大地测量
1. *大地测量的任务:建立与维持大地基准,高程基准,深度基准,重力基准;确定与精化似大地水准面和地球重力场模型
(4个基准,2个模型)
类似:大地测量系统包括:坐标系统,高程系统,深度系统,重力参考系统。
2. 高程基准:我国现采用1985青岛水准原点72.2604m。
3. *高程系统:我国现采用正常高系统,也就是地面点沿正常重力线到似大地水准面的距离。
4. 高程框架:是高程系统的实现。以青岛水准原点为起算基准,以正常高系统为水准高差传递方式。
5. 重力测量:测定某一点的重力加速度。
6. 重力基准:国家重力基准是2000国家重力基本网,由FG5绝对重力仪测量。
7. 常用的时间系统:世界时UT,原子时AT,力学时DT,世界协调时UTC,GPS时GPST。(5种)
8. 地心坐标系,原点在地球质心。高斯直角坐标使用横切椭圆柱投影,中央子午线投影处直线长度不变,非中央子午线处直线越离变形越长。
9. 水平角观测方法:方向观测法(三四等三角观测),分组方向观测法(观测方向多于6个),全组合测角法(一二等三角观测)。
10. 影响三角高程测量的因素:垂直角观测精度、测距精度、仪器高、砧标高量取高(目标高),垂直大气折光系数k。(多选题)(5种)
11. 大气垂直折光减弱措施:有利的观测时间、对向观测、提高观测视线高度、短边传算(多选题)(4种)
12. 一二等导线测量,距离测量要求:
*每边观测总测回数:16
最少观测时段:往返测或2个不同时间段测
每时间段观测的最多测回数:10(不能观测太多?按照总16测回,每时段8测回合适?)
*同时间段经气象改正后的测回互差限值/mm:20mm
一测回的读数次数:4
*一测回的读数互差限值/mm:20mm (提示:互差总是20mm)
不同时段经气象和归心修正后的测回互差限值/mm:5+3S(S为KM)(3、4次、5、10测回、16测回、20mm)
13. 在导线交叉点上,应观测的方向数多于2个时,一二等采用全组合测角法,三四等导线采用方向观测法。(提示:一二等总是全组合测角法,三四等总是方向观测法)
GNSS
全球导航卫星系统连续运行基准网站(全球卫星导航系统)
GNSS组成:连续运行基准站、数据中心、通信网络。(多选题)
GNSS连续运行基准站组成:GNSS设备、气象设备、电源设备、通信设备、计算机设备、防雷设备;观测墩、观测室、工作室。
(注意,不包含卫星)
数据中心:计算机,网络设备,软件系统和机房;
GNSS基准站建设要求:(案例考题)
*一. 远离产生多路径效应的地物(高大建筑、树木)大于200m
*二. 应有10°(不是15°)以上地平高度角的卫星通视条件。(综合考点,选择题)
三. 远离无线电、高压线等电磁干扰区大于200m(总是大于200m)
四. 避开采矿区,铁路,公路等容易产生震动的地方
*五. 顾及未来规划和建设,选择环境变化小的区域
六. 应进行24小时以上的实地测试,对于国家基准站和区域基准站,数据可用率应大于85%(应该是除去周跳部分),多路径效应小于0.5m
GNSS基准站地质环境应该保障:(除了对数据质量之外的要求)
一. 便于接入公共或专用通信网络
二. 具有稳定、安全可靠的电源
*三. 交通便利,便于人员来往和车辆运输
四. 具有良好的土建施工条件
五. 具有建设用地及基本基础设施保障
六. 具有良好的安全保障环境,便于人员维护和站点的长期保存
(有网,有电,有交通,环境稳定安全)
基准站维护要求
一. 保障每天24小时连续运行,必要时安装报警系统
二. 定期检测,必要时更新设备
*三. 定期和国际GNSS服务(IGS)站进行联测解算,维持坐标框架更新
*四. 根据需要对埋设的水准标志按照《国家水准联测纲要》进行定期测定(可能是因为GPS测量高程不够准)
*五. 根据需要对埋设的重力标石与国家重力基本网进行定期联测 (国家重力基准是2000国家重力基本网,由FG5绝对重力仪测量)
(坐标,水准,重力,与大地测量的任务对应)
GNSS网点选址与埋石(关注)
基本原则
1. B级点必须在一等水准路线结点或一等与二等水准路线结点处;建在基岩,如果3km范围内都没,可在土层
2. C级点,如果作为水准路线结点,需要建在基岩;如没有基岩,或不利于后续水准测量,可选择在土层
3. 点位分布均匀
(提示:水准结点、基岩处)
选点要求
1. 人员要熟悉GPS,水准测量的测绘工程师和地质师组成(因为原则要顾及水准测量和找基岩)
2. 实地勘察
3. 应选择在稳定的基岩、岩石、土层、建筑物顶部,能长期保存
4. 大于200m(和GNSS基准站建设要求差不多)
5. 避开多路径效应,保证点位高度角15°以上无遮挡(这样才能保证GNSS基准站建设要求中,10°以上地平高度角的卫星通视条件),困难地区大于15°的遮挡物,在水平投影范围总和不应超过30°。50m以内的各种反射体应标准在环视图上
6. 选点时必须绘制水准联测示意图
标石

接收机的技术指标包括:
一. 具有同时跟踪不少于24个全球导航定位卫星的能力(联想起基准站建设要求24小时试测)
二. 具有1HZ(注意是HZ,1s采集一次载波,不是MHZ)采样数据的能力
三. 观测数据至少包括:双频测距码、双频载波相位值、卫星广播星历(3种 双频+星历)
四. 能在-30°C到+55°C、湿度95%环境下工作
五. 具备外接频标输入口,可配5MHZ或10MHZ(注意是MHZ,不是HZ)的外接频标
六. 外接自动气象设备并存储数据(注意到GNSS基准站的组成)
(提示:卫星个数,采集频率,双频+星历,工作环境,接入输出等要求)
天线的技术指标:
一. 相位中心稳定性优于3mm
二. 具备抗多路径效应的扼流圈或抑制板 (也是GNSS建站要求之一)
三. 具有抗电磁干扰能力(也是GNSS建站要求之一)
四. 有定向指北标志
五. 能在-40°C到+65°C(比接收机还要恶劣的环境)下工作
六. 气候条件差的地方配置防护罩
气象设备
(注意上面提及接收机要可以接入气象设备)
一. 可连续测定气压、温度、湿度
二. 气压精度±0.1hPa,温度精度±0.5°C,湿度精度±1%(提示:接收机需要能在95%湿度工作)
三. 可设置采样间隔
四. 具备通信接口,可随时数据传输
GNSS控制网等级(关注)
*GNSS系统包括:全球定位系统GPS,格洛纳斯导航定位系统GLONASS,伽利略卫星导航系统Galileo,北斗卫星导航定位系统Beidou
按测量精度分为ABCDE五级:
A级. 用于建立国家一等大地控制网,进行全球性的地球动力学研究、地壳形变测量和卫星精密定轨
B级. 用于建立国家二等大地控制网,建立地方或城市坐标基准框架,进行区域的地球动力学研究、地壳形变测量和各种精密的工程测量
C级. 用于建立国家三等大地控制网,以及区域、城市、工程测量的基本控制网
D级. 用于建立国家四级大地控制网
E级. 用于测图、施工(没有第五级的控制网了)
(只有AB两级是研究地球的)
(下图掌握)尤其A级
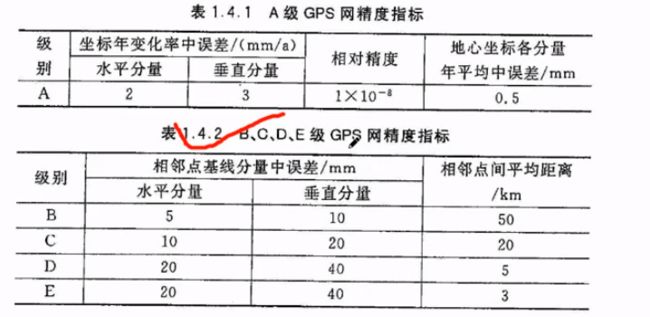
等级越高,两点间距要求越高,中误差要求越细,BCDE水平分量是垂直分量的一半
GPS外业作业要求(2011考点)
*1. 假设天线时要求严格整平,对中,天线定向应该指向磁北,定向误差不得大于5°
2. 认真检查仪器,天线,电源后才可以开机
*3. 开机后应该输入测站编号,天线高
*4. 每时段前后应该测量天线高,读数精确至1mm
5. 观察手簿必需现场填写,不能事后涂改编造
6. 定期检查接收机各种信息
7. 认真操作仪器,严防碰动
*8. 雨季防雷
GNSS测量数据处理包括:外业数据质量检核、GPS网基线处理及数据质量检查、GPS网瓶平差
GNSS外业数据质量检查:
1. 观测卫星总数 (提示:接收机技术要求是,同时跟踪卫星个数不低于24个)
2. 数据可利用率(大于80%,比GNSS基准站建设要求的85%要低)
3. L1、L2多路径效应影响MP1、MP2应小于0.5m (和GNSS基准站建设要求一样) 多路径效应都要小于0.5m
4. GNSS接收机钟的日频稳定性不低于10-8(和A级网相对精度同一个数字)
GNSS外业数据质量处理(2011年案列题)
(外业数据质量处理,包含:数据剔除率、复测基线长度差、同步观测闭合环、独立环闭合差及附合路线坐标闭合差)
1. 数据剔除率,同一时段内观测值的数据剔除率,不应该超过10%。(提示:数据质量检查时,数据可利用率大于80%)
2. 复测基线长度差,CD级网基线处理和B级网外业预处理后,任意两个重复观测基线长度之差ds应满-足:ds 小于 2倍根号2
![]()
(2011年案例题)
3. 同步观测闭合环,对三边同步观测闭合差值进行检验,闭合差应 wx 、 wy 、 wz 小于根号3 除以 5,再乘以规定级别的基线中误差σ

4. 独立环闭合差及附合路线坐标闭合差,CD级网基线处理和B级网外业预处的结果,其独立环闭合差应该满足 wx 、wy、wz小于3乘以根号n,再乘以基线中误差σ
![]()
n为闭合环边数,中误差σ为基线测量中误差![]()
GPS网平差
(GPS网平差的主要步骤,包含:基线向量提取、三维无约束平差、约束平差和联合平差、质量分析与控制)
1. 基线向量提取,提取原则:
一. 必须选取相对独立的基线
二. 所选取的基线应构成闭合的几何图形
三. 选取质量好的基线向量
四. 选取能构成边数较少的异步环的基线向量
五. 选取边长较短的基线向量
(提示:独立,闭合,环边数少,短)
2. 三维无约束平差,主要目的:(要掌握)
一. 根据无约束平差的结果,判别所在构成的GPS网中是否有粗差基线
二. 调整各极限向量观测值的权,使得它们相互匹配
(提示:检查粗差、调整权)
3. 约束平差和联合平差
一. 指定进行平差的基准和坐标基准
二. 指定起算数据
三. 检验约束条件的质量
四. 进行平差解算
4. 质量分析与控制的指标
一. 基线向量改正数
二. 相邻点的中误差和相对中误差
(基线改正数和点位相对中误差)
高程控制网
水准网的布设原则:采用正常高,由一、二、三、四等,从高级到低级、从整体到局部、逐级控制和加密。
一等水准网的布设原则:延地质稳定,路面平缓的交通路线布设,形成闭合环,构成网状。
一等水准网的周长:东部小于1600km,西部小于2000km 。(1600,2000)
二等水准网的布设原则:沿省、县级公路布设。
二级水准网的周长:平原和丘陵地区不大于750km。(750)
(一二等关键词:交通线路、公路,水准网周长)
三、四等水准网,在一、二等水准网的基础上加密。根据需要和高等水准网形成符合,闭合环。
(提示:无论是卫星基线,水准路线,导线,都要求构成闭合环)
单独的三等符合路线:长度不超过150km,环周长不超过200km,结点间的距离不超过70km。(150,200,70)
单独的四等符合路线:长度不超过80km,环周长不超过100km,结点间的距离不超过30km。(80,100,30)

(提示:水准网的偶然中误差,是全中误差的一半,从一到四级,偶然中误差从0.45,1,3,5,全长中误差:1,2,6,10)
(重点关注一等和三等每千米水准测量偶然中误差)
一二等水准测量的程序和步骤按照:GB/T 12879-2006《国家一二等水准测量规范》
三四等水准测量的程序和步骤按照:GB/T 12898-2009《国家三四等水准测量规范》
水准测量的基本要求:
*一. 观测前30分钟,应将一起处于露天阴影下,使得一起与外界气温一致;设站时遮挡阳光;使用数字水准仪时,预热次数不少于20次单次测量
二. 严格整平,对气泡式水准仪,要随气温随时调整
*三. 三脚架应有两脚与水准路线方向平行
*四. 前后视,测站三个位置尽量接近直线
*五. 每测段的往返测,其测站数均为偶数
六. 选择长度稳定,分划误差较小的水准尺
七. 避免望远镜对准太阳,视线被遮挡不超过标尺在望远镜中截长的20%
水准测量的误差来源:
*一. 仪器误差:视准轴和水准轴不平行的误差、水准尺每米真长误差、两根水准尺零点误差(3种)
*二. 外界因数:气温变化对i角影响、大气折光、仪器脚架、尺台升降(4种)
三. 观测误差:整平、照准、读数误差。数字水准仪的调焦误差(4种)
水准测量的外业计算:
一、二等水准测量外业高差和概略高程表编算时,高差应该加入:水准尺长度改正、水准尺温度改正、正常高水准面不平行改正、重力异常改正、固体潮汐改正、环闭合差改正。(6种)
三、四等水准测量外业高差和概略高程表编算时,高差应该加入:水准尺长度改正、正常高水准面不平行改正、环闭合差改正。(3种)
国家重力控制网分为三级:国家重力基本网、国家一级重力网、国家二级重力点。此外还有:国家级重力仪标定基线。(3+1种)
(国家基本重力网,由FG5绝对重力仪测定)
加密重力测量设计原则:以测区已有重力控制点为起算,按符合或闭合路线进行加密重力测线设计。其中,加密重力测量符合或闭合时间一般不超过60小时。
(提示:重力测量时间是有60小时限制的)
重力测量(单选题):重力测量是测定重力加速度。
绝对重力测量:利用绝对重力仪测定地面点的绝对重力加速度的重力值
相对重力测量:利用摆仪或相对重力仪测定两点间的重力加速度的差值
一等重力联测
联测路线:应组成闭合或附合在两基本点之间,其测段数不超过5段(2013年考点);
联测观测方法:对称观测法,即A、B、C、C、B、A、,仪器停放超过2小时,重测,消除静态零漂
闭合时间限制:24小时内,特殊情况不超过48小时
精度要求:中午差优于25乘以10负2次方,单位:m除以秒的平方
(提示:重力测量对测段数,测点数有限制;对测量时间有限制)
二等重力联测
联测路线:闭合或附合路线中的二等重力点不超过4个,支路线中允许支测2个
联测观测方法:三程循环法A、B、A、B、A、B
闭合时间限制:36小时内,特殊情况不超过48小时
精度要求:中午差优于250乘以10负2次方,单位:m除以秒的平方,是一等的10倍
(提示:二等重力联测重力点不超过4个,换算成测段,也就是4段,比一级少一段)
重要提示:各类重力点必须测定坐标和高程,重力点的平面坐标,高程中误差不超过1米
(提示:对重力点的坐标误差要求,远远低于GPS和控制点的要求,只有1m)
似大地水准面精细化(重点中的重点)
1. 大地水准面:一个静止的平均海水面重合并延申到大陆内部的包围整个地球的封闭的重力位水准面。大地水准面也称为重力等位面。 是几何和物理面。
(提示:大地水准面其实就是平均海水面)
2. 正高:地面一点沿该点的重力线到大地水准面的距离。
(注意:正高和大地水准面匹配)
3. 似大地水准面:从地面一点,沿正常重力线按照正高的相反方向,量取至正高所得的端点所构成的曲面。
(提示:大地水准面包裹似大地水准面,似大地水准面和大地水准面相似)
4. 正常高:从地面一点,沿正常重力线到似大地水准面的距离。我国所使用的法定高程系统,就是正常高系统。
(注意:正常高和似大地水准面匹配,我国使用的就是1985青岛72.2604米为水准原点)
5. 大地高:从地面点延法线到所采用的参考椭球面的距离(GPS使用参考椭球面和大地高,注意是延法线,不是正常重力线)
(提示:参考椭球,其体积是最小的,被似大地水准面包裹)
6. 大地水准面差距N:参考椭球面和大地水准面之间的差距
7. 高程异常:地球(参考)椭球面和似大地水准面的垂直距离(法线)(注意不是正常重力线)
(提示:可见大地水准面和似大地水准面,不关注比较关系。)
8. 大地高 = 正高 + 大地水准面差距 = 正常高 + 高程异常
(提示:两个重要的高差,都是与参考椭球面比较)
大地水准面精细化:就是精细化大地水准面差距
似大地水准面精细化:就是精细化高程异常(提示,由于我国使用正常高,所以关注高程异常。这也是大地测量的目的之一)
似大地水准面精细化方法:几何法(天文水准,卫星测高,GPS水准)、重力法、几何与重力联合法(3种)
似大地水准面计算流程
似大地水准面精细化主要综合利用:重力资料、地形资料、重力场模型、GPS水准成果 (4种)
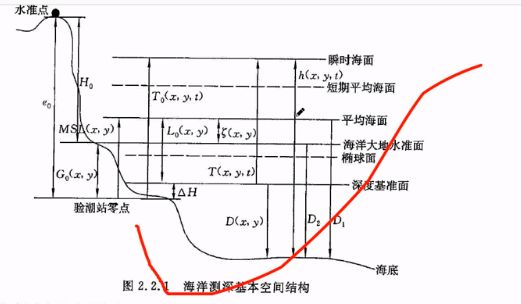
海洋测绘
海洋测绘包括:海洋及其临陆地和江河湖泊进行测量和调查,制作海图和编制导航资料
海洋测绘的特点:测量工作的实时性、海底地貌的不可视性、测量基准的变化性、测量内容的综合性(海洋及其临近陆地,所以有综合性)
海洋测绘的任务:获取大气(例如:温度,风雨,云雾),水文(例如:水温,盐度,密度,化学成分,潮汐等和水有关),海底地形,地貌,地质,重力,磁力等,并绘制专用图件
(提示:水文观测,和水有关的各种属性,外加潮汐,潮流,波浪,声速)
(提示:海洋测绘比普通的大地测量,突出的是水文测量)
海洋测绘的分类:海洋大地测量、海洋重力测量、海洋磁力测量、海洋跃层测量、海洋声速测量、海道测量、海底地形测量、海图制图、海洋工程测量(8种)
(提示:任务都是获取原始的数据,而分类则是对各种原始数据的利用进行分门别类)
海道测量任务:进行水深测量和海岸地形测量,获取海底地貌、地质和航行障碍物
海道测量目的:为航海图提供数据,保证船舶航行安全
海道测量的基本内容:
一. 控制测量
二. 进行水位观测,确定平均海面、深度基准面、水深测量时的水位改正
三. 进行水深测量、助航标志的测量、航行障碍物的调查深探、水文和底质测定
四. 海岸地形测量
(关键词:控制测量,水位、水深、地形)
海洋测绘的基准:大地基准、高程基准、深度基准、重力基准(和大地测量的几个目的差不多)
坐标基准:2000国家大地坐标系(CGCS2000)
高程基准:1985国家高程基准(跟大地测量中,我国现使用的水准基准一样)
深度基准:我国采用理论最低潮面
深度基准面的起算高度:当地平均海面
海洋测绘的基础工作:定位、测深、验潮
*海洋定位的方法:天文定位、光学定位、无线电定位、卫星定位、水声定位(5种)
(提示:海洋高程控制测量的主要方法有:几何水准测量、测距高程导线测量、三角高程测量、GPS测量)
*海洋测深的方法:测深杆,测深锤、(杆锤)、回声探深仪、多波束探深系统、机载激光探深系统
验潮的方法:通过设置验潮站进行潮汐观测。
验潮站分为:长期、短期、临时、海上定点共4种。
沿岸验潮站:采用验潮仪、水尺,其观测误差小于2cm
海上定点验潮站:采用水位计、回声探测仪,水位计观测误差不大于5cm;回声探测仪站位水深低于50m,误差少于水深的1%
验潮的目的:1. 确定各验潮站的多年平均海面、深度基准面、各分潮的调和常数;2. 获得探深时的水位改正数
海图要素:数学要素、地理要素、辅助要素(3大类)
海图的数学要素:包括海图投影、与海图投影有关的坐标网、基准面、比例尺
海图的数学基础:坐标系,投影、比例尺
海图的坐标系:和海洋测绘的坐标系一样,使用国家2000坐标系;但是国际上使用的是WGS84坐标系
海图的投影:使用墨卡托投影(就是在球心,向外包裹圆柱投影),注意不是高斯投影;而大于1:20000的海图可采用高斯投影;绘图区60%以上的地区纬度高于75度时(例如北极圈的图),使用日晷投影(类似极坐标的投影)
地理要素:包括海域要素、陆地要素
辅助要素:包括图标、图例、图名、出版单位等
海图分类:按内容分为普通、专题、航海三大类;按存储形式分为纸质、电子
海图分幅的方式:自由分幅
海图分幅的基本原则:保持制图的相对完整、航线及航行要素的相对完整、减少图幅数量。(完整、完整、数量)
海洋测量的技术设计主要内容:(多选题)
1. 确定测量目的和测区范围
2. 划分图幅、确定测量比例尺
3. 确定测量技术、主要设备
4. 明确测量工作的技术保证措施
5. 编写技术设计书和绘制有关附图
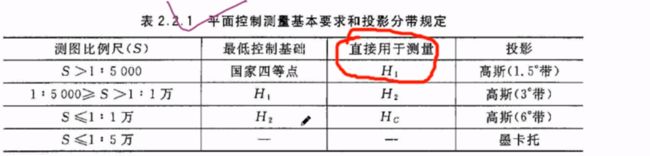
海洋平面控制测量的方法:三角测量、导线测量、卫星定位测量。(提示:和陆地平面测量差不多)
海洋平面控制点分为:一级(H1)、二级(H2)、测图点(Hc)。
一二级海洋控制点主要采用:GPS测量、导线测量、三角测量
测图点采用:GPS快速测量、导线、支导线、交会法测定。
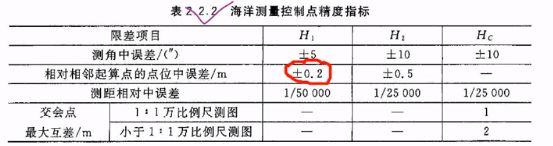
测定平面控制的主要控制点时:
1. 主要控制点采用常规的大地测量方法(三角测量,导线法),其相对误差不大于十万分之一;
2. 主要控制点使用卫星定位方法,在置信度为95%时,定位误差不超过10cm;
3. 次级控制点采用常规的大地测量方法(三角测量,导线法),其相对误差不大于万分之一;
4. 次要控制点使用卫星定位方法,在置信度为95%时,定位误差不超过50cm;
海洋高程控制测量的主要方法有:几何水准测量、测距高程导线测量、三角高程测量、GPS测量
(比控制点测量多了几何水准测量)
在使用GPS高程测量时,在平坦区域,已知水准点距离不超过15km,点数不少于4个
*海洋定位的方法:天文定位、光学定位、无线电定位、卫星定位、水声定位(5种)
海洋测量定位: 指利用2条以上的位置线,通过图上交会或解析计算的方法,得到海上某点位置的方法
(提示:交会是以 两已知点向,海上点进行测量,测出方位角、角度或距离)
海上位置线分为:方位位置线,角度位置线,距离位置线,距离差位置线。(4种)
海洋定位的主要方法:光学定位,无线电定位,卫星定位,水声定位。(4种)
光学定位的主要方法:前方交会,后方交会,侧方交会,极坐标法(4种)(几乎和全站仪的定位方法一样)
*无线电定位的主要方法:主要用于测距,测距差或两者混用
无线电定位按照工作原理:脉冲测距、相位双曲线、脉冲双曲线。
(提示:联想起载波相位测距)
无线电定位按照定位方式:两距离法定位、双曲线(距离差)法定位(2种)
(提示:对应无线电定位的主要方法)
*卫星定位:是目前海上定位的主要手段。
水声定位:根据声波的传播时间,或相位差定位。主要有:测距、测向(2种)
声波定为的工作方式:直接工作,中继工作,长基线工作,短基线工作、拖鱼工作
水文观测
潮差:随月球相位变化而变化, 每月有2次大潮,2次小潮
验潮站的数字?
水位观测的设备?
声速测量目的?
声波传播速度和什么有关?
海水声速测量的方法?
直接声速测量方法?
常用的声速测量仪有哪两种?(考过)