基于AT89C51单片机的超声波传感器测距【程序详细代码及注释】
基于AT89C51单片机的超声波HC-SR04测距 LCD1604显示
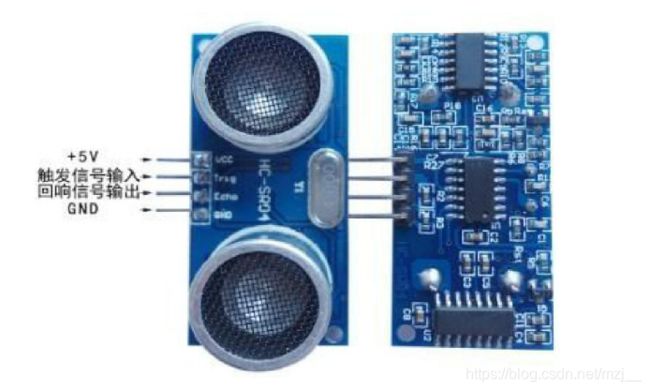
硬件介绍
引脚四个,分别为VCC、TRIG、ECHO、GND
VCC 供 5V 电源, GND 为地线
TRIG 触发控制信号输入
ECHO 回响信号输出等 四个接口端
超声波时序图
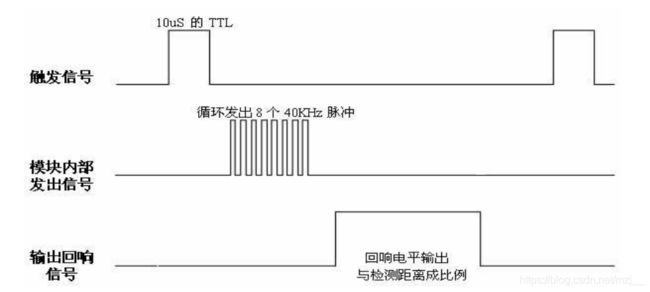
以上时序图表明你只需要提供一个 10uS 以上脉冲触发信号,该模块内部将 发出 8 个 40kHz 周期电平并检测回波。一旦检测到有回波信号则输出回响信号。 回响信号的脉冲宽度与所测的距离成正比。由此通过发射信号到收到的回 响信号时间间隔可以计算得到距离。
公式:uS/58=厘米或者 uS/148=英寸; 或是:距离= 高电平时间*声速(340M/S)/2;建议测量周期为 60ms 以上, 以防止发射信号对 回响信号的影响。
注:
1、此模块不宜带电连接,若要带电连接,则先让模块的 GND 端先连接,否则 会影响模块的正常工作。
2、测距时,被测物体的面积不少于 0.5 平方米且平面尽量要求平整,否则影响 测量的结果
程序代码
/******************************************************************************/
/* 主控芯片 : STC89C52 */
/* 文件名称 : UltraSonic */
/* 文件功能 : 超声波模块操作 */
/* 注 :需要用杜邦线把超声波模块的
VCC----VCC TRIG---P1.6 ECHO---P1.7 GND----GND 相连 */
/******************************************************************************/
/**********************************包含头文件**********************************/
#include 1602.h代码
/******************************************************************************/
/* 项目名称 : 超声波测距 */
/* 主控芯片 : STC89C52 */
/* 文件名称 : 1602 */
/* 文件功能 : 1602液晶操作 */
/******************************************************************************/
/************************************宏定义************************************/
#define uchar unsigned char
#define uint unsigned int
/************************************位定义************************************/
sbit dula = P2^6;
sbit wela = P2^7;
sbit rs = P3^5;
sbit lcden = P3^4;
/******************************************************************************/
/* 函数名称 : delay */
/* 函数描述 : 延时函数 */
/******************************************************************************/
void delay(uint x)
{
uint a,b;
for(a = x;a > 0;a--)
{
for(b = 10;b > 0;b--)
{
;
}
}
}
/******************************************************************************/
/* 函数名称 : write_com */
/* 函数描述 : 1602写命令函数 */
/* 输入参数 : com */
/* 参数描述 : 控制命令 */
/* 返回值 : 无 */
/******************************************************************************/
void write_com(uchar com)
{
P0 = com;
rs = 0;
lcden = 0;
delay(10);
lcden = 1;
delay(10);
lcden = 0;
}
/******************************************************************************/
/* 函数名称 : write_date */
/* 函数描述 : 1602写数据函数 */
/* 输入参数 : date */
/* 参数描述 : 要写入的数据 */
/* 返回值 : 无 */
/******************************************************************************/
void write_date(uchar date)
{
P0 = date;
rs = 1;
lcden = 0;
delay(10);
lcden = 1;
delay(10);
lcden = 0;
}
/******************************************************************************/
/* 函数名称 : initLCD */
/* 函数描述 : 1602初始化函数 */
/******************************************************************************/
void initLCD(void)
{
dula = 0;
wela = 0;
write_com(0x38);
delay(20);
write_com(0x0f);
delay(20);
write_com(0x06);
delay(20);
write_com(0x01);
delay(20);
}
/****************************/