三种对象要获取这三个Map对象,使用ActionContext类。
----->
package pro.action;
import java.util.Map;
imp
- 改变python的默认语言设置
chenchao051
python
import sys
sys.getdefaultencoding()
可以测试出默认语言,要改变的话,需要在python lib的site-packages文件夹下新建:
sitecustomize.py, 这个文件比较特殊,会在python启动时来加载,所以就可以在里面写上:
import sys
sys.setdefaultencoding('utf-8')
&n
- mysql导入数据load data infile用法
daizj
mysql导入数据
我们常常导入数据!mysql有一个高效导入方法,那就是load data infile 下面来看案例说明
基本语法:
load data [low_priority] [local] infile 'file_name txt' [replace | ignore]
into table tbl_name
[fields
[terminated by't']
[OPTI
- phpexcel导入excel表到数据库简单入门示例
dcj3sjt126com
PHPExcel
跟导出相对应的,同一个数据表,也是将phpexcel类放在class目录下,将Excel表格中的内容读取出来放到数据库中
<?php
error_reporting(E_ALL);
set_time_limit(0);
?>
<html>
<head>
<meta http-equiv="Content-Type"
- 22岁到72岁的男人对女人的要求
dcj3sjt126com
22岁男人对女人的要求是:一,美丽,二,性感,三,有份具品味的职业,四,极有耐性,善解人意,五,该聪明的时候聪明,六,作小鸟依人状时尽量自然,七,怎样穿都好看,八,懂得适当地撒娇,九,虽作惊喜反应,但看起来自然,十,上了床就是个无条件荡妇。 32岁的男人对女人的要求,略作修定,是:一,入得厨房,进得睡房,二,不必服侍皇太后,三,不介意浪漫蜡烛配盒饭,四,听多过说,五,不再傻笑,六,懂得独
- Spring和HIbernate对DDM设计的支持
e200702084
DAO设计模式springHibernate领域模型
A:数据访问对象
DAO和资源库在领域驱动设计中都很重要。DAO是关系型数据库和应用之间的契约。它封装了Web应用中的数据库CRUD操作细节。另一方面,资源库是一个独立的抽象,它与DAO进行交互,并提供到领域模型的“业务接口”。
资源库使用领域的通用语言,处理所有必要的DAO,并使用领域理解的语言提供对领域模型的数据访问服务。
- NoSql 数据库的特性比较
geeksun
NoSQL
Redis 是一个开源的使用ANSI C语言编写、支持网络、可基于内存亦可持久化的日志型、Key-Value数据库,并提供多种语言的API。目前由VMware主持开发工作。
1. 数据模型
作为Key-value型数据库,Redis也提供了键(Key)和值(Value)的映射关系。除了常规的数值或字符串,Redis的键值还可以是以下形式之一:
Lists (列表)
Sets
- 使用 Nginx Upload Module 实现上传文件功能
hongtoushizi
nginx
转载自: http://www.tuicool.com/wx/aUrAzm
普通网站在实现文件上传功能的时候,一般是使用Python,Java等后端程序实现,比较麻烦。Nginx有一个Upload模块,可以非常简单的实现文件上传功能。此模块的原理是先把用户上传的文件保存到临时文件,然后在交由后台页面处理,并且把文件的原名,上传后的名称,文件类型,文件大小set到页面。下
- spring-boot-web-ui及thymeleaf基本使用
jishiweili
springthymeleaf
视图控制层代码demo如下:
@Controller
@RequestMapping("/")
public class MessageController {
private final MessageRepository messageRepository;
@Autowired
public MessageController(Mes
- 数据源架构模式之活动记录
home198979
PHP架构活动记录数据映射
hello!架构
一、概念
活动记录(Active Record):一个对象,它包装数据库表或视图中某一行,封装数据库访问,并在这些数据上增加了领域逻辑。
对象既有数据又有行为。活动记录使用直截了当的方法,把数据访问逻辑置于领域对象中。
二、实现简单活动记录
活动记录在php许多框架中都有应用,如cakephp。
<?php
/**
* 行数据入口类
*
- Linux Shell脚本之自动修改IP
pda158
linuxcentosDebian脚本
作为一名
Linux SA,日常运维中很多地方都会用到脚本,而服务器的ip一般采用静态ip或者MAC绑定,当然后者比较操作起来相对繁琐,而前者我们可以设置主机名、ip信息、网关等配置。修改成特定的主机名在维护和管理方面也比较方便。如下脚本用途为:修改ip和主机名等相关信息,可以根据实际需求修改,举一反三!
#!/bin/sh
#auto Change ip netmask ga
- 开发环境搭建
独浮云
eclipsejdktomcat
最近在开发过程中,经常出现MyEclipse内存溢出等错误,需要重启的情况,好麻烦。对于一般的JAVA+TOMCAT项目开发,其实没有必要使用重量级的MyEclipse,使用eclipse就足够了。尤其是开发机器硬件配置一般的人。
&n
- 操作日期和时间的工具类
vipbooks
工具类
大家好啊,好久没有来这里发文章了,今天来逛逛,分享一篇刚写不久的操作日期和时间的工具类,希望对大家有所帮助。
/*
* @(#)DataFormatUtils.java 2010-10-10
*
* Copyright 2010 BianJing,All rights reserved.
*/
package test;
impor