计算机视觉----图像底层特征提取之边缘提取(一)
图像底层特征提取是计算机视觉的基本步骤
1:边缘和轮廓能反映图像内容;
2:如果能对边缘和关键点可靠提取的话,很多视觉问题就基本上得到了解决
边缘的定义
- “边缘是图像中亮度突然变化的区域。”
- “图像灰度构成的曲面上的陡峭区域。”
- “像素灰度存在阶跃变化或屋脊状变化的像素的集合。”
灰度图像中的边缘类型
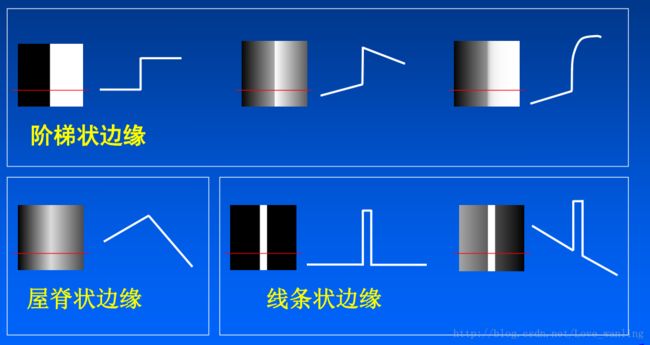
边缘的提取
灰度图象边缘提取,主要的思想:
- 抑制噪声(低通滤波、平滑、去噪、模糊)
- 边缘特征增强(高通滤波、锐化)
- 边缘定位
图像微分算子
图像微分算子分为一阶微分算子和二阶微分算子。一阶微分算子最大值的,二阶微分算子过零点都是对应边缘。
考虑下面的图像:

它的数据表示如下:

对f(x)求导,得到一阶微分图像:
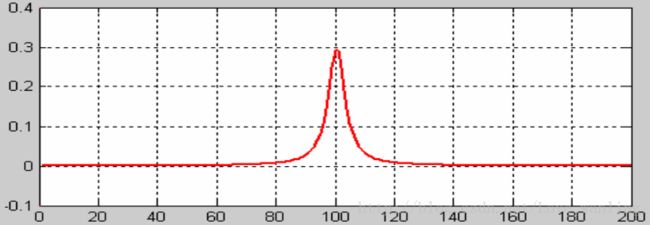
一阶微分在100处取得最大值,即此处的变化最大,为边缘。接下来我们看看二阶导数情况:
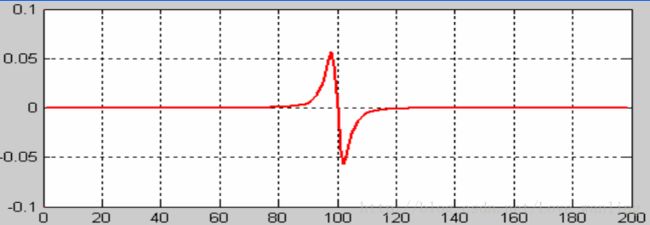
可以看出,二阶导数的过零点也是边界。但是要注意,过零点两侧要有符号变换,因为常数函数也是二阶导数为0。
在数字图像上计算梯度
根据导数的定义一阶导数可以写成:
f′(x)=dfdx=limΔx→0f(x+Δx)−f(x−Δx)2Δx
对于离散的数字信号,可以使用差分法近似:
f′(x)≈f(x+1)−f(x−1)2
相当于下面的卷积运算:


噪声影响
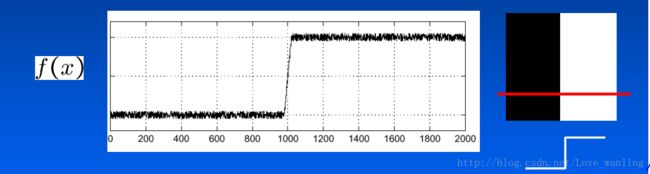
上图左侧是一维图像的表示,看似边界明显,但是由于有噪声的存在,是的求导之后的结果没有办法进行进一步操作,一阶导数图像如下:
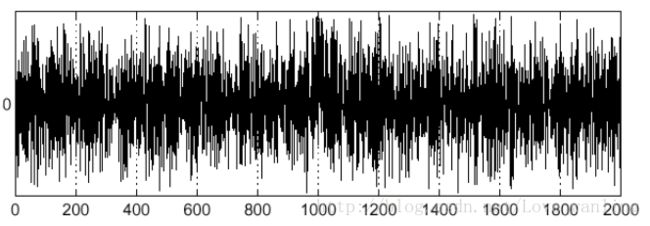
一团乱麻,根本没法找最大值,跟别说二阶导数求零点了。所以要去噪。我们用卷积来滤波。

这样最大值是不是就一目了然了(~ ̄▽ ̄)~。 另外卷积有性质,卷积的导数等于导数再卷积,所以可以简化成:
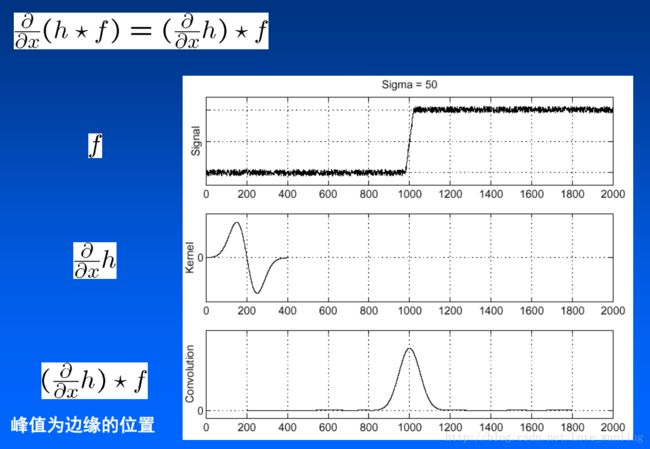
怎么样,是不是amazing。
图像梯度算子的近似
Prewitt算子

Prewitt算子近似一阶微分 将一列(行),变成了三列(行),达到平滑噪声的目的。
Sobel算子
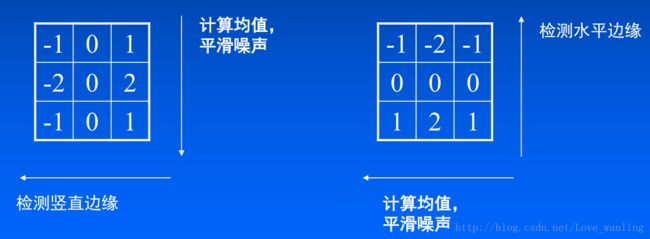
近似一阶微分 去噪 + 增强边缘,给四邻域更大的权重
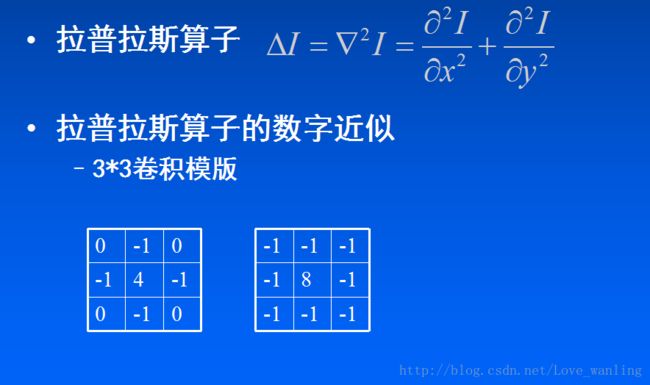
Laplace算子
这是一个二阶微分算子。我们先来看一下二阶微分在图像中怎么计算。
首先从二阶微分的定义入手:
f′′(x)=limx→0f′(x+Δx)−f′(x)Δx=limx→0f(x+Δx)−f(x)Δx−f(x)−f(x−Δx)ΔxΔx=limx→0f(x+Δx)−2f(x)+f(x−Δx)(Δx)2
在离散的图像中,则可以写成:
f′′(x)=f(x+1)−2f(x)+f(x−1)
所以一维的Laplaces算子为

二维形式推导如下:

所以
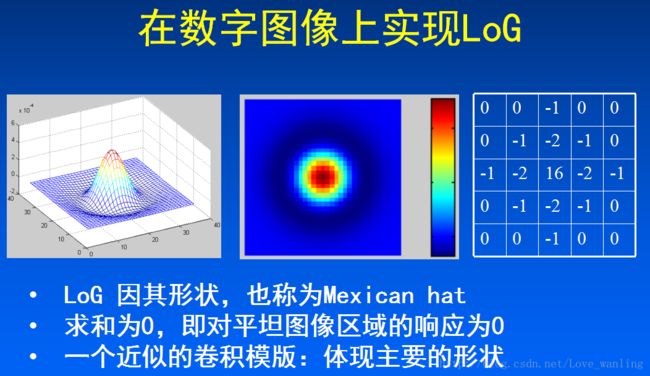
Laplacian of Gaussian
同样我们可以先进行高斯平滑,去除噪声,二阶导数到噪声太敏感了。

1. 中国科学院自动化研究所 董秋雷 课件
2. http://www.cnblogs.com/pegasus/archive/2011/05/20/2051780.html