Linux input按键设备驱动
本文基于mini2440开发板,Linux版本号是:linux-2.6.32.2
一. input模块的注册
input模块被当成了一个字符设备,注册到内核中。
#define INPUT_MAJOR 13
static int __init input_init(void)
{
int err;
err = register_chrdev(INPUT_MAJOR, "input", &input_fops);
if (err) {
printk(KERN_ERR "input: unable to register char major %d", INPUT_MAJOR);
goto fail2;
}
return 0;
}
可以看到,调用register_chrdev函数来注册input设备,input设备的主设备号是13.
2. open函数与input模块如何关联
当我们在应用中要操作input模块时,我们通常会open input设备,然后就可以对input设备进行读写操作,那么这之间的过程是什么呢。
- input模块的fops
static const struct file_operations input_fops = {
.owner = THIS_MODULE,
.open = input_open_file,
};
-
input模块的fops注册过程
—>register_chrdev
—>__register_chrdev(major, 0, 256, name, fops)主设备号是major,次设备号是0

可以看到,在__register_chrdev函数中,申请了一个cdev的结构体,然后将input模块的fops赋值给了cdev结构体,然后将cdev结构体添加进入内核。看一下cdev_add函数。
cdev_add
—>kobj_map(cdev_map, dev, count, NULL, exact_match, exact_lock, p)cdev_map是一个kobj_map * 全局变量,指向分配的struct kobj_map大小的内存。


在kobj_map函数中,临时分配了一个probe类型的p指针,将cdev结构体当成私有数据赋值给p,然后将p插入到kobj_map指向的数组中,总之cdev结构体保存在了kobj_map指向的数组中。 -
字符设备的open操作
在用户空间open一个字符设备简单的流程如下:
open
—>sys_open
—>chrdev_open分析一下chrdev_open函数
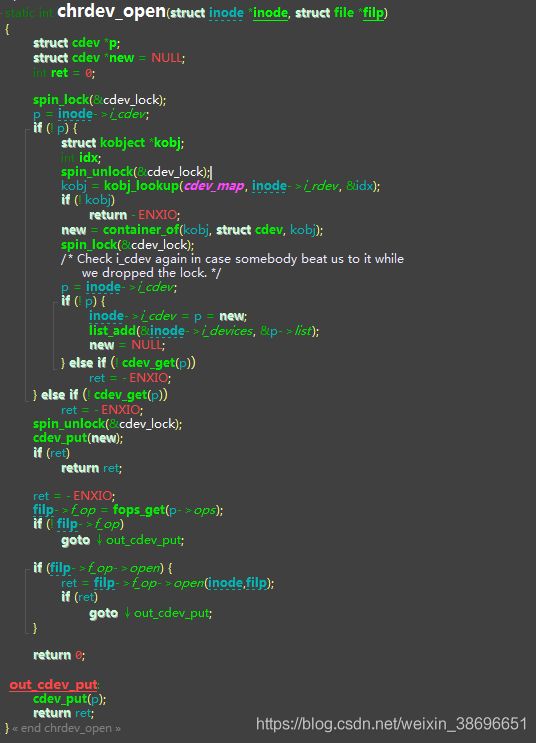
由上图可以,chrdev_open处理的事情是:
①判断inode->i_cdev是否存在,如果不存在,根据inode的设备号在cdev_map中找到对应的 cdev,就是上面的new,并将cdev赋值给inode->i_cdev。
②若inode->i_cdev已经存在,就不用再找了。
③获取inode->i_cdev的fops,并将它赋值给filp的f_op。
④filp->f_op->open函数。
实际上,根据设备号cdev设备就是之前注册的input设备,input设备的fops如下:
static const struct file_operations input_fops = {
.owner = THIS_MODULE,
.open = input_open_file,
};
至此,应用层调用open函数已经关联到了对驱动设备的open操作。
3.input模块的open操作

从上图可知,open函数主要做了一下操作:
- 从input_table变量中获取一个handler。
- 获取handler的fops函数,也保存file自己的fops。
- 调用handler的fops的open函数,出错了再调用file的fops的open函数。
此处好奇input_table是怎么来的。通过搜索,发现是在input_register_handler函数中注册的。
4.input模块handler的注册
在evdev.c这个文件里面调用了函数input_register_handler注册了一个handler。
static struct input_handler evdev_handler = {
.event = evdev_event,
.connect = evdev_connect,
.disconnect = evdev_disconnect,
.fops = &evdev_fops,
.minor = EVDEV_MINOR_BASE,
.name = "evdev",
.id_table = evdev_ids,
};
static int __init evdev_init(void)
{
return input_register_handler(&evdev_handler);
}
minor = 64.
进入input_register_handler函数里面看一下。
int input_register_handler(struct input_handler *handler)
{
struct input_dev *dev;
int retval;
retval = mutex_lock_interruptible(&input_mutex);
if (retval)
return retval;
INIT_LIST_HEAD(&handler->h_list);
if (handler->fops != NULL) {
if (input_table[handler->minor >> 5]) {
retval = -EBUSY;
goto out;
}
input_table[handler->minor >> 5] = handler;
}
list_add_tail(&handler->node, &input_handler_list);
list_for_each_entry(dev, &input_dev_list, node)
input_attach_handler(dev, handler);
input_wakeup_procfs_readers();
out:
mutex_unlock(&input_mutex);
return retval;
}
上面的函数做的操作有:
①将注册的handler保存在input_table这个全局数组中,具体保存在input_table[64>>5] = input_table[2];
②将handler添加到input_handler_list链表的尾部。
③遍历input_dev_list链表,取出里面的每一个input_dev,尝试将dev和这个handler绑定。
④绑定的过程就是调用handler的connect函数。
5.input模块handler和input dev绑定
绑定过程调用的是handler的connect函数,最终在evdev.c里面调用的是evdev_connect函数。
①分配一个struct evdev结构体。
②evdev里面有一个handle结构体,将input dev赋值给handle的dev,将handler赋值给handle的handler。
evdev->handle.dev = input_get_device(dev);
evdev->handle.name = dev_name(&evdev->dev);
evdev->handle.handler = handler;
③注册这个handle
input_register_handle(&evdev->handle);
④将handle添加到dev的h_list链表
list_add_tail_rcu(&handle->d_node, &dev->h_list);
⑤将handle添加到handler的h_list链表
list_add_tail(&handle->h_node, &handler->h_list);
⑥调用handler的start函数。
handler->start(handle);
⑦添加dev设备,设备名称是event0, event1
dev_set_name(&evdev->dev, "event%d", minor);
device_add(&evdev->dev);
6.input_dev的注册
int input_register_device(struct input_dev *dev)
{
static atomic_t input_no = ATOMIC_INIT(0);
struct input_handler *handler;
const char *path;
int error;
__set_bit(EV_SYN, dev->evbit);
/*
* If delay and period are pre-set by the driver, then autorepeating
* is handled by the driver itself and we don't do it in input.c.
*/
init_timer(&dev->timer);
if (!dev->rep[REP_DELAY] && !dev->rep[REP_PERIOD]) {
dev->timer.data = (long) dev;
dev->timer.function = input_repeat_key;
dev->rep[REP_DELAY] = 250;
dev->rep[REP_PERIOD] = 33;
}
if (!dev->getkeycode)
dev->getkeycode = input_default_getkeycode;
if (!dev->setkeycode)
dev->setkeycode = input_default_setkeycode;
dev_set_name(&dev->dev, "input%ld",
(unsigned long) atomic_inc_return(&input_no) - 1);
error = device_add(&dev->dev);
if (error)
return error;
path = kobject_get_path(&dev->dev.kobj, GFP_KERNEL);
printk(KERN_INFO "input: %s as %s\n",
dev->name ? dev->name : "Unspecified device", path ? path : "N/A");
kfree(path);
error = mutex_lock_interruptible(&input_mutex);
if (error) {
device_del(&dev->dev);
return error;
}
list_add_tail(&dev->node, &input_dev_list);
list_for_each_entry(handler, &input_handler_list, node)
input_attach_handler(dev, handler);
input_wakeup_procfs_readers();
mutex_unlock(&input_mutex);
return 0;
}
在input_register_device函数中主要做了一下操作:
①调用device_add(&dev->dev)函数添加input设备
②将dev设备添加到input_dev_list链表内
list_add_tail(&dev->node, &input_dev_list);
③从input_handler_list这个链表中取出每一项handler,对该handler和dev进行绑定
list_for_each_entry(handler, &input_handler_list, node)
input_attach_handler(dev, handler);
④handler和dev的绑定过程上面有讲述。
7. input模块dev和handler的数据关系
8. input按键消息的采集
-
注册一个gpio-keys的driver驱动
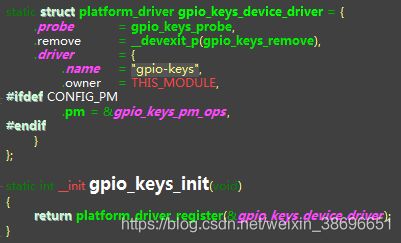
-
当有gpio-keys的device注册时,自动调用driver驱动的probe函数。
-
分析该驱动的probe函数。
①申请分配一个input_dev结构体
input = input_allocate_device();
②填充input结构体的一些信息
input->name = pdev->name;
input->phys = "gpio-keys/input0";
input->dev.parent = &pdev->dev;
input->id.bustype = BUS_HOST;
input->id.vendor = 0x0001;
input->id.product = 0x0001;
input->id.version = 0x0100;
③对每一个button对应的IO口进行申请,设置IO口方向
error = gpio_request(button->gpio, button->desc ?: "gpio_keys");
error = gpio_direction_input(button->gpio);
④对每一个button对应的IO口申请中断
irq = gpio_to_irq(button->gpio);
error = request_irq(irq, gpio_keys_isr,
IRQF_SHARED |
IRQF_TRIGGER_RISING | IRQF_TRIGGER_FALLING,
button->desc ? button->desc : "gpio_keys",
bdata);
⑤对每一个button数据结构设置一个工作队列
INIT_WORK(&bdata->work, gpio_keys_report_event);
⑥对每一个button设置一个定时器防抖
setup_timer(&bdata->timer, gpio_keys_timer, (unsigned long)bdata);
⑦注册这个input dev
error = input_register_device(input);
⑧有按键触发,进入中断,中断没有做什么操作,直接进入了工作队列,工作队列的处理函数是gpio_keys_report_event
schedule_work(&bdata->work);
⑨工作队列的处理函数中检测gpio口电平变化,调用input_event上抛按键消息。
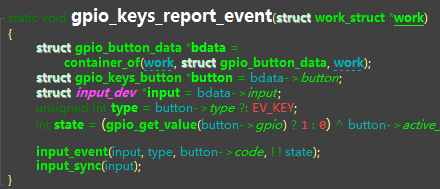
9.input按键消息的上抛
①调用input_event函数上抛按键消息
input_event(input, type, button->code, !!state);
type是按键的类型,code是按键的键值,state是按键的状态,按下,抬起还是长按。
②调用input_handle_event函数继续上抛按键消息
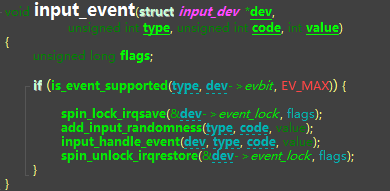
③进入input_handle_event函数,消息类型是EV_KEY,调用input_pass_event函数继续上抛消息
disposition = INPUT_PASS_TO_HANDLERS;
if (disposition & INPUT_PASS_TO_HANDLERS)
input_pass_event(dev, type, code, value);
④从dev->h_list中取出每一个handle,调用handle的handler的event函数。
list_for_each_entry_rcu(handle, &dev->h_list, d_node)
if (handle->open)
handle->handler->event(handle, type, code, value);
⑤handle的handler对应的event处理函数为evdev_event
⑥evdev_event函数中,根据handle找到对应的evdev
struct evdev *evdev = handle->private;
⑦遍历evdev->client_list,调用evdev_pass_event函数,把按键消息发给每一个client
list_for_each_entry_rcu(client, &evdev->client_list, node)
evdev_pass_event(client, &event);
⑧evdev_pass_event函数中实际上是把按键消息保存在client的环形buffer中。
static void evdev_pass_event(struct evdev_client *client,
struct input_event *event)
{
/*
* Interrupts are disabled, just acquire the lock
*/
spin_lock(&client->buffer_lock);
client->buffer[client->head++] = *event;
client->head &= EVDEV_BUFFER_SIZE - 1;
spin_unlock(&client->buffer_lock);
kill_fasync(&client->fasync, SIGIO, POLL_IN);
}
⑨唤醒等待队列,有消息到来。
wake_up_interruptible(&evdev->wait);
至此按键消息已经保存到了client->buffer中,buffer大小为64。
10.上面的client是什么,是怎么来的
在上面的描述中,input模块的open操作,最终调用了handler->fops的open函数。最终调用的是evdev_open函数。

看一下evdev_open函数里面的操作。
①申请一个client结构体
client = kzalloc(sizeof(struct evdev_client), GFP_KERNEL);
②将client结构体添加到evdev->client_list的链表中。
evdev_attach_client(evdev, client);
③将client和file绑定
file->private_data = client;
11. 按键消息的读取
调用evdev_fops函数的read函数,最终是调用的evdev_read函数。
evdev_read函数中做了如下操作:
①判断按键消息buffer是否为空,若是空的,不阻塞的读取操作直接返回。
if (client->head == client->tail && evdev->exist && (file->f_flags & O_NONBLOCK))
return -EAGAIN;
②等待按键消息队列被唤醒
retval = wait_event_interruptible(evdev->wait, client->head != client->tail || !evdev->exist);
③获取消息,并把消息拷贝给应用层
while (retval + input_event_size() <= count &&
evdev_fetch_next_event(client, &event))
{
if (input_event_to_user(buffer + retval, &event))
return -EFAULT;
retval += input_event_size();
}
④evdev_fetch_next_event获取按键消息,其实就是将client->buffer中的数据赋值给event
static int evdev_fetch_next_event(struct evdev_client *client,
struct input_event *event)
{
int have_event;
spin_lock_irq(&client->buffer_lock);
have_event = client->head != client->tail;
if (have_event) {
*event = client->buffer[client->tail++];
client->tail &= EVDEV_BUFFER_SIZE - 1;
}
spin_unlock_irq(&client->buffer_lock);
return have_event;
}
至此,已经把消息拷贝给了应用层。