系统:Linux( Ubuntu 11.04 )
ARM板:FL2440开发板
USB转串口线:PL2303
### 大纲
1.串口驱动
2.minicom配置
3.交叉编译环境搭建
------------------------------------------------------
1.串口驱动
考虑linux内核配有串口驱动,这里忽略。
使用命令
dmesg|tail
查看设备使用情况,如下:

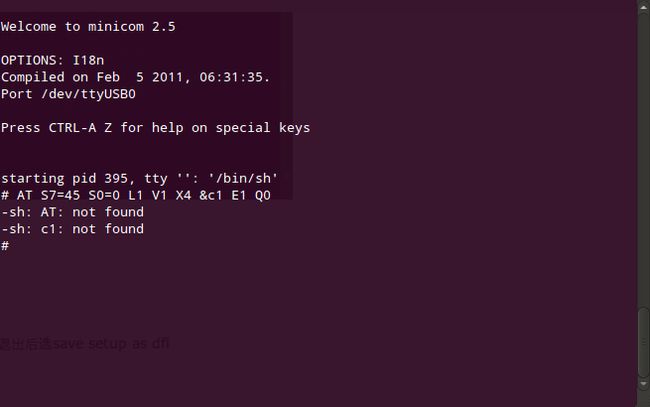
2.minicom配置
注意使用的是ttyUSB0,而非minicom默认的tty8
所以使用命令更改
sudo minicom -s
选择serial port setup,更改tty8为ttyUSB0即可。回车退出后选save setup as dfl
选exit后,我这里出现
3.交叉编译环境的搭建
选择手头上的cross-3.4.1.tar.bz2,虽然现在版本要新多了。。。。
使用解压命令
tar -jxvf cross-3.4.1.tar.bz2
将解压出来的3.4.1文件复制到/usr/local/arm中
再添加路径,比如说在/etc/bash.bashrc尾部增加一行:
export PATH=/usr/local/arm/3.4.1/bin:$PATH
重启终端后可以看到arm-linux-gcc命令可以自动补全了
-----------------------------------------------------------------------------------------------
今晚就到这里了
同步更新:
http://hi.baidu.com/thunderlove/home
http://www.cnblogs.com/shawnwho
http://huxyz.blogspot.com