Output
对于每组数据,请在一行里输出最短需要行走的距离。如果不存在从S到T的路线,就输出-1.
Sample Input
3 3
0 1 1
0 2 3
1 2 1
0 2
3 1
0 1 1
1 2
Sample Output
2
-1
题目链接:http://acm.hdu.edu.cn/showproblem.php?pid=1874
先用Bellman-Ford算法做一遍。
简单说一下什么是Bellman-Ford算法,因为图中最长的边只能是V-1的长度(不考虑带负圈的图),从顶点s到顶点t,不会经过同一个顶点2次。那么就进行V-1次循环,每次循环都遍历所有的边,更新边的端点的距离(距顶点s的距离)。
解释一些变量的含义:
edge:存放边的结构体,顶点from到顶点to的权值cost。
G[]:存放边的数组。
注意一点:Bellman-Ford里边数是按照有向边的数目遍历,这题是无向图,所以边数乘以2,得到一个{from,to,cost}的边,额外再加一个{to,from,cost}这样的边。使用邻接表时,无向图都要考虑这点,后面的Dijkstra邻接表版也是要考虑的,无向图的一条边等于2条边。
#include
#include
#include
#include
using namespace std;
#define N 205
#define M 2005
#define inf 0x3f3f3f3f
struct edge{
int from,to,cost;
}G[M];
int dis[N];
void Bellman_Ford(int start,int n,int m)
{
int update=0;
memset(dis,0x3f,sizeof(dis));
dis[start]=0;
for(int i=0;idis[G[j].from]+G[j].cost)
{
dis[G[j].to]=dis[G[j].from]+G[j].cost;
}
}
}
}
int main()
{
int n,m,start,end;
while(~scanf("%d%d",&n,&m)){
for(int i=0;i<2*m;)
{
cin>>G[i].from>>G[i].to>>G[i].cost;
G[i+1].from=G[i].to;
G[i+1].to=G[i].from;
G[i+1].cost=G[i].cost;
i+=2;
}
cin>>start>>end;
Bellman_Ford(start,n,m);
printf("%d\n",dis[end]==inf?-1:dis[end]);
}
return 0;
}
普通版Dijkstra算法(邻接矩阵)
解释一下变量的含义:
roads[i][j]:邻接矩阵,表示顶点i和顶点j的距离(顶点编号,这题是从0开始)。
dis[i]:起始点start到顶点i的最短距离
vis[i]:标记数组,vis[i]=1,表示顶点i被访问过了,已经算过起始点start到顶点i的最短路了。
注意:if(cost
#include
#include
#include//strlen memset头文件
#include//max函数头文件
#include//ceil()函数
using namespace std;
#define N 205
#define inf 0x3f3f3f3f
int roads[N][N],dis[N],vis[N];
void Dijkstra(int n,int start)
{
int Min,pos;
memset(vis,0,sizeof(vis));
for(int i=0;i>from>>to>>cost;
if(cost>start>>end;
Dijkstra(n,start);
printf("%d\n",dis[end]==inf?-1:dis[end]);
}
return 0;
}
还有一个模板,这两个模板我都很喜欢,也记录下来:
#include
#include
#include//strlen memset头文件
#include//max函数头文件
#include//ceil()函数
using namespace std;
#define N 205
#define inf 0x3f3f3f3f
int roads[N][N],dis[N],vis[N];
void Dijkstra(int n,int start)
{
int Min,pos;
memset(vis,0,sizeof(vis));
for(int i=0;idis[pos]+roads[pos][j])
{
dis[j]=dis[pos]+roads[pos][j];
}
}
}
}
int main()
{
int n,m,from,to,cost,start,end;
while(~scanf("%d%d",&n,&m)){
memset(roads,63,sizeof(roads));
for(int i=0;i>from>>to>>cost;
if(cost>start>>end;
Dijkstra(n,start);
printf("%d\n",dis[end]==inf?-1:dis[end]);
}
return 0;
}
还是dijkstra算法,使用邻接矩阵的复杂度是 不过这次用的是邻接表。使用邻接表的表话,更新最短距离只需要访问每条边即可,因此这部分的复杂度是
不过这次用的是邻接表。使用邻接表的表话,更新最短距离只需要访问每条边即可,因此这部分的复杂度是 。但是每次都要枚举所有的顶点来查找下一个使用的顶点,因此最终复杂度还是,所以需要合适的数据结构来优化。
。但是每次都要枚举所有的顶点来查找下一个使用的顶点,因此最终复杂度还是,所以需要合适的数据结构来优化。
需要优化的是数值的插入和取出,使用堆可以实现。每个顶点当前的最短距离用堆维护,在更新最短距离时,把对应元素往根的方向移动,这样每次从堆中取出的最小值就是下次要使用的顶点。这样堆中元素共有V,每次取是E次,这样整个算法的复杂度就是 ,这个还是优化了不少的。
,这个还是优化了不少的。
那个continue操作如下如:

先从节点1出发,dis[2]=1,dis[3]=3
然后从节点2出发,dis[3]=2了,下次遍历节点3时,第一次记录的信息没用了,就跳过了(第一次dis[3]=3)
解释一些变量的含义:
edge:记录边的结构体,有向图中to代表弧头对应的顶点,无向图就是无所谓了,cost就是边的权值了。
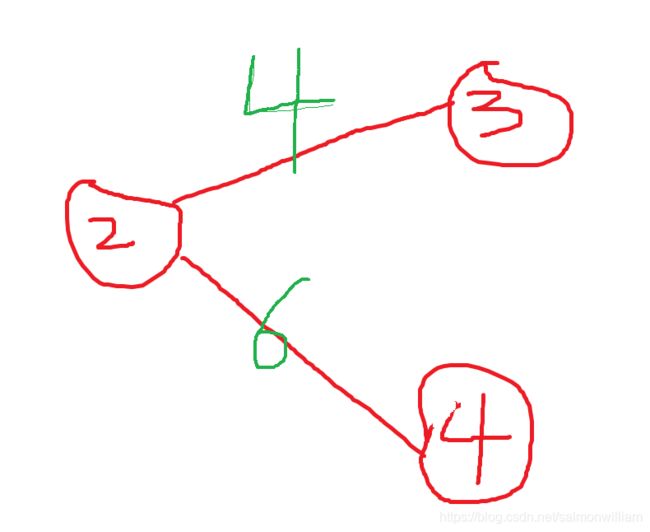
G[N]:是个vector的数组,G的每个元素,比如G[2]对应的就是一个edge类型的vector。画个图吧,比如G[2]=[{3,4},{4,6}],就是这么个意思。
注意:
edge e={to,cost};
G[from].push_back(e);
e={from,cost};
G[to].push_back(e);
这个一定要有,因为是无向图,所以是双向的。
#include
#include
#include
#include//strlen memset头文件
#include//max函数头文件
#include//ceil()函数
#include
using namespace std;
#define inf 0x3f3f3f3f
#define N 205
struct edge{
int to,cost;
};
typedef pair P;
// vector G[N];
int dis[N];
void Dijkstra(vector G[],int n,int start)
{
priority_queue,greater > que;
for(int i=0;idis[v]+e.cost)
{
dis[e.to]=dis[v]+e.cost;
que.push(P(dis[e.to],e.to));
}
}
}
}
int main()
{
int n,m,from,to,cost,start,end;
while(~scanf("%d%d",&n,&m))
{
vector G[N];
for(int i=0;i>from>>to>>cost;
edge e={to,cost};
G[from].push_back(e);
e={from,cost};
G[to].push_back(e);
}
cin>>start>>end;
Dijkstra(G,n,start);
printf("%d\n",dis[end]==inf?-1:dis[end]);
}
return 0;
}
还有一种算法,虽然复杂度较高O(n3),但它值得拥有一个名字,在这题是可以AC的。
Floyd_Warshall算法
思路:其实就是个数学的排列组合问题,顶点i到顶点j的最短路经过的节点,无非就是顶点编号从0到n-1这n个节点取不取的问题,所以计算roads[i][j]的最短路时,我就把每个节点都检查一遍,要不要在我的最短路径中出现。
该算法和Bellman-Ford算法一样,可以处理边是负数的情况。而判断图中是否有负圈,只需检查是否存在d[i][i]是负数就可以了。
k的顺序从0-n-1和从n-1到0进行遍历都是可以的。
#include
#include
#include//strlen memset头文件
#include//max函数头文件
#include//ceil()函数
using namespace std;
#define N 205
#define inf 0x3f3f3f3f
int roads[N][N],dis[N],vis[N];
void Floyd_Warshall(int n)
{
for(int k=0;kroads[i][k]+roads[k][j])
{
roads[i][j]=roads[i][k]+roads[k][j];
}
}
}
}
}
int main()
{
int n,m,from,to,cost,start,end;
while(~scanf("%d%d",&n,&m)){
memset(roads,63,sizeof(roads));
for(int i=0;i>from>>to>>cost;
if(cost>start>>end;
Floyd_Warshall(n);
printf("%d\n",roads[start][end]!=inf?roads[start][end]:-1);
}
return 0;
}
关于Dijkstra为什么不能计算负边,看图

因为前提是:节点v被访问过,即意味着已经找到了从源点到这个点v的最短路径,但若存在负权边,与这个前提矛盾。上图中,d[B]=2,就意味着2就是最短距离,之后不会再更新了,所以结果就不对了。
但是Bellman-Ford算法和Floyd-Warshall算法可以处理负边,而且也可以判断是否存在负圈。