Savitsky-Golay滤波器及源码实现
SG平滑算法是由Savizkg和Golag提出来的。基于最小二乘原理的多项式平滑算法,也称卷积平滑。为啥叫多项式平滑呢?且看下去。
下面使用五点平滑算法来说明平滑过程
原理很简单如图:
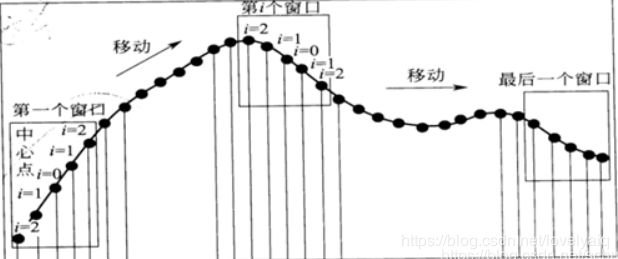
把光谱一段区间的等波长间隔的5个点记为X集合,多项式平滑就是利用在波长点为 X m − 2 , X m − 1 , X m , X m + 1 , X m + 2 X_{m-2},X_{m-1},X_m,X_{m+1},X_{m+2} Xm−2,Xm−1,Xm,Xm+1,Xm+2的数据的多项式拟合值来取代 X m X_m Xm,,然后依次移动,直到把光谱遍历完。
Savitsky-Golay卷积平滑关键在于矩阵算子的求解。
假设滤波窗口的宽度为n = 2m+1, 各测量点x = (-m, -m+1, ,0, , m - 1, m), 采用k-1次 多项式对窗口内的数据点进行拟合:
y = a 0 + a 1 x + a 2 x + . . . . + a k − 1 x k − 1 y = a_0 + a_1x + a_2x + .... + a_{k-1}x^{k-1} y=a0+a1x+a2x+....+ak−1xk−1
于是就有了n个这样的方程,组成k元线性方程组,要使方程组有解,应该满足n大于等于k,一般选择n > k。通过最小二程法拟合确定参数A。由此得到:
{ y − m y − m + 1 . . . y m } = { 1 − m . . . ( − m ) k − 1 1 − m + 1 . . . ( − m + 1 ) k − 1 . . . 1 m . . . ( m ) k − 1 } { a 0 a 1 . . . a k − 1 } + { e − m e − m + 1 . . . e m } \left\{ \begin{matrix} y_{-m} \\ y_{-m + 1} \\ .\\ .\\ .\\ y_{m} \end{matrix} \right\} = \left\{ \begin{matrix} 1 & -m & ... &(-m)^{k-1}\\ 1 & -m + 1 & ... &(-m + 1)^{k-1} \\ .\\ .\\ .\\ 1 & m & ... &(m)^{k-1} \end{matrix} \right\} \left\{ \begin{matrix} a_0\\ a_1\\ .\\ .\\ .\\ a_{k-1} \end{matrix} \right\} + \left\{ \begin{matrix} e_{-m}\\ e_{-m + 1}\\ .\\ .\\ .\\ e_{m} \end{matrix} \right\} ⎩⎪⎪⎪⎪⎪⎪⎨⎪⎪⎪⎪⎪⎪⎧y−my−m+1...ym⎭⎪⎪⎪⎪⎪⎪⎬⎪⎪⎪⎪⎪⎪⎫=⎩⎪⎪⎪⎪⎪⎪⎨⎪⎪⎪⎪⎪⎪⎧11...1−m−m+1m.........(−m)k−1(−m+1)k−1(m)k−1⎭⎪⎪⎪⎪⎪⎪⎬⎪⎪⎪⎪⎪⎪⎫⎩⎪⎪⎪⎪⎪⎪⎨⎪⎪⎪⎪⎪⎪⎧a0a1...ak−1⎭⎪⎪⎪⎪⎪⎪⎬⎪⎪⎪⎪⎪⎪⎫+⎩⎪⎪⎪⎪⎪⎪⎨⎪⎪⎪⎪⎪⎪⎧e−me−m+1...em⎭⎪⎪⎪⎪⎪⎪⎬⎪⎪⎪⎪⎪⎪⎫
使用矩阵表示:
Y ( 2 m + 1 ) ∗ 1 = X ( 2 m + 1 ) ∗ k ∗ A k ∗ 1 + E ( 2 m + 1 ) ∗ 1 Y_{(2m + 1)*1} = X_{(2m + 1)*k} * A_{k*1} + E_{(2m + 1)*1} Y(2m+1)∗1=X(2m+1)∗k∗Ak∗1+E(2m+1)∗1
A 的最小二乘解为:
A = ( X T ∗ X ) − 1 ∗ X T ∗ Y A = (X^T * X)^{-1} * X^T * Y A=(XT∗X)−1∗XT∗Y
则Y的滤波值为:
Y = X ∗ A = X ∗ ( X T ∗ X ) − 1 ∗ X T ∗ Y = B ∗ Y Y = X * A = X * (X^T * X)^{-1} * X^T * Y = B *Y Y=X∗A=X∗(XT∗X)−1∗XT∗Y=B∗Y
其中 B = X ∗ ( X T ∗ X ) − 1 ∗ X T B= X * (X^T * X)^{-1} * X^T B=X∗(XT∗X)−1∗XT
所以,我们的目标就是求解B矩阵。
这里通过输入二位数组,对每一行进行S-G滤波。并且每行采取最近邻补齐,所有的补齐方式如下,读者可以自行实现其他方式。
mode | Ext | Input | Ext
-----------+---------+------------------------+---------
'mirror' | 4 3 2 | 1 2 3 4 5 6 7 8 | 7 6 5
'nearest' | 1 1 1 | 1 2 3 4 5 6 7 8 | 8 8 8
'constant' | 0 0 0 | 1 2 3 4 5 6 7 8 | 0 0 0
'wrap' | 6 7 8 | 1 2 3 4 5 6 7 8 | 1 2 3
在计算矩阵时,使用了Opencv矩阵,例如求矩阵转置和求逆
定义S-G滤波函数
需要注意的是,order必须要比滑动窗口要小,且滑动窗口不能为偶数。
void SavitskyGolaySmoothing(float *arr,int window_size, int order, int rows, int cols){
if(window_size % 2 == 0){
throw std::logic_error("only odd window size allowed");
}
if(order >= window_size){
throw std::logic_error("Order must < window_size");
}
cv::Mat A = cv::Mat::zeros(window_size, order, CV_32FC1);
cv::Mat A_T, A_INV, B;
cv::Mat kernel;
cv::Mat result = cv::Mat::zeros(window_size, 1, CV_32FC1);
int step = int((window_size - 1)/2);
for(int i = 0; i < window_size; i++){
for(int j = 0 ; j < order; j++){
float x = pow(-step + i, j);
A.at(i,j) = x;
}
}
A_T = A.t();
A_INV = (A_T * A).inv();
B = A * A_INV * A_T;
B.row(step).copyTo(kernel);
float *wrap_data = new float[step*2 + cols];
for(int row =0; row < rows; row++){
//Extend start data, size is step
for(int n = 0; n < step; n++)
{
wrap_data[n] = arr[row * cols];
}
//Copy input data
for(int col =0; col < cols; col++){
wrap_data[col + step] = arr[row * cols + col];
}
//Extend end data, size is step
for(int n = 0; n < step; n++){
wrap_data[cols + step + n] = arr[row * cols + cols -1];
}
for(int m = step; m < step + cols; m++){
for(int n = -step, j = 0; n <=step; n++, j++){
result.at(0, j) = wrap_data[m + n];
}
arr[row * cols + m - step] = cv::Mat(kernel * result).at(0 ,0);
}
}
delete []wrap_data;
}
随机输入一组数据,并将结果打印处理,从结果可以看出,滤波后的数据比较平滑。
float c[1][18] = {2, 2, 5, 2, 1, 0, 1, 4, 9,2, 2, 5, 2, 1, 0, 1, 4, 9};
SavitskyGolaySmoothing((float*)c, 5, 3, 1, 18);
for(int row = 0; row < 1; row++){
for(int col; col < 18; col++){
swtd::cout<输出结果为:
1.74286
3.02857
3.54286
2.85714
0.657143
0.171428
1
5.2
6.17143
3.97143
2.42857
3.54286
2.85714
0.657143
0.171428
1
4.6
7.97143
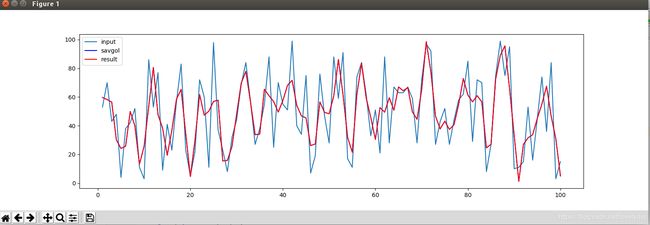
为验证S-G滤波准确性,在python下基于scipy库进行仿真。
import numpy as np
import matplotlib.pyplot as plt
from scipy.signal import savgol_filter
Size = 100
x = np.linspace(1, Size,Size)
data = np.random.randint(1, Size, Size)
plt.plot(x, data)
print(data)
y = savgol_filter(data, 5, 3, mode= 'nearest')
# print(x)
plt.plot(x, y, 'b', label = 'savgol')
arr = []
window_size = 5
order =3
step = int((window_size-1)/2)
for i in range(window_size):
a = []
for j in range(order):
y_val = np.power(-step + i, j)
a.append(y_val)
arr.append(a)
arr = np.mat(arr)
print(arr)
arr = arr * (arr.T * arr).I * arr.T
# print(arr)
# print(step)
a = np.array(arr[step])
a = a.reshape(window_size)
# print(a.shape)
data = np.insert(data, 0, [data[0] for i in range(step)])
data = np.append(data, [data[-1] for i in range(step)])
list = []
for i in range(step, data.shape[0] - step):
arra = []
for j in range(-step, step+1):
arra.append(data[i +j])
b = np.sum(np.array(arra) * a)
# c = arr * (np.mat(arra).reshape(window_size,1))
# for j in range(window_size):
# data[i - step + j] = c[j][0]
# print(c.reshape(window_size))
list.append(b)
# print((list))
plt.plot(x, np.array(list), 'r', label = 'result')
plt.legend()
plt.show()
从仿真结果中可以看出,自己写的滤波函数与Scipy自带的savgol_filter结果一致。
这里有一点不明白:为什么savgol_filter输入order为偶数时,它会自动向上加1,例如oder = 4时,滤波结果与oder = 5一致?如果有知道的大神,请赐教。