《嵌入式-STM32开发指南》第二部分 基础篇 - 第6章 串口通信
6.1串口简介
通用同步异步收发器(USART)提供了一种灵活的方法与使用工业标准NRZ异步串行数据格式的外部设备之间进行全双工数据交换。USART利用分数波特率发生器提供宽范围的波特率选择。它支持同步单向通信和半双工单线通信,也支持LIN(局部互连网),智能卡协议和IrDA(红外数据组织)SIR ENDEC规范,以及调制解调器(CTS/RTS)操作。它还允许多处理器通信。使用多缓冲器配置的DMA方式,可以实现高速数据通信。
接口通过三个引脚与其他设备连接在一起。任何USART双向通信至少需要两个脚:接收数据输入(RX)和发送数据输出(TX)。
RX:接收数据串行输入。通过采样技术来区别数据和噪音,从而恢复数据。
TX :发送数据输出。当发送器被禁止时,输出引脚恢复到它的I/O端口配置。当发送器被激活,并且不发送数据时,TX引脚处于高电平。在单线和智能卡模式里,此I/O 口被同时用于数据的发送和接收。
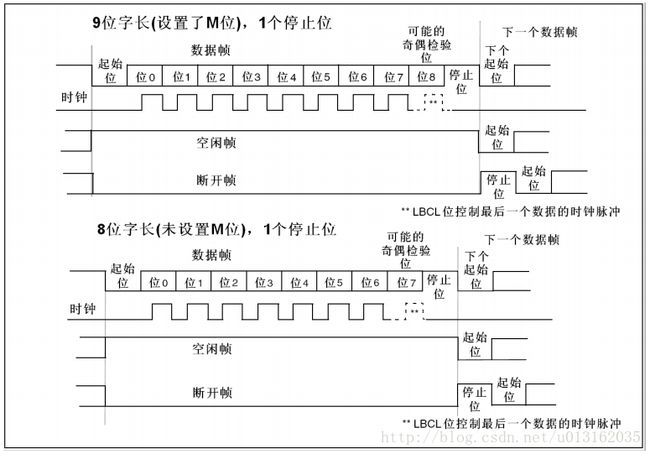
● 总线在发送或接收前应处于空闲状态 ;
● 一个起始位 ;
● 一个数据字(8或9位),最低有效位在前;
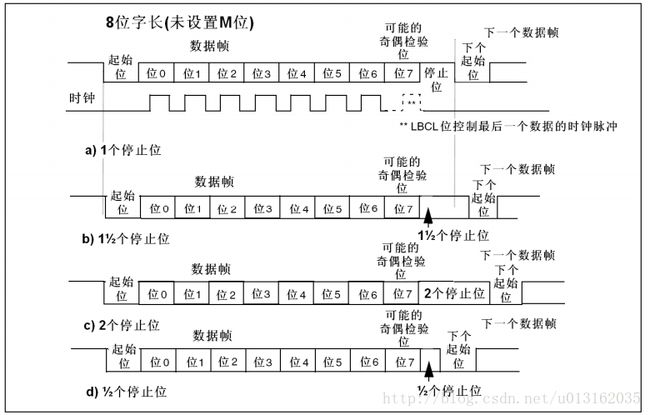
● 1或2个的停止位,由此表明数据帧的结束;
● 使用分数波特率发生器—— 12位整数和4位小数的表示方法。;
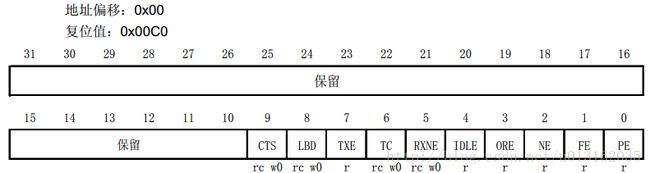
● 一个状态寄存器(USART_SR) ;
● 数据寄存器(USART_DR) ;
● 一个波特率寄存器(USART_BRR),12位的整数和4位小数 ;
● 一个智能卡模式下的保护时间寄存器(USART_GTPR) ;
● IrDA_RDI: IrDA模式下的数据输入;
● IrDA_TDO: IrDA模式下的数据输出;
● nCTS: 清除发送,若是高电平,在当前数据传输结束时阻断下一次的数据发送;
● nRTS: 发送请求,若是低电平,表明USART准备好接收数据。
异步串行通信以字符为单位,即一个字符一个字符地传送 。
串口外设的架构图(见图 2)看起来十分复杂,实际上对于软件开发人员来说,我们只需要大概了解串口发送的过程即可。从下至上,我们看到串口外设主要由三个部分组成,分别是波特率控制、收发控制和数据存储转移。
波特率控制
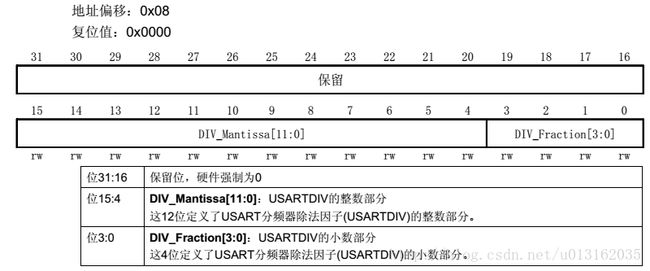
波特率,即每秒传输的二进制位数,用 b/s (bps)表示,通过对时钟的控制可以改变波特率。在配置波特率时,我们向波特比率寄存器 USART_BRR 写入参数,修改了串口时钟 的 分 频值USARTDIV 。 USART_BRR 寄存器包括两部分,分别是 DIV_Mantissa(USARTDIV 的整数部分)和 DIV_Fraction(USARTDIV 的小数)部分,最终,计算公式为 USARTDIV=DIV_Mantissa+(DIV_Fraction/16)。
USARTDIV 是对串口外设的时钟源进行分频的,对于 USART1,由于它挂载在 APB2总线上,所以它的时钟源为 f PCLK2 ;而 USART2、3 挂载在 APB1 上,时钟源则为 fPCLK1,串口的时钟源经过 USARTDIV 分频后分别输出作为发送器时钟及接收器时钟,控制发送和接收的时序。
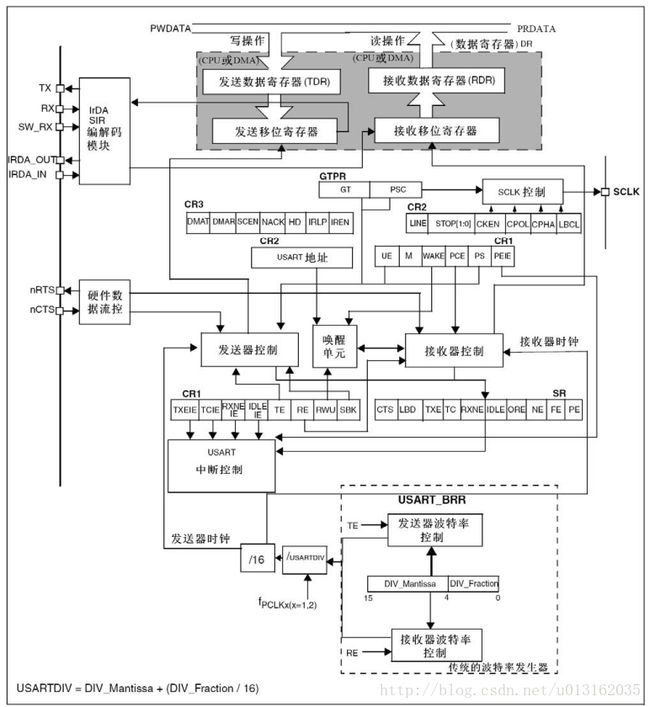
收发控制
围绕着发送器和接收器控制部分,有好多个寄存器 :CR1、CR2、CR3 和 SR,即USART 的三个控制寄存器(Control Register)及一个状态寄存器(Status Register)。通过向寄存器写入 各种控制参数来控制发送和接收,如奇偶校验位、停止位等,还包括对USART 中断的控制 ;串口的状态在任何时候都可以从状态寄存器中查询得到。其中停止位的配置如图3所示。
发送配置步骤:
- 通过在USART_CR1寄存器上置位UE位来激活USART
- 编程USART_CR1的M位来定义字长。
- 在USART_CR2中编程停止位的位数。
- 如果采用多缓冲器通信,配置USART_CR3中的DMA使能位(DMAT)。按多缓冲器通信中的描述配置DMA寄存器。
- 利用USART_BRR寄存器选择要求的波特率。
- 设置USART_CR1中的TE位,发送一个空闲帧作为第一次数据发送。
- 把要发送的数据写进USART_DR寄存器(此动作清除TXE位)。在只有一个缓冲器的情况下,对每个待发送的数据重复步骤7。
- 在USART_DR寄存器中写入最后一个数据字后,要等待TC=1,它表示最后一个数据帧的传输结束。当需要关闭USART或需要进入停机模式之前,需要确认传输结束,避免破坏最后一次传输。
接收配置步骤:
- 将USART_CR1寄存器的UE置1来激活USART。
- 编程USART_CR1的M位定义字长
- 在USART_CR2中编写停止位的个数
- 如果需多缓冲器通信,选择USART_CR3中的DMA使能位(DMAR)。按多缓冲器通信所要求的配置DMA寄存器。
- 利用波特率寄存器USART_BRR选择希望的波特率。
- 设置USART_CR1的RE位。激活接收器,使它开始寻找起始位。
数据存储转移
收发控制器根据我们的寄存器配置,对数据存储转移部分的移位寄存器进行控制。当我们需要发送数据时,内核或 DMA 外设(一种数据传输方式,在后面介绍)把数据从内存(变量)写入到发送数据寄存器 TDR 后,发送控制器将适时地自动把数据从 TDR 加载到发送移位寄存器,然后通过串口线 Tx,把数据一位一位地发送出去,当数据从 TDR转移到移位寄存器时,会产生发送寄存器 TDR 已空事件 TXE,当数据从移位寄存器全部发送出去时,会产生数据发送完成事件 TC,这些事件可以在状态寄存器中查询到。而接收数据则是一个逆过程,数据从串口线 Rx 一位一位地输入到接收移位寄存器,然后自动地转移到接收数据寄存器 RDR,最后用内核指令或 DMA 读取到内存(变量)中。
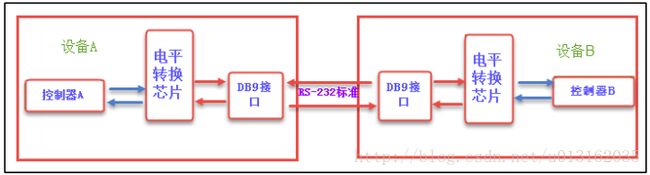
以上对串口通信进行了简单介绍,为了方便各位读者朋友更好的理解,在这里笔者将引入一个新的思想–系统分层思想。既然各位对着有意于嵌入式,那么必须得有对整个系统的架构要有一定的认知。对STM32裸机开发,我们可以将分为三层:物理层、协议层和应用层。前文讲了这么多也是对串口协议进行分析,常用的物理层的串口通信标准有232和485。对于232和485的具体讲解在后文讲解。
6.2串口通信的寄存器描述
串口常用的寄存器有状态寄存器(USART_SR)、数据寄存器(USART_DR)、波特比率寄存器(USART_BRR)、控制寄存器 (USART_CR)。


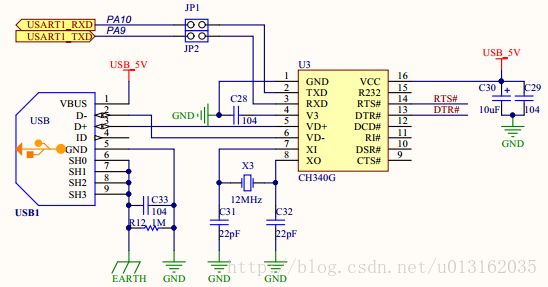
6.3 232通信
设置的一般步骤可以总结为如下几个步骤:
- 串口时钟使能, GPIO 时钟使能;
- 串口复位;
- GPIO 端口模式设置;
- 串口参数初始化;
- 开启中断并且初始化 NVIC;(根据需要配置)
- 使能串口;
- 编写中断处理函数;(根据需要配置)
6.3.1普通方式(printf)
下面笔者就用库函数来配置串口1。
串口1时钟使能。 串口1是挂载在 APB2 下面的外设,所以使能函数为:
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1);
串口复位。 当外设出现异常的时候可以通过复位设置,实现该外设的复位,然后重新配置这个外设达到让其重新工作的目的。一般在系统刚开始配置外设的时候,都会先执行复位该外设的操作。复位的是在函数 USART_DeInit()中完成:
void USART_DeInit(USART_TypeDef* USARTx);//串口复位
比如我们要复位串口 1,方法为:
USART_DeInit(USART1); //复位串口 1
串口参数初始化。 串口初始化是通过 USART_Init()函数实现的,
void USART_Init(USART_TypeDef* USARTx, USART_InitTypeDef* USART_InitStruct);
这个函数的第一个入口参数是指定初始化的串口标号,这里选择 USART1。第二个入口参数是一个 USART_InitTypeDef 类型的结构体指针, 这个结构体指针的成员变量用来设置串口的一些参数。 一般的实现格式为:
USART_InitStructure.USART_BaudRate = 115200; //波特率设置;
USART_InitStructure.USART_WordLength = USART_WordLength_8b;//字长为 8 位数据格式
USART_InitStructure.USART_StopBits = USART_StopBits_1; //一个停止位
USART_InitStructure.USART_Parity = USART_Parity_No; //无奇偶校验位
USART_InitStructure.USART_HardwareFlowControl= USART_HardwareFlowControl_None; //无硬件数据流控制
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx; //收发模式
USART_Init(USART1, &USART_InitStructure); //初始化串口
从上面的初始化格式可以看出初始化需要设置的参数为:波特率,字长,停止位,奇偶校验位,硬件数据流控制,模式(收,发)。 我们可以根据需要设置这些参数。
串口使能。 串口使能是通过函数 USART_Cmd()来实现的,这个很容易理解,使用方法是:
USART_Cmd(USART1, ENABLE); //使能串口
数据发送与接收。 STM32 的发送与接收是通过数据寄存器 USART_DR 来实现的,这是一个双寄存器,包含了 TDR 和 RDR。当向该寄存器写数据的时候,串口就会自动发送,当收到数据的时候,也是存在该寄存器内。
STM32 库函数操作 USART_DR 寄存器发送数据的函数是:
void USART_SendData(USART_TypeDef* USARTx, uint16_t Data);
通过该函数向串口寄存器 USART_DR 写入一个数据。
STM32 库函数操作 USART_DR 寄存器读取串口接收到的数据的函数是:
uint16_t USART_ReceiveData(USART_TypeDef* USARTx);
通过该函数可以读取串口接受到的数据。
串口状态。 串口的状态可以通过状态寄存器 USART_SR 读取。
状态寄存器的其他位我们这里就不做过多讲解,大家需要可以查看中文参考手册。
在我们固件库函数里面,读取串口状态的函数是:
FlagStatus USART_GetFlagStatus(USART_TypeDef* USARTx, uint16_t USART_FLAG);
这个函数的第二个入口参数非常关键, 它是标示我们要查看串口的哪种状态, 比如上面讲解的RXNE(读数据寄存器非空)以及 TC(发送完成)。例如我们要判断读寄存器是否非空(RXNE), 操作库函数的方法是:
USART_GetFlagStatus(USART1, USART_FLAG_RXNE);
我们要判断发送是否完成(TC),操作库函数的方法是:
USART_GetFlagStatus(USART1, USART_FLAG_TC);
这些标识号在 MDK 里面是通过宏定义定义的:
#define USART_IT_PE ((uint16_t)0x0028)
#define USART_IT_TXE ((uint16_t)0x0727)
#define USART_IT_TC ((uint16_t)0x0626)
#define USART_IT_RXNE ((uint16_t)0x0525)
#define USART_IT_IDLE ((uint16_t)0x0424)
#define USART_IT_LBD ((uint16_t)0x0846)
#define USART_IT_CTS ((uint16_t)0x096A)
#define USART_IT_ERR ((uint16_t)0x0060)
#define USART_IT_ORE ((uint16_t)0x0360)
#define USART_IT_NE ((uint16_t)0x0260)
#define USART_IT_FE ((uint16_t)0x0160)
另外,笔者在此给出输出格式的说明,请读者朋友参考。
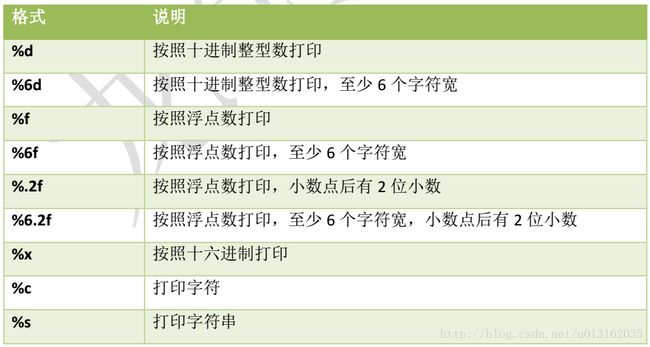
完整代码请查看配套程序,另外还需添加微库以便支持printf。具体设置参看本节后文的小贴士部分。
6.3.2中断方式
中断方式相对于与普通方式,还需要开启中断并且初始化 NVIC以及中断服务函数。
开启中断
在接收到数据的时候( RXNE 读数据寄存器非空),我们要产生中断,那么我们开启中断的方法是:
USART_ITConfig(USART1, USART_IT_RXNE, ENABLE); /* 使能串口1接收中断 */
在发送数据结束的时候( TC, 发送完成) 要产生中断,那么方法是:
USART_ITConfig(USART1, USART_IT_TC, ENABLE);
初始化NVIC
NVIC_InitTypeDef NVIC_InitStructure;
/* Configure the NVIC Preemption Priority Bits */
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_0);
/* Enable the USARTy Interrupt */
NVIC_InitStructure.NVIC_IRQChannel = USART1_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);
中断服务函数
void USART1_IRQHandler(void)
{
uint8_t ch;
if(USART_GetITStatus(USART1, USART_IT_RXNE) != RESET)
{
//ch = USART1->DR;
ch = USART_ReceiveData(USART1);
printf( "%c", ch ); //将接受到的数据直接返回打印
}
}
本章参考代码
IAR版本完整代码
KEIL版本完整代码