Proteus仿真—51单片机实现AC信号测频、显示、双机通信
文章目录
- 一.原理图部分
- 二.源码部分
- 单片机1
- 单片机2
在Proteus仿真软件里面使用STC89C52实现指定频率的AC信号的测频、显示、双机通信。
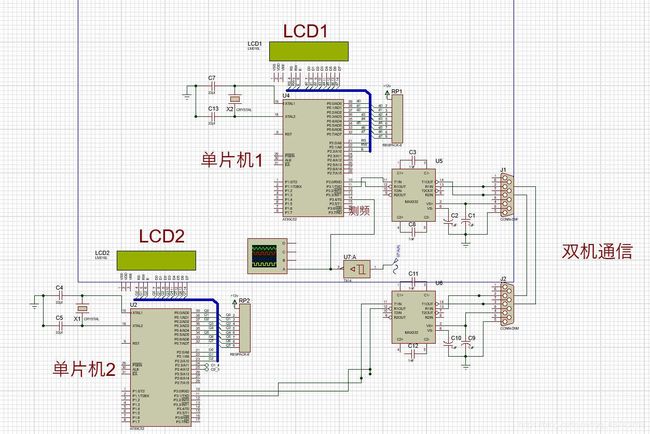
一.原理图部分
整体的电路图如示:

DC-AC电路部分的输出就使用信号源直接模拟了。
原理图如下:
运行结果如下:
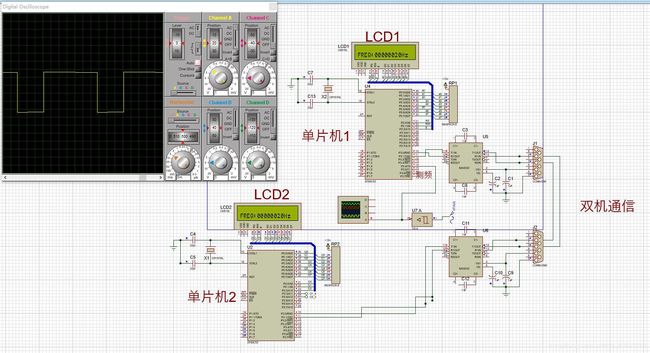
可以准确测量出结果,并在LCD上显示,单片机1测量到频率后通过串口发送给单片机2,然后在单片机2的LCD上再次显示。
二.源码部分
单片机1
/*单片机1功能:
*1.测量AC的频率20Hz,T0检测上升沿、T1进行计时
*2.LED显示实时测量频率
*3.与单片机2串口通信,T2提供波特率
*晶振频率:11.0592MHz
*/
#include 单片机2
本来单片机2还负责给DC-AC电路产生控制信号的,在这里我忽略了DC-AC电路部分,所以控制信号的代码可有可无。
/*单片机2功能:
*1.与单片机1进行串口通讯,接收测量的AC频率
*2.LED显示实时单片机1传回的测量频率
*3.为DC-AC逆置电路提供信号
*晶振频率:11.0592MHz
*/
#include