百度无人驾驶课程——Apollo开源模块讲解-笔记
为什么说无人驾驶这件事很困难?
现在为止民用领域对安全精度,以及对于各种复杂技术的集成度要求最高的。

Apollo包含的技术:
车顶的激光雷达,——advanced sensors
车一定要by wire control system 摆外线控
Lidar数据量非常大,所以需要强劲的处理器——onboard computing
车在路上跑的时候一定要和云端有链接——cloud cluster
Key tech:HD map

作用:
提供车道信息
提供红绿灯,交通标识,减速带位置信息。
由Intensive ma构建静态障碍物状态。
可以减低无人驾驶车对于道路信息的计算量,减少运动补偿的计算量
定位:
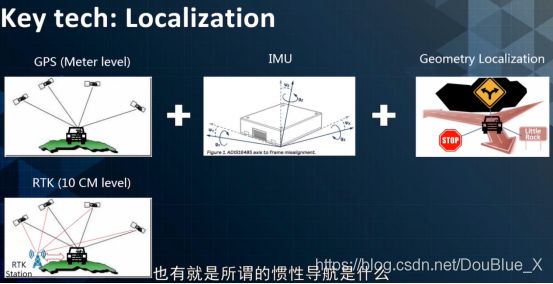
GPS+IMU+Geometry Localization(几何定位)
单独GPS定位
GPS是由4颗卫星进行定位,但是卫星定位电磁波经过大气的电离层衰减以及环境反射的衰减之后,会产生时延导致计算的位置偏差较大。
RTK定位
RTK使用固定基站,在基站与车辆范围较近(16公里以内),将基站定位与车辆定位进行差分,对GPS定位进行校准,使得GPS定位精度可以达到10厘米级别
GPS+IMU(惯性导航)
GPS定位由于其定位是没有历史信息的,会导致其在地图中进行跳变。为了抹平这种跳变,在得到车辆的速度,加速度,车辆角度等等信息之后可以采用物理计算计算相对位置,物理计算的位置会随着时间的推移误差越来越大,配合GPS的方向才可以进行持续精确定位。IMU和GPS配合使用——卡尔曼滤波
GPS+IMU+Geometry Localization(几何定位)
几何定位是为了保证在极端情况下GPS和IMU都无法使用时进行环境定位。算法——点云匹配。
Lidar定位

——点云
优点:激光反射得到每个点的精确距离。
缺点:对环境要求高,lidar使用的是纳米级别的激光束。毫米波雷达理论上可以绕过毫米级别的障碍物,对于烟雾干扰不大。但是lidar会受到烟雾的干扰。
无法识别颜色
雷达经常会绕过一些物体,会有误报。但是对于速度特别精准。
Camera可以看到颜色,无法判断距离。双目摄像头,50-60米误差在1-2米。

Lidar作为LV4发展的瓶颈。
没有大规模应用场景。
奥迪A8使用的ibeo。
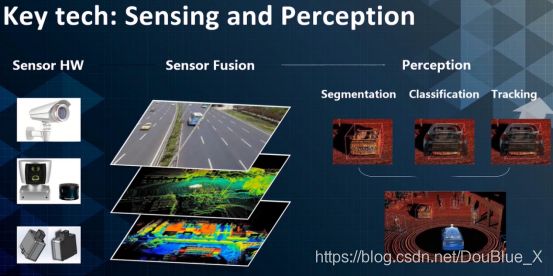
感知预测
Sensor fusion。
将所哟传感器看到的东西叠加在一起。
难点:非常精确的时间空间同步。
然后预测物体的轨迹。
规划和控制
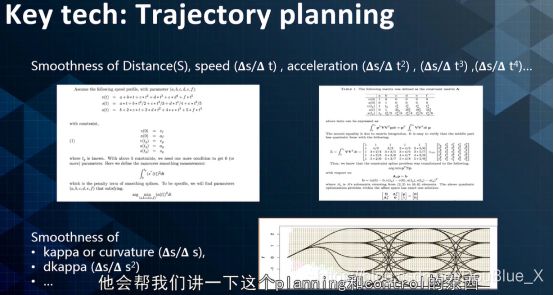
当我看到一些东西我将要做什么。
保证车的平滑——体感。
N阶平滑。速度平滑,加速度平滑……。
避障:
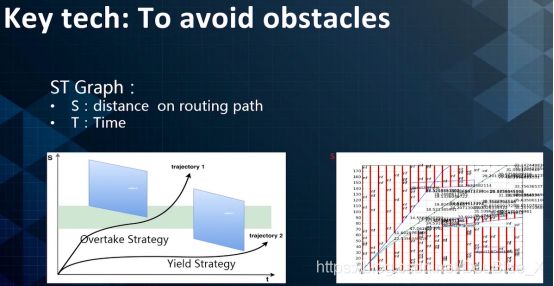
加速和减速的而曲线
ST图
云:

模拟:

路况上传到云。
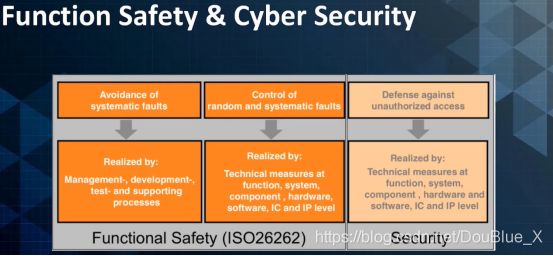
安全方面
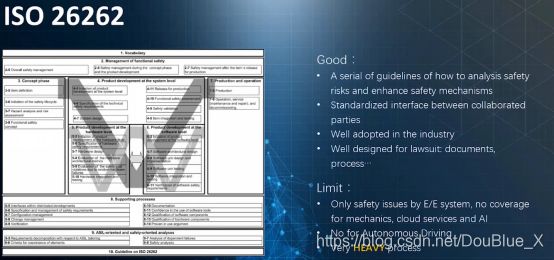
ISO26262
Good:非常结构化,高要求。ISO D级别(出人命)的要求。
硬件的故障率要达到10 fit(Failure in Time in one billion device-hours of operation)的要求,就是1fit就是一个billionhour里面出一次故障。10fit 10亿次一故障。
Bad:无法对无人驾驶cover,基本不可能过。所以不存在无人驾驶的规范。
规范。
Safe和security。
Function safe。汽车在完成我的功能的同时,他自己出现的设计缺陷或者random fault。导致的问题。
设计缺陷——systematic fault,无法容忍的错误,且硬件软件都有可能。
Random fault:不一定会出现。不可控因素导致。
Security:外部入侵。
行业标准——26262也叫做technical recommendation

并非法律准则
安全性:以人类的死亡率曲线,人类10岁的时候死亡率最低,比这个死亡率低十倍即为极限安全。
ISO26262
- 对技术的引导
- 商业广告
- 打官司的时候责任认定
它是一套规范化的流程。
给定了问题严重性的判断标准:
Exposure,controllable以及separatly。
Separatly:就是说有多少概率造成人员伤亡。死亡率高则等级高。
Esposure:这个事情是不是经常发现。越经常越高级
C:是否有机会控制。高级别控制的机会大。
如果都很高就是面的ISO D级别。
约束车的制造。
保证没有出现无驾驶员参与的加速减速以。流程就是V字。
ISO D级别的需要有多套的redundant system。
Apollo
被肯尼迪鼓励:我们作者一件事不是因为这件事简单,而是因为这件事困难。
命名:Apollo?

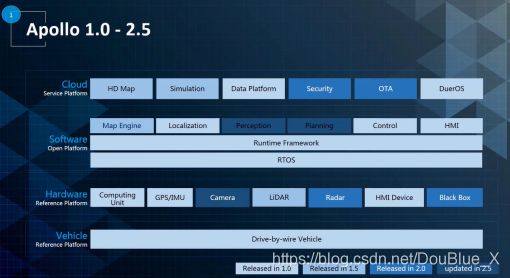
Apollo四层技术框架:
底层的Reference Vehicle Platform——线控
次一层的reference Hardware Platform——计算平台——各类sensor-HMI(人机交互)-黑盒子
百度优势
第二层的Open Software Platform-GitHub有-NTI 实验性的模块。
顶层的Cloud Service Platform——
Apollo1.0-寻迹自动驾驶。
应用:阿波牛。
Apollo1.5
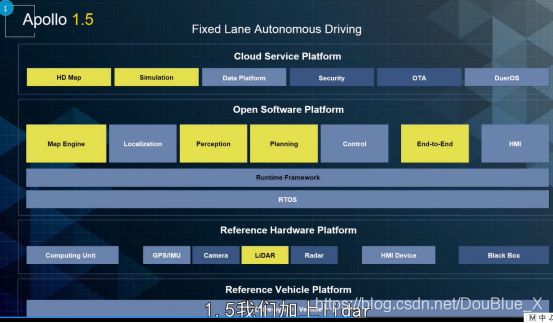
定车道自动驾驶。
应用:老年人自动驾驶的轮椅。
Apollo2.0
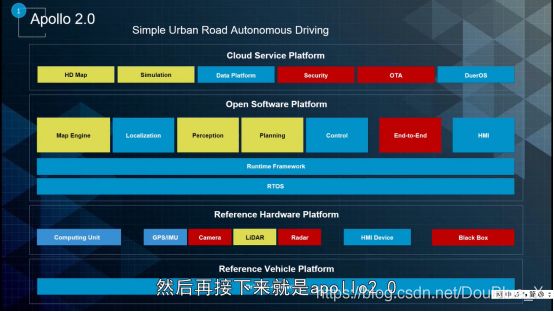
简单城市道路。没有很多复杂场景。
应用:扫地车
Apollo2.5
最大最活跃的无人驾驶社区。成就:

高速场景。
应用:长沙智能驾驶研究院。智能卡车驾驶。100公里每小时。
Apollo3.0:

量产解决方案,量产配置。