状态估计第二讲:线性高斯系统的状态估计问题
来源:深蓝学院《机器人学中的状态估计》
本讲的核心问题就是线性系统卡尔曼滤波的推导。
离散时间的批量估计
线性高斯模型
运动方程: x k = A k − 1 x k − 1 + v k + w k , k = 1 , 2 … … K x_k=A_{k-1}x_{k-1}+v_k+w_k,k=1,2……K xk=Ak−1xk−1+vk+wk,k=1,2……K
观测方程: y k = C k x k + n k , k = 0 , 1 , 2 … … K y_k=C_kx_k+n_k,k=0,1,2……K yk=Ckxk+nk,k=0,1,2……K
各个变量的意义:
系统状态: x k ∈ R N x_k\in\R^N xk∈RN
初始状态: x 0 ∈ R N ∼ N ( x 0 ˇ , P 0 ˇ ) x_0\in\R^N{\sim} N(\check{x_0},\check{P_0}) x0∈RN∼N(x0ˇ,P0ˇ)
输入: v k ∈ R N v_k\in\R^N vk∈RN
状态转移矩阵: A k − 1 A_{k-1} Ak−1
过程噪声: w k ∈ R N ∼ N ( 0 , Q k ) w_k\in\R^N{\sim}N(0,Q_k) wk∈RN∼N(0,Qk)
观测矩阵: C K C_K CK
观测噪声: n k ∈ R N ∼ N ( 0 , R k ) n_k\in\R^N{\sim}N(0,R_k) nk∈RN∼N(0,Rk)
观测量: y k ∈ R N y_k\in\R^N yk∈RN
状态估计问题: 通过初始状态、各时刻的观测数据、输入数据,估计系统的真实状态
最大后验估计(MAP)
MAP问题:已知输入和观测,求最大概率的状态
x ^ = a r g m a x x p ( x ∣ y , v ) \hat{x}=arg\underset{x}{max}p(x|y,v) x^=argxmaxp(x∣y,v)
用贝叶斯公式重写上述公式
x ^ = a r g m a x x p ( y ∣ x , v ) ∗ p ( x ∣ v ) p ( y ∣ v ) = a r g m a x x p ( x ∣ v ) p ( y ∣ x ) \hat{x}=arg\underset{x}{max}\frac{p(y|x,v)*p(x|v)}{p(y|v)}=arg\underset{x}{max}p(x|v)p(y|x) x^=argxmaxp(y∣v)p(y∣x,v)∗p(x∣v)=argxmaxp(x∣v)p(y∣x)
由于各个时刻观测、输入的噪声都是无关的,上面两个项可以因式分解:
p ( x ∣ v ) = p ( x 0 ∣ x ˇ 0 ) ∏ k = 1 K p ( x k , ∣ x k − 1 , v k ) p(x|v)=p(x_0|\check x_0)\prod_{k=1}^Kp(x_k,|x_{k-1},v_k) p(x∣v)=p(x0∣xˇ0)∏k=1Kp(xk,∣xk−1,vk)
p ( y ∣ x ) = ∏ k = 0 K p ( y k ∣ x k ) p(y|x)=\prod_{k=0}^Kp(y_k|x_k) p(y∣x)=∏k=0Kp(yk∣xk)
对目标函数取对数可得:
ln ( p ( y ∣ x ) p ( x ∣ v ) ) = ln p ( x 0 ∣ x 0 ˇ ) + ∑ k = 1 K ln p ( x k ∣ x k − 1 , v k ) + ∑ k = 0 K ln p ( y k ∣ x k ) \ln(p(y|x)p(x|v))=\ln p(x_0|\check{x_0})+\sum_{k=1}^K \ln p(x_k|x_{k-1},v_k)+\sum_{k=0}^K \ln p(y_k|x_k) ln(p(y∣x)p(x∣v))=lnp(x0∣x0ˇ)+∑k=1Klnp(xk∣xk−1,vk)+∑k=0Klnp(yk∣xk)
将概率化成相应的数学形式有:
ln p ( x 0 ∣ x ˇ 0 ) = − 1 2 ( x 0 − x ˇ 0 ) T P ˇ 0 − 1 ( x 0 − x ˇ 0 ) − 1 2 ln ( ( 2 π ) N d e t P ˇ 0 ) \ln p(x_0|\check x_0)=- \frac{1}{2}(x_0-\check x_0)^T\check P_0^{-1}(x_0-\check x_0)- \frac{1}{2}\ln((2\pi)^Ndet\check P_0) lnp(x0∣xˇ0)=−21(x0−xˇ0)TPˇ0−1(x0−xˇ0)−21ln((2π)NdetPˇ0)
ln p ( x k ∣ x k − 1 , v k ) = − 1 2 ( x k − A k − 1 x k − 1 − v k ) T Q k − 1 ( x k − A k − 1 x k − 1 − v k ) − 1 2 ln ( ( 2 π ) N d e t Q k ) \ln p(x_k|x_{k-1},v_k)=-\frac{1}{2}(x_k-A_{k-1}x_{k-1}-v_k)^TQ_k^{-1}(x_k-A_{k-1}x_{k-1}-v_k)-\frac{1}{2}\ln((2\pi)^NdetQ_k) lnp(xk∣xk−1,vk)=−21(xk−Ak−1xk−1−vk)TQk−1(xk−Ak−1xk−1−vk)−21ln((2π)NdetQk)
ln p ( y k ∣ x k ) = − 1 2 ( y k − C k x k ) T R k − 1 ( y k − C k x k ) − 1 2 ln ( ( 2 π ) M d e t R k ) \ln p(y_k|x_k)=- \frac{1}{2}(y_k-C_kx_k)^TR_k^{-1}(y_k-C_kx_k)- \frac{1}{2}\ln ((2\pi)^MdetR_k) lnp(yk∣xk)=−21(yk−Ckxk)TRk−1(yk−Ckxk)−21ln((2π)MdetRk)
去掉与 x x x无关的项,定义如下等式:
J v , k ( x ) = { − 1 2 ( x 0 − x ˇ 0 ) T P ˇ 0 − 1 ( x 0 − x ˇ 0 ) , k = 0 − 1 2 ( x k − A k − 1 x k − 1 − v k ) T Q k − 1 ( x k − A k − 1 x k − 1 − v k ) , k = 1 , … … K J_{v,k}(x)=\begin{cases} - \frac{1}{2}(x_0-\check x_0)^T\check P_0^{-1}(x_0-\check x_0) ,k=0\\ -\frac{1}{2}(x_k-A_{k-1}x_{k-1}-v_k)^TQ_k^{-1}(x_k-A_{k-1}x_{k-1}-v_k),k=1,……K \end{cases} Jv,k(x)={−21(x0−xˇ0)TPˇ0−1(x0−xˇ0),k=0−21(xk−Ak−1xk−1−vk)TQk−1(xk−Ak−1xk−1−vk),k=1,……K
J y , k ( x ) = − 1 2 ( y k − C k x k ) T R k − 1 ( y k − C k x k ) , k = 0 , … … , K J_{y,k}(x)=- \frac{1}{2}(y_k-C_kx_k)^TR_k^{-1}(y_k-C_kx_k),k=0,……,K Jy,k(x)=−21(yk−Ckxk)TRk−1(yk−Ckxk),k=0,……,K
于是目标函数变成最小二乘问题:
x ^ = arg m x a x J x , J x = ∑ k = 0 K ( J v , k ( x ) + J y , k ( x ) ) \hat x=\arg \underset{x}maxJ_x, J_x=\sum_{k=0}^K(J_{v,k}(x)+J_{y,k}(x)) x^=argxmaxJx,Jx=∑k=0K(Jv,k(x)+Jy,k(x))
写成更紧凑的矩阵形式:
把运动和观测写在一起:
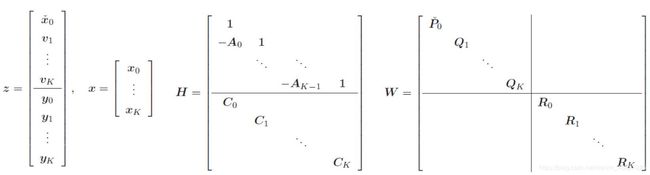
z = H x + W z=Hx+W z=Hx+W
提升形式的目标函数:
J ( x ) = 1 2 ( z − H x ) T W − 1 ( z − H x ) J(x)=\frac {1}{2}(z-Hx)^T W^{-1}(z-Hx) J(x)=21(z−Hx)TW−1(z−Hx)
该式是个二次的,求其最小值,只令自变量最小值导数为0:
∂ J ( x ) ∂ x T = − H T W − 1 ( z − H x ^ ) = 0 \frac {\partial J(x)}{\partial {x^T}}=-H^TW^{-1}(z-H\hat x)=0 ∂xT∂J(x)=−HTW−1(z−Hx^)=0
⇒ ( H T W − 1 H ) x ^ = H T W − 1 z \Rightarrow(H^TW^{-1}H)\hat x=H^TW^{-1}z ⇒(HTW−1H)x^=HTW−1z
贝叶斯推断
在LG(线性高斯)系统中,可以根据运动方程和观测方程显式写出状态变量分布的变化过程。
单个时刻:
x k = A k − 1 x k − 1 + v k + w k x_k=A_{k-1}x_{k-1}+v_k+w_k xk=Ak−1xk−1+vk+wk
提升形式:
x = A ( v + w ) x=A(v+w) x=A(v+w)
A = [ 1 A 0 1 A 1 A 0 A 1 1 ⋮ ⋮ ⋮ A K − 1 … A 0 A K − 2 … A 1 A K − 2 … A 2 … 1 A K − 1 … A 0 A K − 1 … A 1 A K − 1 … A 2 … A K − 1 1 ] A=\begin{bmatrix} 1 \\ A_0 & 1 \\ A_1A_0 & A_1 & 1 \\ \vdots &\vdots &\vdots \\ A_{K-1}…A_0 & A_{K-2}…A_1 & A_{K-2}…A_2 & … & 1 \\ A_{K-1}…A_0 &A_{K-1}…A_1 & A_{K-1}…A_2&…&A_{K-1} & 1\end{bmatrix} A=⎣⎢⎢⎢⎢⎢⎢⎢⎡1A0A1A0⋮AK−1…A0AK−1…A01A1⋮AK−2…A1AK−1…A11⋮AK−2…A2AK−1…A2……1AK−11⎦⎥⎥⎥⎥⎥⎥⎥⎤
提升形式里,右侧只有v和w,容易求得其均值和协方差:
x ˇ = E [ x ] = E [ A ( v + w ) ] = A v \check x=E[x]=E[A(v+w)]=Av xˇ=E[x]=E[A(v+w)]=Av
P ˇ = E [ ( x − E [ x ] ) ( x − E [ x ] ) T ] = A Q A T \check P=E[(x-E[x])(x-E[x])^T]=AQA^T Pˇ=E[(x−E[x])(x−E[x])T]=AQAT
先验部分写为: p ( x ∣ v ) = N ( x ˇ , P ˇ ) = N ( A v , A Q A T ) p(x|v)=N(\check x,\check P)=N(Av,AQA^T) p(x∣v)=N(xˇ,Pˇ)=N(Av,AQAT)
观测模型:
单次观测: y k = C k x k + n k y_k=C_kx_k+n_k yk=Ckxk+nk
提升形式: y = C x + n , C = d i a g ( C 0 , C 1 , … … C K ) y=Cx+n,C=diag(C_0,C_1,……C_K) y=Cx+n,C=diag(C0,C1,……CK)
联合分布:
p ( x , y ∣ v ) = N ( [ x ˇ C x ˇ ] , [ P ˇ P ˇ C T C P ˇ C P ˇ C T + R ] ) p(x,y|v)=N(\begin{bmatrix} \check x \\ C\check x\end{bmatrix},\begin{bmatrix} \check P & \check PC^T \\ C\check P & C\check PC^T+R\end{bmatrix}) p(x,y∣v)=N([xˇCxˇ],[PˇCPˇPˇCTCPˇCT+R])
由第一章的高斯推断可得:
p ( x ∣ v , y ) = N ( x ˇ + P ˇ C T ( C P ˇ C T + R ) − 1 ( y − C x ˇ ) , P ˇ − P ˇ C T ( C P ˇ C T + R ) − 1 C P ˇ ) p(x|v,y)=N(\check x+\check PC^T(C\check PC^T+R)^{-1}(y-C\check x),\check P- \check PC^T(C\check PC^T+R)^{-1}C\check P) p(x∣v,y)=N(xˇ+PˇCT(CPˇCT+R)−1(y−Cxˇ),Pˇ−PˇCT(CPˇCT+R)−1CPˇ)
带入SMW式进行化简可得:
p ( x ∣ v , y ) = N ( ( P ˇ − 1 + C T R − 1 C ) − 1 ( P ˇ − 1 x ˇ + C T R − 1 y ) ⏟ , ( P ˇ − 1 + C T R − 1 C ) − 1 ) ⏟ 均 值 x ^ 后 验 协 方 差 P ^ p(x|v,y)=N(\begin{matrix} (\underbrace{\check P^{-1}+C^TR^{-1}C)^{-1}(\check P^{-1}\check x+C^TR^{-1}y)} , &\underbrace {(\check P^{-1}+C^TR^{-1}C)^{-1})} \\ {均值\hat x} & 后验协方差\hat P\end{matrix} p(x∣v,y)=N(( Pˇ−1+CTR−1C)−1(Pˇ−1xˇ+CTR−1y),均值x^ (Pˇ−1+CTR−1C)−1)后验协方差P^
均值部分: ( P ˇ − 1 + C T R − 1 C ) x ^ = P ˇ − 1 x ˇ + C T R − 1 y (\check P^{-1}+C^TR^{-1}C)\hat x=\check P^{-1}\check x+C^TR^{-1}y (Pˇ−1+CTR−1C)x^=Pˇ−1xˇ+CTR−1y
代入 x ˇ = A v \check x=Av xˇ=Av和 P ˇ − 1 = A − T Q − 1 A − 1 \check P^{-1}=A^{-T}Q^{-1}A^{-1} Pˇ−1=A−TQ−1A−1
得均值式: ( A − T Q − 1 A − 1 + C T R − 1 C ) x ^ = A − T Q − 1 v + C T R − 1 y (A^{-T}Q^{-1}A^{-1}+C^{T}R^{-1}C)\hat x=A^{-T}Q^{-1}v+C^{T}R^{-1}y (A−TQ−1A−1+CTR−1C)x^=A−TQ−1v+CTR−1y
由于A的结构,A逆具有特殊形式:
A − 1 = [ 1 − A 0 1 − A 1 1 − A 2 ⋱ ⋱ 1 − A K − 1 1 ] A^{-1}=\begin{bmatrix} 1\\ -A_0 & 1 \\ &-A_1 & 1 \\ & & -A_2 & \ddots \\ & & \ddots & 1 \\ & & & -A_{K-1} & 1\end{bmatrix} A−1=⎣⎢⎢⎢⎢⎢⎢⎡1−A01−A11−A2⋱⋱1−AK−11⎦⎥⎥⎥⎥⎥⎥⎤
按照均值式,定义矩阵:
z = [ v y ] , H = [ A − 1 C ] , W = [ Q R ] z=\begin{bmatrix} v \\ y\end{bmatrix},H=\begin{bmatrix} A^{-1} \\ C\end{bmatrix},W=\begin{bmatrix} Q & \\ &R\end{bmatrix} z=[vy],H=[A−1C],W=[QR]
可得: ( H T W − 1 H ) x ^ = H T W − 1 z (H^TW^{-1}H)\hat x=H^TW^{-1}z (HTW−1H)x^=HTW−1z与MAP结果完全一致!
MAP结果和贝叶斯推断结果一致,说明了什么?
• MAP只关心达到最大后验概率的一个点,这个点的状态称为MAP估计。
• 而贝叶斯推断写出了p(x|y,v)的完整形式,它是一个高斯分布,其均值与MAP估计相等;同时,给出了这个估计的协方差。
• 如果我们只关心状态估计变量取值,那么MAP给出了后验分布的模(Mode),贝叶斯推断给出了均值。
• 而在LG系统中,二者是一样的,使得这两类方法给出了同样的结果。
LG系统最优估计结果唯一的条件: r a n k ( H T W − 1 H ) = N ( K + 1 ) , N ( K + 1 ) 表 示 x 的 维 度 rank(H^TW^{-1}H)=N(K+1),N(K+1)表示x的维度 rank(HTW−1H)=N(K+1),N(K+1)表示x的维度。
由于协方差矩阵的对称正定性,即要求 r a n k ( H T H ) = r a n k ( H T ) = N ( K + 1 ) rank(H^TH)=rank(H^T)=N(K+1) rank(HTH)=rank(HT)=N(K+1)
H的具体形式取决于问题有没有0时刻的先验条件。
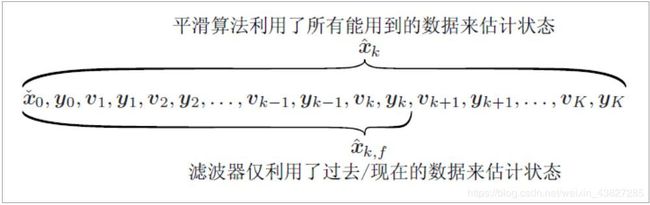
离散时间的递归平滑算法
很多在线问题当中(比如定位),我们有上一个时刻的先验估计,希望通过这个时刻的控制和观测,计算这个时刻的状态估计。这里介绍递归解法。递归解法的基础是批量问题的解法。
批量问题的核心是用Cholesky分解法求解方程 ( H T W − 1 H ) x ^ = H T W − 1 z (H^TW^{-1}H)\hat x=H^TW^{-1}z (HTW−1H)x^=HTW−1z
Cholesky解方程的流程:
•Cholesky分解: H T W − 1 H = L L T H^T W^{-1}H=LL^T HTW−1H=LLT
• 先解: L d = H T W − 1 z Ld=H^TW^{-1}z Ld=HTW−1z 得到d,从上往下解;
• 再解: L T x ^ = d L^T\hat x=d LTx^=d得到最优状态,从下往上解;
• 注意这种解法对一般线性方程也是有效的,不光是针对状态估计问题
• 这两步分别称为前向过程和后向过程(forward/backward)。
迭代法是建立在Cholesky基础上,最终得到经典的RTS Smoother:
前向: k = 1 , … … , K k=1,……,K k=1,……,K
P ˇ k , f = A k − 1 P ^ k − 1 , f A k − 1 T + Q k \check P_{k,f}=A_{k-1}\hat P_{k-1,f}A_{k-1}^T+Q_k Pˇk,f=Ak−1P^k−1,fAk−1T+Qk
x ˇ k , f = A k − 1 x ^ k − 1 , f + v k \check x_{k,f}=A_{k-1}\hat x_{k-1,f}+v_k xˇk,f=Ak−1x^k−1,f+vk
K k = P ˇ k , f C k T ( C k P ˇ k , f C k T + R k ) − 1 K_k=\check P_{k,f}C_k^T(C_k\check P_{k,f}C_k^T+R_k)^{-1} Kk=Pˇk,fCkT(CkPˇk,fCkT+Rk)−1
P ^ k , f = ( 1 − K k C k ) P ˇ k , f \hat P_{k,f}=(1-K_kC_k)\check P_{k,f} P^k,f=(1−KkCk)Pˇk,f
x ^ k , f = x ˇ k , f + K k ( y k − C k x ˇ k , f ) \hat x_{k,f}=\check x_{k,f}+K_k(y_k-C_k\check x_{k,f}) x^k,f=xˇk,f+Kk(yk−Ckxˇk,f)
后向: k = K , … … , 1 k=K,……,1 k=K,……,1
x ^ k − 1 = x ^ k − 1 , f + P ^ k − 1 , f A k − 1 T P ˇ k , f − 1 ( x ^ k − x ˇ k , f ) \hat x_{k-1}=\hat x_{k-1,f}+\hat P_{k-1,f}A_{k-1}^T\check P_{k,f}^{-1}(\hat x_k-\check x_{k,f}) x^k−1=x^k−1,f+P^k−1,fAk−1TPˇk,f−1(x^k−xˇk,f)
离散时间的滤波算法
• RTS Smoother是无法在线运行的(非因果的Not causal)
• 它的后向迭代过程使用下个时刻的信息更新之前的估计
• 初始值中需要知道x(K)的后验
利用MAP和贝叶斯推断均可推导出卡尔曼滤波,在此只给出卡尔曼滤波最终形式:
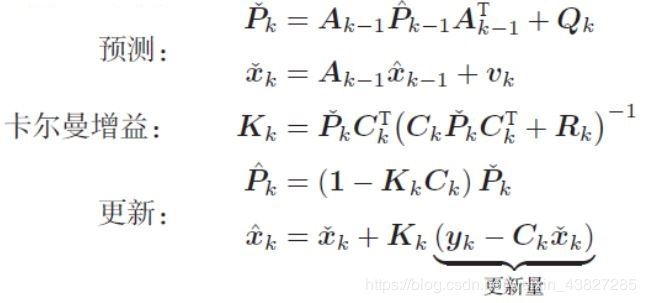
关于卡尔曼滤波器的结论
• 卡尔曼滤波器给出了LG系统下最优线性无偏估计(Best Linear Unbiased Estimate, BLUE)
• 需要有初始状态
• 卡尔曼滤波器即RTS Smoother的前向部分
• 在非线性场合下,我们会使用扩展卡尔曼滤波器(EKF),但此时MAP、贝叶斯推断、EKF给出的结果均会不一样