STM32F10xxx内置两个看门狗,提供了更高的安全性、时间的精确性和使用的灵活性。两个看门狗设备(独立看门狗和窗口看门狗)可用来检测和解决由软件错误引起的故障。
独立看门狗(IWDG)由专用的低速时钟(LSI)驱动,即使主时钟发生故障它也仍然有效。IWDG最适合应用于那些需要看门狗作为一个在主程序之外,能够完全独立工作,并且对时间精度要求较低的场合。
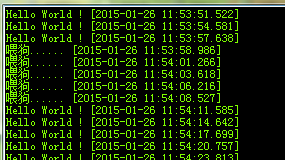
我们的实验这样设计,主函数开始的时候,向串口输出“Hello World”,然后启动看门口(溢出时间设定为3秒钟)。在按下按键的时候喂狗,同时串口打印“喂狗”。
预期结果:如果不按按键,则约每三秒重启一次,现象是串口隔三秒就会打印“Hello World”;如果在启动后的3秒内按键,则显示“喂狗”,再在3秒内按键……这样保证不重启。
看一下代码吧。
独立看门狗的初始化:
void IWDG_Init(u8 prer,u16 rlr)
{
IWDG_WriteAccessCmd(IWDG_WriteAccess_Enable); //使能对寄存器 IWDG_PR 和 IWDG_RLR的写操作
IWDG_SetPrescaler(prer); //设置预分频值
IWDG_SetReload(rlr); //设置重装载值
IWDG_ReloadCounter(); //按照重装载值装载IWDG计数器
IWDG_Enable(); //看门狗使能
}
PRER 就是表格中的PR[2:0],取值范围是0-7;
RLR就是表格中的RL[11:0],取值范围是0x000-0xFFF;
注意:这里的时间是粗略计算的,不是那么准确。
溢出时间 = 2^PR*(RL+1)/10
单位:ms
如果我们定时3秒钟,那么应该是:
IWDG_Init(4,1874); // 2^4 * (1874+1) / 10 (ms)= 16*1875/10 (ms)= 3000(ms) = 3s
主函数代码:
int main(void)
{
delay_init(); //延时函数初始化
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);
uart_init(9600); //串口初始化
printf("Hello World ! \r\n");
IWDG_Init(4,1874); // 看门狗初始化并使能
key_init(); //按键IO初始化
EXTIX_Init(); // 按键中断初始化
while(1)
{
;
}
}喂狗的操作是:
void IWDG_Feed(void)
{
IWDG_ReloadCounter();//reload
}
我们在按键中断处理中喂狗:
void EXTI0_IRQHandler(void)
{
delay_ms(10); //消除抖动
if(KEY3==1) //WK_UP
{
printf("喂狗......\r\n");
IWDG_Feed();
}
EXTI_ClearITPendingBit(EXTI_Line0); //清除中断标志位
}实验结果如图。
如果不喂狗,那么大约3秒钟就会重启。

如果喂狗,效果如下。