Apollo进阶课程 ⑨ | 业界的高精地图产品
目录
高精地图的格式规范-OpenDRIVE
HERE HD LIve Map
HERE HD LIVE MAP-MAP COLLECTION
HERE HD Live Map-Crowdsourced Update
HERE HD Live Map-Learning
HERE HD Live Map-Product
MobileEye
MobileEye-Pillars of Autonomous Driving
MobileEye-Map as back-up sensors
MobileEye-RoadBook
Google Waymo
原创: 阿波君 Apollo开发者社区1周前
上周阿波君为大家介绍了「Apollo进阶课程⑧ | 高精地图的格式规范」。详细讲解了NDS格式规范和OpenDRIVE格式规范。
高精地图的格式规范,即对采集到的地图如何进行一个完整的表述。
对此,目前最主流的通用格式规范分NDS和OpenDRIVE两种。此外还有日本OMP公司的格式规范。
NDS是一种非常全面的地图表述方式。由于NDS把数据库做了细分,每个细分后的产品都能够独立更新升级。
OpenDRIVE是目前国际上较通用的一种格式规范,由一家德国公司制定,在运用OpenDRIVE格式规范表述道路时,会涉及Section、Lane、Junction、Tracking四个概念。
百度在Apollo中也开发了自己的OpenDRIVE格式规范,并对该技术进行了改进,使之对开发者更加友好。
本周阿波君将与大家分享业界的高精地图产品相关内容。下面,欢迎开发者紧随阿波君的脚步,进入进阶课程第9期。
高精地图的格式规范-OpenDRIVE


HERE已能把地图做成一种基于云端的服务,精度高更新快
HERE最早是诺基亚旗下的一家公司,被诺基亚作为自己的高精地图使用,早先在欧美地区大概有80%的市场占有量。
在2013年微软收购诺基亚时,并未一并收购HERE,之后在2015年,HERE被宝马、奥迪、戴姆勒以30亿美金收购,再后来几经周折,被腾讯、四维相继入股。
HERE做地图之间长久,经历了由导航地图到高精地图的发展,整个体系相对完善。
据HERE本身介绍,HERE已能把地图做成一种基于云端的服务,精度高更新快。
HERE HD LIve Map


HERE HD Live Map的四大特性
基础地图的设计:基础地图是高清实时地图的基础。采集车辆配有GPS、激光雷达、相机等,每天采集28T的数据量,精度可达厘米。基于激光雷达、相机,建立16线程的Base Map。
众包更新(基于图像):利用众包车辆传感器采集行车路径、车道标志、道路边缘、路标、路面标志等。结合卫星图像等多种数据源,保持高清地图的新鲜感。
在云计算中映射学习:车辆大小、传感器设置和行驶路径不同。这些变化导致许多观察到的路边物体是相同的。这里的机器学习将这些变化的传感器数据聚合起来,以确定路边工件的精确位置。
更新的地图:创建并添加到地图数据库后,在这里将其发布到HD Live地图,并将必要的平面图发送回车辆,以便车辆能够准确和实时地表示路网。
HERE HD LIVE MAP-MAP COLLECTION
HERE HD Live Map采集方案
HERE采集车,集成了16线激光雷达+ Camera + RTK天线+IMU。HERE采集车会对地图进行预先制作,在数据采集后进行数据统计,经人工识别检查后,最后更新在地图中。
HERE HD Live Map-Crowdsourced Update


HERE HD Live Map众包方案
HERE地图采集的众包,可以做到非常高频的更新。
车端通过Sensor进行信息采集(可认为一种视觉方案),可对点、道路、标志标牌通过Feature进行提取,可有效帮助我们更快的对地图进行更新。
HERE有很好基础优势。作为一家传统图商,他的用户基数可以保证地图以更快的速度和形式更新。
HERE HD Live Map-Learning

HERE HD Live Map Learning方案
不同于利用神经网络的图像处理方法,HERE利用点云分割技术对Features进行分析。
在多次采集后,可将同一区域的点云补齐,但目前的图像处理方法已较为成熟。
而点云技术(点云SLAM、点云分割、点云特征提取等)仍需完善发展。
HERE HD Live Map-Product


HERE HD Live Map对地图的表述方式
HERE是如何表述他们的地图产品的呢?我们可以从图中看到他们对地图做了4个分层结构。
第一层是Road & Lane Model Layer(车道边界和区分界线)
A highly precise representation of road network.
第二层是Localization Model Layer(基于Camera或点云)
Help a vehicle to find its exact Position of lane it is driving in.
第三层是Activity Layer(动态信息层、道路实时信息)
Understanding dynamic events in the road network.
第四层是Analytics Layer(司机驾驶习惯分析)
Tell how humans actually behave in a piece of road.
在HERE的解决方案中,可以通过检测与定位约束纵向行驶信息,车道线约束横向行驶信息。
MobileEye


MobileEye也是业内非常知名的公司,标志中有英特尔的元素
MobileEye号称为全球25家知名车厂合作商提供更安全的技术解决方案,有2500万车辆在使用他们的技术,13家车厂正在使用MobileEye的技术在攻关自动驾驶。
相比于HERE,MobileEye更侧重于使用Camera,在图像处理方面也做得更好,使用视觉信息来进行辅助驾驶,是一种基于众包的视觉制图。
MobileEye-Pillars of Autonomous Driving


MobileEye把技术层次分为三个层次
感知:Mobileye的软件可以进行传感器融合——从摄像机传感器、雷达和激光雷达传感器中解读数据。
在图像处理方面,Mobileye经验丰富,使用自己独有算法是用来检测对象,确保安全行驶和系统决策。
L3以下的自动驾驶不需要高精地图,但是L3以上就看你使用的是基于Lidar还是Camera的方案了。
映射:自动驾驶汽车需要大量的系统冗余来处理无法预料的情况。在所有条件下,车辆相对于道路边界和交叉口的精确定位都需要高精地图。Mobileye提供基于REM的框架(REM™),它使用众包的策略。让用户能低成本地构建和快速更新高清地图。
驾驶策略:在Mobileye的驾驶策略中,他们认为,一旦一辆自动驾驶汽车能够感知周围的场景并在地图上进行定位,要解决的最后一件事情,就是学习和共享人类司机的驾驶策略。
Mobileye声称,传感、测绘和强大的计算能力赋予了自动驾驶车辆超人的视觉和反应时间。Mobileye对驾驶策略的强化学习,将提供多变量情况的分析方案,并且尽可能地逼近人类的行为和判断方式。
这证明Mobileye对于复制人类的驾驶行为还是很看重的,至少把其单独地作为一个数据层去阐述处理。
MobileEye-Map as back-up sensors

Mobileye知名的REM(道路经验管理系统)
说到Mobileye,要重点提及的就有他们的制图方案。
Mobileye的众包流程方案跟HERE的很像,只不过他们的方案更多是基于视觉来做。都是收集数据——上传云端——处理——下发车端。
Mobileye的REM系统(道路经验管理系统)非常知名,提供实时匿名众包的汽车数据,用于高精度地图的制作和使用。
Mobileye的REM解决方案由三层组成:
- 采集器(任何装有摄影机的车辆);
- 云端;
- 自动驾驶车辆。
相比HERE来说,MobilEye基于视觉的方案,使用时候最大的缺陷就是道路线的判断不连续。这会造成没有车道线了,车辆不知道怎么走了。
在复杂道路中,一旦出现红路灯等难以识别的物体,MobilEye所推崇的单靠视觉信息的解决方案难以支撑全自动驾驶技术。
MobileEye-RoadBook


MobilEye把方案采集处理的过程归纳为"路书"
MobilEye把REM采集、发送云端、处理、发回车端的过程称为“路书”。
搭载MobilEye的车端首先会对环境进行识别,然后进行语义分析和几何形状提取,将其压缩后打包上传,这个过程称为RSD。
经过REM系统采集处理的RSDs,其数据包大小可以达到10k/1公里,并达到“高精度低延时”的效果。
MobilEye还会将不同路段的数据打断上传。
这就是MobilEye的众包方案:所有的数据都在云端,大家一起来贡献相关数据,并且获得更好(高精度低延时)的数据回馈。
正是由于激光雷达的解决方案存在诸多的限制:高成本、低规模化和点云算法尚不完善。
在现行的网络条件下,MobilEye的RSD方案“至少”看起来让自动驾驶这件事儿变得更加可行了。
不过在MobilEye的对外公布的演示视频中,我们也可以看到其场景都是非城市的简单场景。在更复杂的环境中,其解决方案还是存在局限性。
Google Waymo

谷歌Waymo业内知名,但其对外披露的信息极少
谷歌在业内做自动驾驶非常早,但是其对外披露的信息极少。
这导致业界和开发者基本对于谷歌的解决方案基本“只能靠猜”。
在谷歌透露出来的地图解决方案中,我们可以发现在高精地图的层面上,大家对于道路信息的描述基本都是一致的。
比如说Lane、路口虚拟线和道路停止线的理念,谷歌的解决方案本质上也是为自动驾驶提供一个可运行的静态环境。

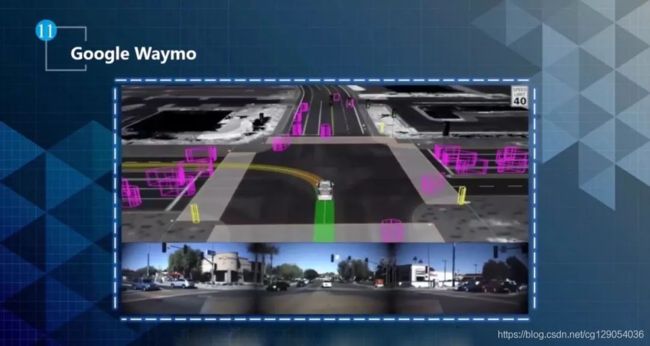
谷歌Waymo所透露出来的路测画面
谷歌的地图解决方案中,谷歌将地图提供的静态环境和基于感知的动态环境(人物、车辆、道路标志)等信息结合在一起。
使搭载Waymo的无人车完成对环境的感知。
谷歌同样将红绿灯感知为框体,并且将人行横道的识别放在非常重要的位置。
谷歌将根据地图提供的静态信息确定红绿灯的位置,基于感知到的红路灯状态为其打上标签(红灯禁止或者是绿灯通行),再为车辆决策提供依据,并且有蓝色的预测轨迹为车辆规划行驶路径。
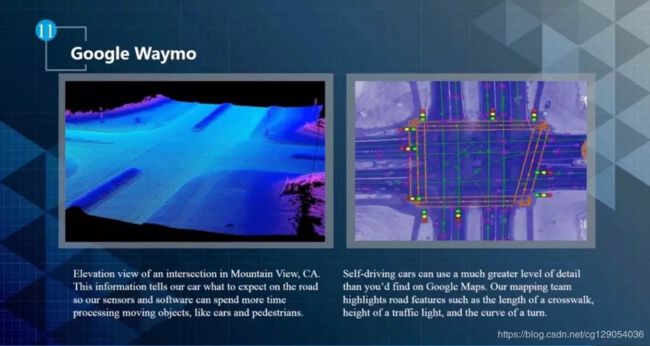
谷歌Waymo所透露的自研高精地图
在谷歌对于高精地图的阐述中,他们的研发团队认为,仅有矢量数据是不够的。
业界的所推崇的矢量类型地图对于谷歌来说过于传统。他们更期待自己能够研发出栅格式的高精地图。
这种地图记录了所有道路上的物体信息,并且将不存于静态地图中的动态物体自动过滤,由此降低车端感知识别的难度,达到更好的检测效果。
至于谷歌所透露出来的环境地图,其红绿灯和停止线的设置,跟业界的标准基本一致。
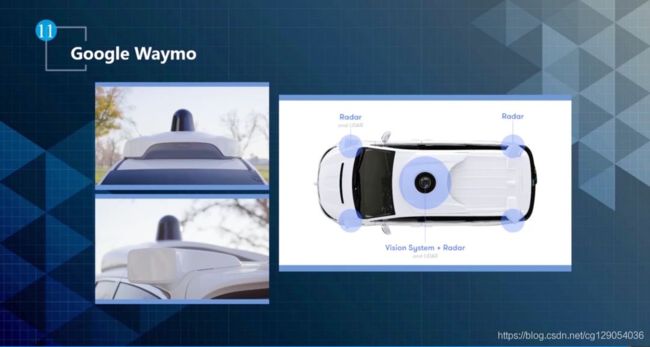
谷歌Waymo声称其降低了车载雷达的综合成本
谷歌Waymo的实验车大家都非常熟悉。
其车辆顶部可能搭载了激光雷达+视觉系统,车辆四周搭载了激光雷达。
其整体方案也是为激光雷达+视觉融合。
但是谷歌自研的激光雷达据称可以检测到两个足球场(240米)外的物体数据。
并且整体的生产成本比Velodyne的64线激光雷达的售价(8万美元)低90%左右,这对于开发者来说是非常诱人的价格。

阿波君说:
在学习过程中,开发者不仅可以在Apollo开发者社区小程序上对课程内容进行提问,还可以在开发者微信群中交流学习心得,共同学习自动驾驶技术。
开发者社区还将在公众号上定期推送课程相关的技术干货,全程陪伴大家共同进步。祝Apollo开发者们顺利完成《Apollo自动驾驶进阶课程》的学习,在自动驾驶道路上越走越远!
阿波君还欢迎大家在小程序内晒出学习笔记,也可以加入开发者交流社群与大家交流互动,有好礼相送!

观看/阅读完该节课程后在开发者社群及小程序「社区问答」版块内上传你的课程笔记截图;手写笔记/电脑文档均可即可联社区小助手获取百度周边纪念品1份。赶快来撩吧~比心~