玩转四旋翼无人机(攒机基础2)
电机
航模电机分无刷电机和有刷电机两种。无刷电机与有刷电机相比,缺少了交替变换电磁场的换向电刷,在运转时摩擦力减小,噪音降低,运转时不产生电火花,在目前的无人机市场上已成为主导,本章我们将介绍主要无刷电机。 无刷电机通过电子调速器(俗称电调)将输入的直流电变成三相交流电,利用三相交流电产生的旋转磁场驱动转子转动。电调通过从遥控器接收机接收控制信号,控制电机的转速,完成无人机的俯仰、横滚等动作。

上图展示了无刷电机的工作原理。
电机KV值
电机的重要参数是KV值,它指电机每增加1V电压,电机空转的转速每分钟增加的次数,我们可以用一个公式来表示:电机的转速(空载)=KV值*电压 例如,KV1000的电机,在10V电压下,它的转速(空载)就是 10000转/分钟。 KV值高代表马达的内阻小,电流大,转速快,相同电压下爆发出来的功率高,拥有很好的极限转速,反之亦然。但受到电机的设计与材料限制,电机会有一个功率上限。 电机的KV值越大所产生的扭力就越小,KV值越低产生的扭力越大,所以KV值决定配什么样的桨。通常KV值高的电机配小的高速桨,KV值低的电机配大的低速桨,依实际情况而定。
比如KV值2100的电机,在11.1V的电压下,转速(空转)2100*11.1=23310转每分钟,此时它可能刚好适合用5030桨,如果你硬给它配8060桨,电机可能也转得动,但电机和电调可能会烧掉。因为在这种情况下要带动8060桨,需要更大的扭力,而转速越快,提供的扭力就小。并非KV值2100的电机在任何情况下都适合带5030桨,如果电压高了,转速就更高了,扭力会减小,就需要换小桨。反之,如果在电压7.4V的情况下,就可以用稍大点的桨。
电机效率值
电机效率的标注方式是:G/W(克/每瓦) ,但电机的功率和拉力并不是成正比的,比如飓风3508KV380电机在111W的时候拉力可能是1010G,但244W时可能只有1570G。
大多数电机在3A~5A的电流下效率是最高的。正常飞行中效率通常保持在8G/1W以上,以保证续航能力。 以3508电机为例,假定参数显示的最大拉力为1890克,那么以它为电机的四旋翼理论的最大拉力就是7560克,但在实际飞行中,这样的电机组合肯定带不动7560克的机身。因为四轴的升力除了把自身抬起来之外,还要用一部分力来前进后退,左右横滚。除此之外还要考虑最关键的抗风。 建议是保留60%左右的升力来做这些飞行动作和抗风,避免因电池电压降低后因升力不足而炸鸡。仍以3508电机为例,其四个最大拉力是7560克,整机重量不超过最大拉力的40%,即3024克。保留的拉力值太少,会导致电机高负荷运行,既降低效率,又增加电机自身震动,影响飞控自稳,大风一起容易侧飘或炸机。
电调
无刷电机与有刷电机相比取消了碳刷结构,所以无刷电机需要一个能替代碳刷功能的部件,它就是电调。
电调的全称是电子调速器(electronic speed controller ,简称ESC),电调对应使用的电机类型不同,分为无刷电调和有刷电调。有刷电机转动时可以不用电调,但如果没有电调就无法控制电机的转速。而无刷电机必须要有电调,否则不能转动。
电调的功能
电调可以将输入的直流电转换为三相交流电以供电机使用,并根据飞控发出的控制信号控制电机的电压及电流大小,从而驱动电机实现需要的转速输出。电调具有电压变化器的作用,它通过转换电池电压以供接收机和飞控板工作。电机运转时的电流很大,当电机正常工作时,如果没有电调的存在,飞控板根本无法承受这样大的电流。
电调的连接
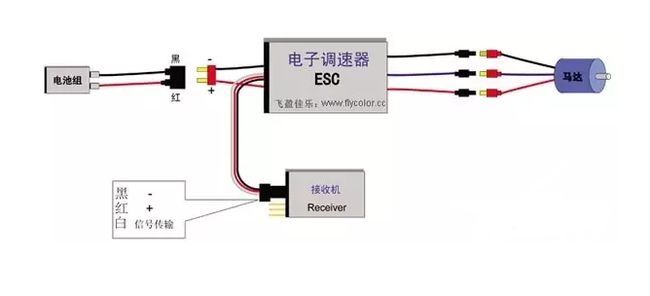
无刷电调的连接如下图所示:输入线与电池连接,信号线输入线与接收机连接,三根信号输出线(有刷两根)与电机连接。
电调一般有电源输出功能,即在信号线的正负极之间,有5V左右的电压输出,通过信号线为接收机供电,接收机再为舵机等控制设备供电。电调的参数A电调最常见的参数A指电调可稳定调整输出的电流量。例如30A的电调最大可稳定输出30A的电流,如果超标准使用,会导致电调烧毁。很多模友问:既然电调有最大电流的限制,那么选个大电流的电调就是不是就可以一劳永逸。其实不然,电调的大小与输出的电流成正比,电调的调整输出电流值越大,电调的重量也越大,这等于增加了无人机额外的重量。对于初学者而言,组装小四轴时使用20A~30A的电调基本就够用了。
BEC和UBEC的区别
BEC的全称是Battey Elimination Circuit,中文翻译成免电池电路。早期的航模接收机和舵机需要一个5V或6V的单独电池供电,模友们想到在电调里内置一个电路模块,将12V电池输出的电压转换到5V6V给接收机和舵机使用,以便把2个电源并成1个电源(电机还是用12V供电的),这就是BEC(免电池电路)的由来。
BEC大多采用线性稳压方式,它的优点是线路简单、体积小,只要一个稳压管就可以;但缺点是转换效率不高,稳压的时候能量损耗大(线性稳压效率一般只有65%70%),所以在工作过程中稳压管会很烫(电调发烫的主要热量就来自这个稳压管,真正控制电机的MOS开关管其实发热量不大的)。由于其效率不高,输出电流最大也就1A左右。
由于线性稳压的固有缺点,内置的BEC无法满足新的电流要求,模友们又想到把内置的BEC搬出来,单独做个体积更大输出电流更强的稳压模块,以满足大功率舵机的需求,它就是UBEC(Ultra Battery Elimination Circuit)。稳压模块独立后,体积限制已不成问题,索性就不采用低效率的线性稳压了,改用开关电源的方式来稳压。开关电源的优点是转换效率高(做得好的甚至能达到98%),稳压过程损耗小,发热降低。开关电源虽然有诸多优点,但元件过多使它体积偏大,并产生较强的电磁干扰,一般UBEC的说明书上都会建议将UBEC放置得离接收机越远越好。有模友反映,UBEC除了产生较强的电磁辐射外,其电源输出也并不十分纯净,有电源波纹存在,这样对PPM的遥控方式影响就很大,所以建议还是用PCM遥控方式比较好。(PPM与PCM的区别在遥控器篇会有介绍)
电调的编程
电调有很多功能模式,电调的编程可以直接将电调连接至遥控接收机的油门输出通道(通常是3通道),按说明书的介绍在遥控器上通过搬动摇杆进行设置。通过遥控器设置电调,一定要接上电机,因为说明书上说的“滴滴”类的声音,是通过电机发出来的。另外还可以通过厂家的编程卡来进行设置(需要单独购买),这个方法简单,无需接遥控器。
电调有快速响应和慢速响应的区别,四轴无人机需要快速响应的电调,可以通过编程来设置响应速度。为了保险起见,一定要将购买的电调设置一致,否则容易造成电调的启动模式不一致,使电机有的转得快,有的转得慢。
电池和电调的搭配
电池和电调进行搭配时需要注意几个原则:
一是电池的电压一定不能超过电调的最高承载电压。
二是电池的电流持续输出应大于电调的最大持续电流输出。例如以2200mAh/20C电池为例,它的电流输出是2200*20/1000=44A,如果电调小于44A,则配合起来没问题。
三是电机工作电压由电调决定,而电调电压由电池输出决定,所以电池的电压要等于或小于电机的最大电压。
四是电调最大电压不能超过电机能承受的最大电压。
电机和电调的搭配
在确定了适合所选定的无人机的电机后,需要依据选用的电机确定它的最大电流,然后挑选电调和电池。电调的输出电流必须大于电机的最大电流,电池输出电流一样要大于电机的最大电流,越大越好。例如,电机带螺旋桨的最大负载电流是20A,就必须选取输出20A以上电流的电调,越大越保险。
电池的选取和电调一样,它的输出电流是越大越好。电池的放电电流达不到电调的电流时电调就发挥不了最高性能,而且电池会发热,产生爆炸,所以一般情况都需要电池的电流大于电调的电流。
refer
- http://www.exuav.com/forum.php?mod=viewthread&tid=664&extra=page%3D1%26filter%3Dtypeid%26typeid%3D41
- http://www.exuav.com/forum.php?mod=viewthread&tid=650&extra=page%3D1%26filter%3Dtypeid%26typeid%3D41
- https://en.wikipedia.org/wiki/Brushless_DC_electric_motor