拓扑排序和关键路径
拓扑排序:
每次选择前驱节点为0的节点,然后删除以其为顶点的边,重复上述操作,直到删除所有节点为止或者所有节点都有前驱.若还有剩余节点,那么图存在环.
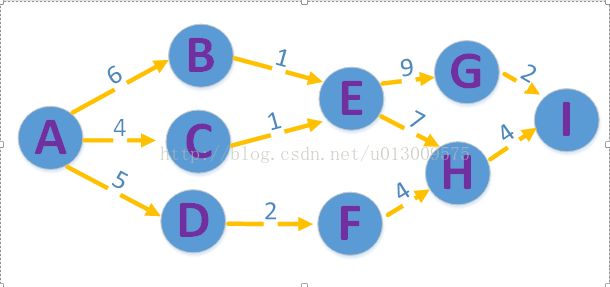
关键路径(图中最长的路径):
活动:图中的弧.
事件:图中的顶点.
由于活动时间长短可能不同,导致事件发生的时间可以不同,从v1到vi的最长路径长度是节点i的最早发生时间,不推迟整个工程完成的情况下,事件vi的最迟开始时间.
1.根据拓扑序,更新所有节点的最早发生时间,使其最大.
2.令终点的最迟开始时间等于最早发生时间.
3.根据逆拓扑序,更新所有节点的最迟开始时间,使其最小.
4.如果一个节点的最迟开始时间等于最早发生时间,那么该事件为关键事件,如果一条弧两端的节点都是关键事件,那么该弧为关键活动.这样就可以查找到所有关键活动了.
(1)为什么要根据拓扑序来扩展节点?
因为当拓扑序扩展到某一个节点时候,该节点已经没有前驱了.所以可以到达该节点的路径都已经计算过了,即该节点所记录的路径值为v0到达vi的最大值.
(2)为什么要根据逆拓扑序来计算最迟开始时间?
如果一个图可以进行拓扑排序,那么把该图中所有路径首尾倒置,即箭头方向调转,该图也一定可以进行拓扑排序,且和倒转前的图的拓扑排序恰好相反.这样,我们可以把逆拓扑序看作路径倒转后的拓扑序.这样根据上面的拓扑序扩展原理,此处我们使用逆拓扑序可以令扩展出来的节点的最迟开始时间最小
#include
#include
#include
#include
usingnamespace std;
#defineVexNum 9
#defineVEXMAX 100000
typedefchar VextexType;
typedefint EdgeType;
structEdgeNode;
structEdgeNode {
VextexType HeadName;
VextexType TailName;
EdgeType weight;
EdgeNode *VexOut;
EdgeNode *VexIn;
};
structvexTopological {
char name;
int preVexNum;
int early;
int last;
bool isUsed;
}vextopo[VexNum];
structvexWeight{
char name;
int pathWeight;
char path[VexNum+1];
};
typedefstruct
{
VextexType name;
EdgeNode *VexOutlink;
EdgeNode *VexInlink;
}VexNode;
VexNodeadjList[VexNum];
voidcreatGraph()
{
VextexType vextemp;
EdgeType edgetemp;
//char a[]={'A','B','C','D','E'};
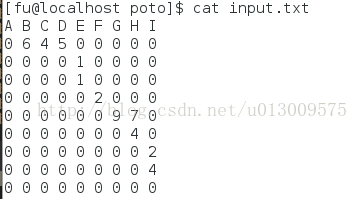
char a[]={'A', 'B', 'C', 'D', 'E', 'F','G', 'H', 'I'};
int b[] = {
0, 6, 4, 5, 0, 0, 0, 0, 0,
0, 0, 0, 0, 1, 0, 0, 0, 0,
0, 0, 0, 0, 1, 0, 0, 0, 0,
0, 0, 0, 0, 0, 2, 0, 0, 0,
0, 0, 0, 0, 0, 0, 9, 7, 0,
0, 0, 0, 0, 0, 0, 0, 4, 0,
0, 0, 0, 0, 0 ,0 ,0, 0, 2,
0, 0, 0, 0 ,0 ,0, 0, 0, 4,
0, 0, 0, 0, 0, 0, 0, 0, 0};
//input n vextex
for ( int i=0; i>vextemp;
//vextemp = a[i];
adjList[i].name = vextemp;
adjList[i].VexOutlink = NULL;
adjList[i].VexInlink = NULL;
}
for ( int i=0; i>edgetemp;
//edgetemp = b[i];
if ( edgetemp==0 ){
continue;
}
EdgeNode *pEdge = new EdgeNode;
pEdge->HeadName =adjList[i/VexNum].name;
pEdge->TailName =adjList[i%VexNum].name;
pEdge->weight = edgetemp;
pEdge->VexOut = adjList[i/VexNum].VexOutlink;
if ( pEdge->VexOut ){
while ( pEdge->VexOut->VexOut){
pEdge->VexOut=pEdge->VexOut->VexOut;
}
pEdge->VexOut->VexOut =pEdge;
pEdge->VexOut=NULL;
} else {
adjList[i/VexNum].VexOutlink =pEdge;
pEdge->VexOut = NULL;
}
}
for ( int i=0 ;iTailName !=adjList[i].name ){
p = p->VexOut;
continue;
}
*pInLink = p;
pInLink = &p->VexIn;
p = p->VexOut;
}
}
*pInLink = NULL;
}
}
voiddestroyGrape()
{
for ( int i=0; iVexOut;
delete q;
}
}
}
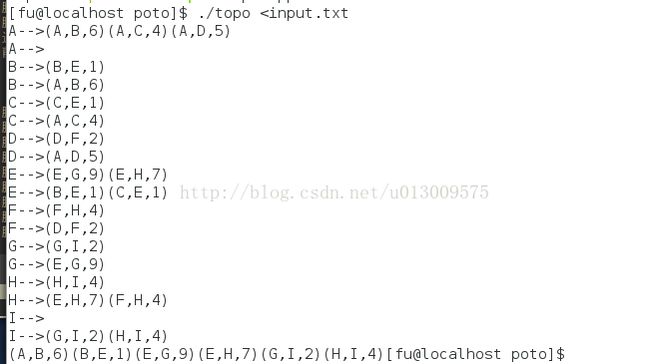
voidprintGrape()
{
for ( int i=0; i";
EdgeNode *p = adjList[i].VexOutlink;
while ( p ){
cout<<"("<HeadName<<","<TailName<<","<weight<<")";
p = p->VexOut;
}
cout<";
while ( p ){
cout<<"("<HeadName<<","<TailName<<","<weight<<")";
p = p->VexIn;
}
cout< s;
deque sPrint;
for ( int i=0; iVexIn;
vextopoNum++;
}
vextopo[i].preVexNum = vextopoNum;
}
//按拓扑顺序压入栈中.
for ( int i=0; iTailName-'A';
if ( vextopo[nextNum].early <(vextopo[i].early + pNext->weight) ){
vextopo[nextNum].early =vextopo[i].early + pNext->weight;
}
vextopo[nextNum].preVexNum--;
pNext = pNext->VexOut;
}
}
ptopo = s.top();
s.pop();
ptopo->last = ptopo->early;
s.push(ptopo);
while ( !s.empty() ){
int vexPos;
int preVexPos;
ptopo = s.top();
s.pop();
vexPos = ptopo->name-'A';
pPre = adjList[vexPos].VexInlink;
while ( pPre ){
preVexPos = pPre->HeadName-'A';
if ( vextopo[preVexPos].last >ptopo->last - pPre->weight ){
vextopo[preVexPos].last = ptopo->last - pPre->weight;
}
pPre = pPre->VexIn;
}
}
while ( !sPrint.empty() ){
vexTopological * p = sPrint.front();
sPrint.pop_front();
if ( p->early != p->last ){
continue;
}
int vexPos = p->name - 'A';
EdgeNode * pedge =adjList[vexPos].VexOutlink;
while ( pedge ){
if (vextopo[pedge->TailName-'A'].last == vextopo[pedge->TailName-'A'].early){
cout<<"("<HeadName<<","<TailName<<","<weight<<")";
}
pedge = pedge->VexOut;
}
}
}
int main()
{
creatGraph();
printGrape();
topologicRank();
destroyGrape();
} 
测试数据: