ROC-RK3308-CC开发实例总结——HZ711 压力传感器的使用方法
最近调试了型号为hz711的一款压力传感器,调试过程并不算十分艰难,但也需注意此传感器的数据传输方式和获取质量的技巧。
1、查看传感器的相关资料。
查看传感器的硬件连接图:

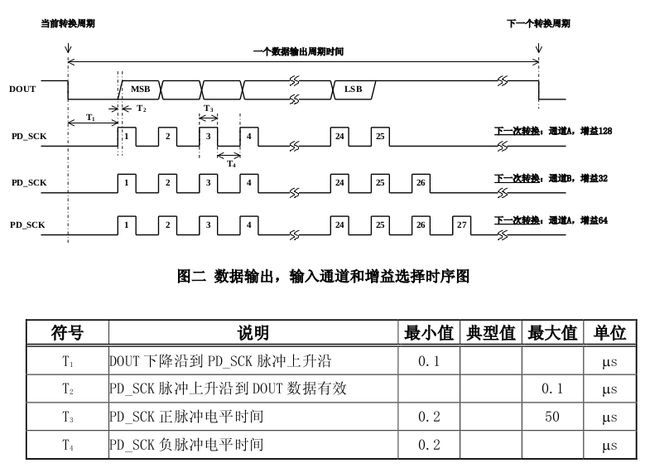
由此可知SCK与DOUT连接两个gpio口作为数据传输。再看时序图:
2、对传感器工作模式已经了解之后,开始编写驱动程序!首先在DTS中添加节点。文件路径:/kernel/arch/arm64/boot/dts/rockchip/rk3308-firefly.dtsi。在此用的是 gpio1 A0 和 gpio1 A1 。
hz711_test{
compatible = "hz711";
sck-gpio = <&gpio1 RK_PA1 GPIO_ACTIVE_LOW>;
dt-gpio = <&gpio1 RK_PA0 GPIO_ACTIVE_LOW>;
flag-gpio = <&gpio1 RK_PA2 IRQ_TYPE_LEVEL_HIGH>;
status = "okay";
};3、添加节点后,便在/kernel/driver/ 下创建了名为:hz711 的目录。并在目录中创建 c文件、Kconfig、Makefile ,把目录加入到 /drive 下的Kconfig与Makefile中。并完成 /hz711 下的 Kconfig、Makefile文件的编写。在此不再赘述框架搭建,进入驱动中probe的编写:
static int hz711_probe(struct platform_device *pdev)
{
enum of_gpio_flags dt_flag;
enum of_gpio_flags sck_flag;
hz711 = kmalloc(sizeof(struct HZ711), GFP_KERNEL); //申请内存空间
if(!hz711)
{
printk("hz711 kmalloc memory err!!!\n");
return -ENODEV;
}
hz711->sck_gpio = of_get_named_gpio_flags(pdev->dev.of_node, "sck-gpio", 0, &sck_flag); //获取sck-gpio的信息
if(!gpio_is_valid(hz711->sck_gpio)) //判断对应gpio口是否合法
{
printk("sck-gpio is invalid!\n");
return -ENODEV;
}
gpio_direction_output(hz711->sck_gpio, 0); //设置为输出模式
hz711->dt_gpio = of_get_named_gpio_flags(pdev->dev.of_node, "dt-gpio", 0, &dt_flag); // 获取dt-gpio的信息
if(!gpio_is_valid(hz711->dt_gpio)) //判断对应gpio口是否合法
{
printk("dt-gpio is invalid!\n");
return -ENODEV;
}
gpio_direction_input(hz711->dt_gpio); //设置为输入模式
if(gpio_request(hz711->sck_gpio, "sck-gpio")) //申请占用对应的gpio口
{
printk("request sck-gpio faild!!!\n");
gpio_free(hz711->sck_gpio);
return -1;
}
if(gpio_request(hz711->dt_gpio, "dt-gpio")) //申请占用对应的gpio口
{
printk("request dt-gpio faild!!!\n");
gpio_free(hz711->dt_gpio);
return -1;
}
first_weight = (long)HZ711_Read(); //获取初始质量
return 0;
}为了获取质量,编写一个函数接口方便调用。下面进行Get_Weight()函数的编写:
int Get_Weight(void)
{
int Weight;
Weight = (long)HZ711_Read(); //获取质量
Weight = (long)(Weight - first_weight); //减去初始质量,获得净重
if(Weight < 0)
Weight = (- Weight);
Weight = (int)(Weight / Gapvalue); //除以质量系数(430),得到所需数据
return Weight;
}
在此,需要注意:一定要先获取初始质量,再用二次测量质量减去初始质量,得到净重!!再看看HZ711_Read()函数的编写:
long HZ711_Read(void)
{
long count = 0;
int i;
mdelay(10); //让传感器准备就绪
gpio_set_value(hz711->sck_gpio, 0);
while(gpio_get_value(hz711->dt_gpio)); //等待DT口为低电平(开始读取数据)
for(i=0; i<24; i++)
{
gpio_set_value(hz711->sck_gpio, 1);
if(i != 0)
count = count<<1; //高位先出,在此使用位操作
udelay(25);
gpio_set_value(hz711->sck_gpio, 0);
if(gpio_get_value(hz711->dt_gpio))
count++; //读取保存数据,0 1操作
udelay(25);
}
gpio_set_value(hz711->sck_gpio, 1);
count=count^0x800000; //第25个脉冲下降沿来时,转换数据
udelay(25);
gpio_set_value(hz711->sck_gpio, 0);
return count;
}
在此,编写代码时可参照时序图加以理解,对照时序图进行IO操作即可得到数据。
4、得到数据后,需将数据传输到应用层,在此定义一个设备节点以方便上层打开查看,具体如下:
ssize_t hz711_read(struct file *filp, char __user *buf, size_t size, loff_t *f_pos)
{
int ret;
char Weight_buf[20] = {0};
Weight = Get_Weight(); //调用接口,获取质量
if(Weight >= 5000) //超重提示并返回!
{
ret = copy_to_user(buf, "Overweight!(5000g)", sizeof("Overweight!(5000g)")); //发送信息到设备节点
return ret;
}
sprintf(Weight_buf, "%d", Weight); //将整型数据转换成字符串类型
ret = copy_to_user(buf, Weight_buf, 10); //发送信息到设备节点
return ret;
}
static struct file_operations hz711_fops = {
.owner = THIS_MODULE,
.open = hz711_open,
.release = hz711_release,
.read = hz711_read,
};
static struct miscdevice hz711_miscdev = {
.minor = MISC_DYNAMIC_MINOR,
.name = "HZ711", //设备节点的名称
.fops = &hz711_fops, //设备节点的信息内容
};5、到此,内核的驱动程序已经编写完成,具体细节可下载附件中的源代码查看。是时候测试所写程序的效果了,在此编写了一个简单的应用层测试程序:
int main (int argc, char argv[])
{
char buff[10] = {0};
int fd, ret;
fd = open("/dev/HZ711", O_RDONLY);
if(fd < 0)
{
printf("open /dev/HZ711 faild!!\n");
return -1;
}
ret = read(fd, buff, 10);
if(ret < 0)
{
printf("read fd faild!!\n");
return -1;
}
printf("the weight is %s g\n", buff);
close(fd);
return 0;
}在此,先前所写的设备节点是在:/dev目录下。打开设备进行read(),即可拿到copy_to_user()的信息数据。
6、把写好的内核驱动程序及测试程序编译、烧录入板子。一切工作都已经准备就绪,现在就可开始运行程序查看效果啦!!
进入Firefly开发者社区可下载源码及资料
———————————————
更多信息请关注Firefly公众微信号fireflytee:

———————————————
Firefly官网:http://www.t-firefly.com
Firefly开源社区:http://developer.t-firefly.com