图论基础算法——最短路之Dijstra算法
1.单源最短路:
介绍Dijstra算法之前先介绍单源最短路的概念吧!

而Dijstra算法常常用于解决单源最短路问题。
2.Dijstra算法简介:
a.Dijstra算法能够解决的问题:
常常用于计算一个顶点到其他所有顶点的最短路径。Dijstra算法的主要特点是以起点为中心,逐层向外扩展(这一点类似于bfs,但是不同的是,bfs每次扩展一个层(即扩展当前点能到达的点),但是Dijstra每次只会扩张一个点),每次都会取一个最近点继续扩展,直到取完所有的点为止。
注意:Dijstra算法要求图中不能出现负边权。(证明下面会给出)
b.Dijstra算法流程

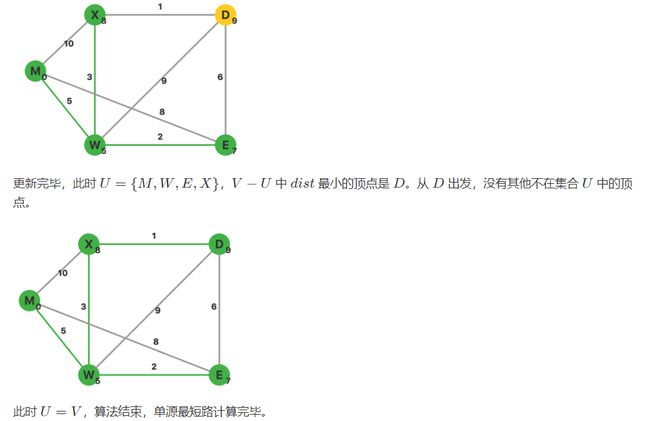
c.Dijstra算法演示:


3.时间复杂度为O(n^2)代码(n为顶点数)
这里使用链表形式的邻接表存储图,效率过高,可以学习一下
#include 4.证明负边权导致Dijkstra算法不成立:
首先我们看上图,然后用上面说的算法流程来计算最短路
S代表源点
首先我们更新S能到达的点的最短路比如S能到达A和B那么S到A的最短路就是7,S
到B的最短路就是5,发现当前B点的路径最短,我们就遍历B能到达的点C更新C的最短路5 + 1 = 6发现6比S->A的最短路径7,然后遍历C访问到的点A,发现最短路径为6 + (-6) = 0,即更新S -> A的最短路,显然S -> A不可能最短路为0,则算法无法成立。
5.使用堆优化Dijkstra算法:
const int MAX_N = 10000;
const int MAX_M = 100000;
const int inf = 0x3f3f3f3f;
struct edge {
int v, w, next;
} e[MAX_M];
int p[MAX_N], eid, n;
void mapinit() {
memset(p, -1, sizeof(p));
eid = 0;
}
void insert(int u, int v, int w) { // 插入带权有向边
e[eid].v = v;
e[eid].w = w;
e[eid].next = p[u];
p[u] = eid++;
}
void insert2(int u, int v, int w) { // 插入带权双向边
insert(u, v, w);
insert(v, u, w);
}
typedef pair<int, int> PII;
set<PII, less<PII> > min_heap;
int dist[MAX_N]; // 存储单源最短路的结果
bool vst[MAX_N]; // 标记每个顶点是否在集合 U 中
bool dijkstra(int s) {
// 初始化 dist、小根堆和集合 U
memset(vst, 0, sizeof(vst));
memset(dist, 0x3f, sizeof(dist));
min_heap.insert(make_pair(0, s));
dist[s] = 0;
for (int i = 0; i < n; ++i) {
if (min_heap.size() == 0) { // 如果小根堆中没有可用顶点,说明有顶点无法从源点到达,算法结束
return false;
}
// 获取堆顶元素,并将堆顶元素从堆中删除
set<PII, less<PII> >::iterator iter = min_heap.begin();
int v = iter->second;
min_heap.erase(*iter);
vst[v] = true;
// 进行和普通 dijkstra 算法类似的松弛操作
for (int j = p[v]; j != -1; j = e[j].next) {
int x = e[j].v;
if (!vst[x] && dist[v] + e[j].w < dist[x]) {
// 先将对应的 pair 从堆中删除,再将更新后的 pair 插入堆
min_heap.erase(make_pair(dist[x], x));
dist[x] = dist[v] + e[j].w;
min_heap.insert(make_pair(dist[x], x));
}
}
}
return true; // 存储单源最短路的结果
}
欢迎关注:ly’s Blog