控制工程基础学习笔记-第3章 时域瞬态响应分析
Überblick
- 第3章 时域瞬态响应分析
- 3.1 时域响应及典型输入信号
- 3.2 一阶系统的瞬态响应
- 3.2.1 一阶系统的单位阶跃响应
- 3.2.2 一阶系统的单位斜坡响应
- 3.2.3 一阶系统的单位脉冲响应
- 3.3 二阶系统的瞬态响应
- 3.3.1 二阶系统的单位阶跃响应
- 3.3.1.1 欠阻尼 0 < ζ < 1 0<\zeta<1 0<ζ<1
- 3.3.1.2 临界阻尼 ζ = 1 \zeta=1 ζ=1
- 3.3.1.3 过阻尼 ζ > 1 \zeta>1 ζ>1
- 3.3.1.4 零阻尼 ζ = 0 \zeta=0 ζ=0
- 3.3.1.4 负阻尼 ζ < 0 \zeta<0 ζ<0
- 3.3.2 二阶系统的单位脉冲响应
- 3.3.2.1 欠阻尼 0 < ζ < 1 0<\zeta<1 0<ζ<1
- 3.3.2.2 临界阻尼 ζ = 1 \zeta =1 ζ=1
- 3.3.2.3 过阻尼 ζ > 1 \zeta>1 ζ>1
- 3.3.3 二阶系统的单位斜坡响应
- 3.4 时域分析性能指标
- 3.4.1 时域分析性能指标的介绍
- 3.4.2 时域性能指标的求取
第3章 时域瞬态响应分析
3.1 时域响应及典型输入信号
稳态响应:系统在时间上趋于无穷大时的输出状态。
瞬态响应:输入信号作用下,输出量从初始状态到稳定状态的响应过程。
典型的输入信号有阶跃信号,斜坡信号,加速度信号,脉冲信号以及正弦信号,这些在第二章都已经提到过了,这里就不过多赘述了。
值得一提的是,由于单位脉冲函数拉式变换后它的象函数等于1,因此当系统输入为单位脉冲脉冲函数时,系统的脉冲响应函数等于系统的传递函数。
当系统输入任一时间函数时,我们可以利用脉冲函数这一良好的性质,把输入信号分割为n个脉冲。然后把输出函数通过这种方法再叠加起来就好了。
按比例和时间平移的方法,可得 τ k \tau_k τk时刻的响应为 x ( τ k ) g ( t − τ k ) Δ τ x(\tau_k)g(t-\tau_k)\Delta\tau x(τk)g(t−τk)Δτ
所以
y ( t ) = lim n → ∞ ∑ k = 0 n x ( τ k ) g ( t − τ k ) Δ τ = ∫ 0 t x ( τ ) g ( t − τ ) d τ \begin{aligned} y(t)&=\lim\limits_{n\to \infty}\sum^n_{k=0}x(\tau_k)g(t-\tau_k)\Delta\tau \\&=\int^t_0x(\tau)g(t-\tau)\mathrm{d}\tau \end{aligned} y(t)=n→∞limk=0∑nx(τk)g(t−τk)Δτ=∫0tx(τ)g(t−τ)dτ
也就是说,输出响应为输入函数与脉冲函数的卷积,脉冲响应函数由此又得名权函数。这一结论其实也可以通过拉式变换的卷积定理来印证。
3.2 一阶系统的瞬态响应
能够用一阶微分方程描述的系统。它的典型形式是一阶惯性环节。
X o ( s ) X i ( s ) = 1 T s + 1 {X_o(s)\over X_i(s)}={1\over Ts+1} Xi(s)Xo(s)=Ts+11
3.2.1 一阶系统的单位阶跃响应
单位阶跃输入为 x i ( t ) = 1 ( t ) x_i(t)=1(t) xi(t)=1(t)。象函数为 X i ( s ) = 1 s X_i(s)={1\over s} Xi(s)=s1。则:
X o ( s ) = 1 T s + 1 ⋅ 1 s = 1 s − T T s + 1 = 1 s − 1 s + 1 T X_o(s)={1\over Ts+1}\cdot {1\over s}={1\over s}-{T\over Ts+1}={1\over s}-{1\over s+{1\over T}} Xo(s)=Ts+11⋅s1=s1−Ts+1T=s1−s+T11
经过拉式反变换:
x o ( t ) = ( 1 − e − 1 T t ) 1 ( t ) x_o(t)=\left(1-\mathrm{e}^{-{1\over T}t}\right)1(t) xo(t)=(1−e−T1t)1(t)
值得记住的特点只有一条,一阶系统的单位阶跃响应的调整时间为 ( 3 − 4 ) T (3-4)T (3−4)T。
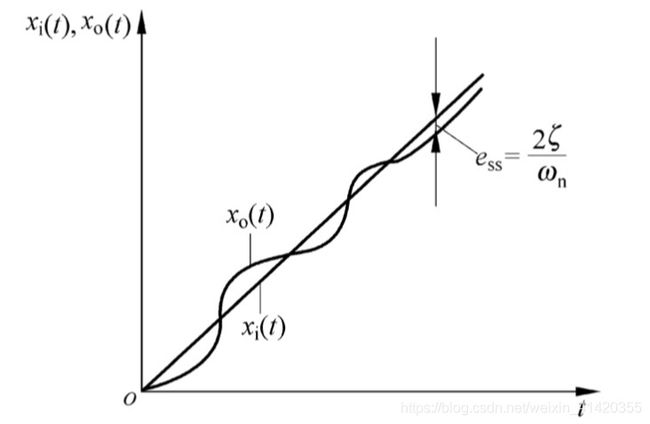
3.2.2 一阶系统的单位斜坡响应
单位斜坡输入为 x i ( t ) = t ⋅ 1 ( t ) x_i(t)=t\cdot 1(t) xi(t)=t⋅1(t)。它的象函数为 X i ( s ) = 1 s 2 X_i(s)={1\over s^2} Xi(s)=s21。由此得:
X o ( s ) = 1 T s + 1 ⋅ 1 s 2 = 1 s 2 − T s + T s + 1 T X_o(s)={1\over Ts+1}\cdot {1\over s^2}={1\over s^2}-{T\over s}+{T\over s+{1\over T}} Xo(s)=Ts+11⋅s21=s21−sT+s+T1T
经过拉式反变换后:
x o ( t ) = ( t − T + T e − 1 T t ) 1 ( t ) x_o(t)=(t-T+T\mathrm{e}^{-{1\over T}t})1(t) xo(t)=(t−T+Te−T1t)1(t)
对输入和输出做差可以得到误差函数 e ( t ) = x i ( t ) − x o ( t ) = T − T e − t / T e(t)=x_i(t)-x_o(t)=T-T\mathrm{e}^{-t/T} e(t)=xi(t)−xo(t)=T−Te−t/T
3.2.3 一阶系统的单位脉冲响应
单位脉冲输入 x i ( t ) = δ ( t ) x_i(t)=\delta (t) xi(t)=δ(t)。象函数为 X i ( s ) = 1 X_i(s)=1 Xi(s)=1。
经过简单的计算可以的得到:
x o ( t ) = ( 1 T e − 1 T t ) 1 ( t ) x_o(t)=\left({1\over T}\mathrm{e}^{-{1\over T}t}\right)1(t) xo(t)=(T1e−T1t)1(t)
一阶系统的瞬态响应小结
| 输入函数 | 响应函数 |
|---|---|
| 单位斜坡: x i ( t ) = t ⋅ 1 ( t ) x_i(t)=t\cdot 1(t) xi(t)=t⋅1(t) | x o t ( t ) = ( t − T + T e − 1 T t ) 1 ( t ) x_{ot}(t)=(t-T+T\mathrm{e}^{-{1\over T}t})1(t) xot(t)=(t−T+Te−T1t)1(t) |
| 单位阶跃: x i ( t ) = 1 ( t ) x_i(t)=1(t) xi(t)=1(t) | x o 1 ( t ) = ( 1 − e − 1 T t ) 1 ( t ) x_{o1}(t)=\left(1-\mathrm{e}^{-{1\over T}t}\right)1(t) xo1(t)=(1−e−T1t)1(t) |
| 单位脉冲: x i ( t ) = δ ( t ) x_i(t)=\delta (t) xi(t)=δ(t) | x o δ ( t ) = ( 1 T e − 1 T t ) 1 ( t ) x_{o\delta}(t)=\left({1\over T}\mathrm{e}^{-{1\over T}t}\right)1(t) xoδ(t)=(T1e−T1t)1(t) |
我们分析一下输入和输出的关系不难得出如下的结论。对于线性定常系统:输入微分(或积分)的输出等于原输出的微分(或积分)。
我们可以简单地说明一下理由。设一个系统的传递函数为 G ( s ) G(s) G(s),对于 x i ( t ) x_i(t) xi(t)的响应为 x o ( t ) x_o(t) xo(t)。也就是说 x o ( t ) = L − 1 [ X o ( s ) ] = L − 1 [ G ( s ) X i ( s ) ] x_o(t)=L^{-1}[X_o(s)]=L^{-1}[G(s)X_i(s)] xo(t)=L−1[Xo(s)]=L−1[G(s)Xi(s)]。而如果输入为 x ˙ i ( t ) \dot x_i(t) x˙i(t),则 输 出 = L − 1 [ G ( s ) s X i ( s ) ] = L − 1 [ s G ( s ) X i ( s ) ] = L − 1 [ s X o ( s ) ] = x ˙ o ( t ) 输出=L^{-1}[G(s)sX_i(s)]=L^{-1}[sG(s)X_i(s)]=L^{-1}[sX_o(s)]=\dot x_o(t) 输出=L−1[G(s)sXi(s)]=L−1[sG(s)Xi(s)]=L−1[sXo(s)]=x˙o(t)。
3.3 二阶系统的瞬态响应
我们通常有两种形式来描述二阶系统:
形式一:
X o ( s ) X i ( s ) = ω n 2 s 2 + 2 ζ ω n s + ω n 2 {X_o(s)\over X_i(s)}={\omega_n^2\over s^2+2\zeta\omega_ns+\omega_n^2} Xi(s)Xo(s)=s2+2ζωns+ωn2ωn2
形式二:
X o ( s ) X i ( s ) = 1 T 2 s 2 + 2 ζ T s + 1 {X_o(s)\over X_i(s)}={1\over T^2s^2+2\zeta Ts+1} Xi(s)Xo(s)=T2s2+2ζTs+11
其中 T = 1 / ω n T=1/\omega_n T=1/ωn
3.3.1 二阶系统的单位阶跃响应
响应的象函数为:
X o ( s ) = ω n 2 s 2 + 2 ζ ω n s + ω n 2 ⋅ 1 s X_o(s)={\omega_n^2\over s^2+2\zeta\omega_n s+\omega_n^2}\cdot {1\over s} Xo(s)=s2+2ζωns+ωn2ωn2⋅s1
下面我们要根据二阶系统的极点分布特点,分五种情况进行讨论。
下面开始顺便一起复习机械振动。如果想要按照机械振动的语境来研究这个问题,可以看我这一篇博客
3.3.1.1 欠阻尼 0 < ζ < 1 0<\zeta<1 0<ζ<1
我们对传递函数进行变形:
X o ( s ) X i ( s ) = ω n 2 ( s + ζ ω n + j ω d ) ( s + ζ ω n − j ω d ) {X_o(s)\over X_i(s)}={\omega_n^2\over (s+\zeta\omega_n+\mathrm{j}\omega_d)(s+\zeta\omega_n-\mathrm{j}\omega_d)} Xi(s)Xo(s)=(s+ζωn+jωd)(s+ζωn−jωd)ωn2
式中, ω d = ω n 1 − ζ 2 \omega_d=\omega_n \sqrt{1-\zeta^2} ωd=ωn1−ζ2,我们称 ω d \omega_d ωd为阻尼自振角频率。
把单位阶跃输入代入其中得到:(我这么和你说吧,这一波计算,我算了半个小时,所以建议下面的结论还是记住比较好)
X o ( s ) = 1 s − s + ζ ω n ( s + ζ ω n ) 2 + ω d 2 − ζ ω n ( s + ζ ω n ) 2 + ω d 2 X_o(s)={1\over s}-{s+\zeta\omega_n\over(s+\zeta\omega_n)^2+\omega_d^2}-{\zeta\omega_n\over(s+\zeta\omega_n)^2+\omega_d^2} Xo(s)=s1−(s+ζωn)2+ωd2s+ζωn−(s+ζωn)2+ωd2ζωn
经过拉式反变换得到:
x o ( t ) = ( 1 − e − ζ ω n t c o s ( ω d t ) − ζ 1 − ζ 2 e − ζ ω n t s i n ( ω d t ) ) 1 ( t ) x_o(t)=\left(1-\mathrm{e}^{-\zeta\omega_n t}\mathrm{cos}(\omega_dt)-{\zeta \over \sqrt{1-\zeta^2}}\mathrm{e}^{-\zeta\omega_n t}\mathrm{sin}(\omega_d t)\right)1(t) xo(t)=(1−e−ζωntcos(ωdt)−1−ζ2ζe−ζωntsin(ωdt))1(t)
不建议直接记忆拉式反变换的结论,可以记忆一下这个式子:
X o ( s ) = 1 s − s + 2 ζ ω n ( s + ζ ω n ) 2 + ω d 2 X_o(s)={1\over s}-{s+2\zeta\omega_n\over(s+\zeta\omega_n)^2+\omega_d^2} Xo(s)=s1−(s+ζωn)2+ωd2s+2ζωn
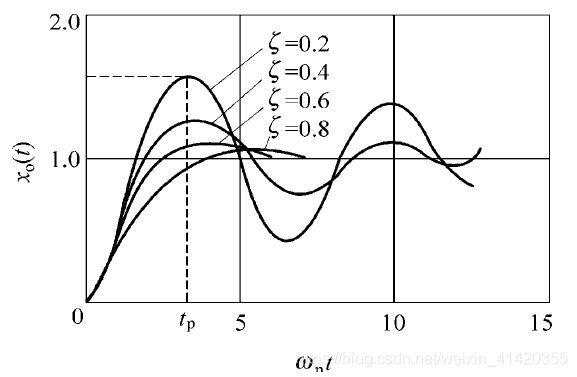
对于欠阻尼系统有如下特点:
- 以 ω d \omega_d ωd为角频率衰减振荡;
- 随着 ζ \zeta ζ的减小,振荡幅度加大。
画在一张图上如下所示:
3.3.1.2 临界阻尼 ζ = 1 \zeta=1 ζ=1
运用刚才我们需要记住的式子进行变形:
X o ( s ) = 1 s − s + 2 ζ ω n ( s + ζ ω n ) 2 + ω d 2 X_o(s)={1\over s}-{s+2\zeta\omega_n\over(s+\zeta\omega_n)^2+\omega_d^2} Xo(s)=s1−(s+ζωn)2+ωd2s+2ζωn
代入 ζ = 1 \zeta=1 ζ=1得到 ω d = 0 \omega_d=0 ωd=0,进一步得到:
X o ( s ) = 1 s − s + 2 ω n ( s + ω n ) 2 = 1 s − s + ω n ( s + ω n ) 2 − ω n ( s + ω n ) 2 = 1 s − 1 ( s + ω n ) − ω n ( s + ω n ) 2 \begin{aligned} X_o(s)&={1\over s}-{s+2\omega_n\over(s+\omega_n)^2} \\&={1\over s}-{s+\omega_n\over(s+\omega_n)^2}-{\omega_n\over(s+\omega_n)^2} \\&={1\over s}-{1\over(s+\omega_n)}-{\omega_n\over(s+\omega_n)^2} \end{aligned} Xo(s)=s1−(s+ωn)2s+2ωn=s1−(s+ωn)2s+ωn−(s+ωn)2ωn=s1−(s+ωn)1−(s+ωn)2ωn
对之进行拉式反变换:
可以得到结论:
x o ( t ) = ( 1 − e − ω n t − ω n t e − ω n t ) 1 ( t ) x_o(t)=(1-\mathrm{e}^{-\omega_n t}-\omega_n t\mathrm{e}^{-\omega_n t})1(t) xo(t)=(1−e−ωnt−ωnte−ωnt)1(t)
3.3.1.3 过阻尼 ζ > 1 \zeta>1 ζ>1
式子特别长,但是我觉得考试不会考这种情况,过阻尼好像大家一般都不太研究它。
记住它没有超调,过渡时间长就好了。超调是什么马上就来解释。
3.3.1.4 零阻尼 ζ = 0 \zeta=0 ζ=0
同样利用我们之前记住的式子:
X o ( s ) = 1 s − s + 2 ζ ω n ( s + ζ ω n ) 2 + ω d 2 X_o(s)={1\over s}-{s+2\zeta\omega_n\over(s+\zeta\omega_n)^2+\omega_d^2} Xo(s)=s1−(s+ζωn)2+ωd2s+2ζωn
代入 ζ = 0 \zeta=0 ζ=0,可得 ω d = ω n \omega_d=\omega_n ωd=ωn,由此可得:
X o ( s ) = 1 s − s s 2 + ω n 2 X_o(s)={1\over s}-{s\over s^2+\omega_n^2} Xo(s)=s1−s2+ωn2s
经过拉式反变换可得:
x o ( t ) = ( 1 − c o s ( ω n t ) ) 1 ( t ) x_o(t)=(1-\mathrm{cos}(\omega_n t))1(t) xo(t)=(1−cos(ωnt))1(t)
零阻尼情况下,输入信号后维持等幅振荡。
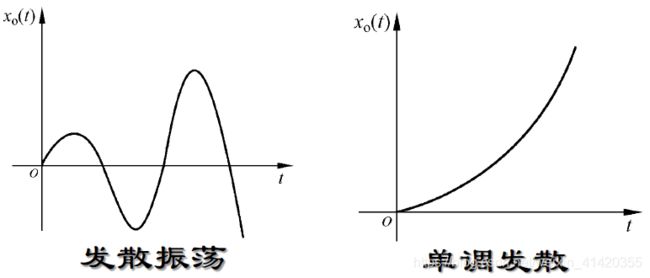
3.3.1.4 负阻尼 ζ < 0 \zeta<0 ζ<0
系统是发散不稳定的,一般机械系统不会遇到这种情况。
可能存在两种情况:
3.3.2 二阶系统的单位脉冲响应
单位脉冲响应输入的原函数为 x i ( t ) = δ ( t ) x_i(t)=\delta(t) xi(t)=δ(t)象函数为 X i ( s ) = 1 X_i(s)=1 Xi(s)=1。由此可以得到 X o ( s ) = ω n 2 s 2 + 2 ζ ω n s + ω n 2 ⋅ 1 X_o(s)={\omega_n^2\over s^2+2\zeta\omega_n s+\omega_n^2}\cdot 1 Xo(s)=s2+2ζωns+ωn2ωn2⋅1。我们分三种情况来讨论这个问题。
3.3.2.1 欠阻尼 0 < ζ < 1 0<\zeta<1 0<ζ<1
我们将原来的式子进行变形可以得到:
X o ( s ) = ω n 2 ( s + ζ ω n + j ω d ) ( s + ζ ω n − j ω d ) = ω n 1 − ζ 2 ω d ( s + ζ ω n ) 2 + ω d 2 X_o(s)={\omega_n^2\over (s+\zeta\omega_n+\mathrm{j}\omega_d)(s+\zeta\omega_n-\mathrm{j}\omega_d)}={{\omega_n \over \sqrt{1-\zeta^2}}\omega_d\over (s+\zeta\omega_n)^2+\omega_d^2} Xo(s)=(s+ζωn+jωd)(s+ζωn−jωd)ωn2=(s+ζωn)2+ωd21−ζ2ωnωd
上面这步变形并没有用到第二章提到的那些方法,就是简单的把分母配成完全平方,把分子的 ω n 2 \omega_n^2 ωn2变形成一个 ω n \omega_n ωn乘以一个 ω d \omega_d ωd和一个系数的形式。这样一来我们就可以简单地进行一个拉氏变换,得到:
x o ( t ) = ( ω n 1 − ζ 2 e − ζ ω n t s i n ( ω d t ) ) 1 ( t ) x_o(t)=\left({\omega_n\over\sqrt{1-\zeta^2}}\mathrm{e}^{-\zeta\omega_nt}\mathrm{sin}(\omega_d t)\right)1(t) xo(t)=(1−ζ2ωne−ζωntsin(ωdt))1(t)
响应的图像和阶跃响应类似,但是有所不同:

特点和阶跃响应类似。
3.3.2.2 临界阻尼 ζ = 1 \zeta =1 ζ=1
响应的象函数为:
X o ( s ) = ω n 2 ( s + ω n ) 2 X_o(s)={\omega_n^2\over (s+\omega_n)^2} Xo(s)=(s+ωn)2ωn2
那么利用衰减定理和斜坡函数的拉氏变换我们可以得到这个象函数的原函数为:
x o ( t ) = ( ω n 2 t e − ω n t ) 1 ( t ) x_o(t)=(\omega_n^2 t\mathrm{e}^{-\omega_nt})1(t) xo(t)=(ωn2te−ωnt)1(t)
3.3.2.3 过阻尼 ζ > 1 \zeta>1 ζ>1
式子特别长,打了也记不住。下面把三种情况下的响应图像汇总到一张图上看一下:

3.3.3 二阶系统的单位斜坡响应
单位斜坡函数的象函数为 1 s 2 1\over s^2 s21。这个系统的响应为:
X o ( s ) = ω n 2 s 2 + 2 ζ ω n s + ω n 2 ⋅ 1 s 2 X_o(s)={\omega_n^2\over s^2+2\zeta\omega_n s+\omega_n^2}\cdot {1\over s^2} Xo(s)=s2+2ζωns+ωn2ωn2⋅s21
这里上课的时候老师好像也没有讨论它响应的数学表达式。想想也是,一对重极点,一对共轭极点,zu kompliziert。
我们就看看图吧:
欠阻尼:
临界阻尼:

过阻尼:

3.3这一部分基本上和机械振动的内容的重合度非常高可以对比着开展学习。
3.4 时域分析性能指标
据说老师考研面试的时候问过控制系统性能的三大特性,值得注意一下。
控制系统的性能指标主要可以从时域、频域和误差积分三个方面来进行分析。时域性能的指标是最为直观的一个。
时域分析性能指标是以系统对单位阶跃输入的瞬态响应给出的。下面我们来讨论一下这六大参数:
3.4.1 时域分析性能指标的介绍
(1)上升时间 t τ t_\tau tτ:响应曲线从零时刻首次到达稳态值的时间。对于没有超调的系统,就是从稳态值的10%上升到稳态值的90%所需的时间。
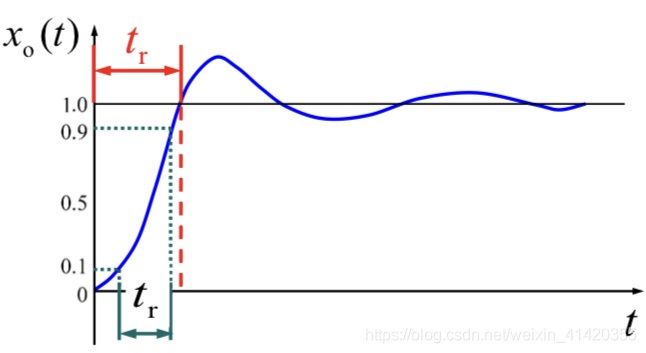
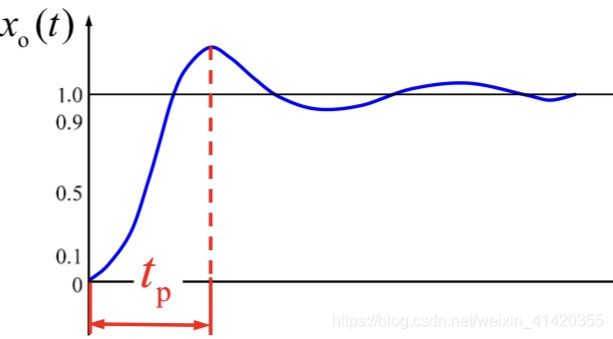
(2) 峰值时间 t p t_p tp:响应曲线从零时刻上升到第一个峰值点所需要的时间;适用于有超调的系统。
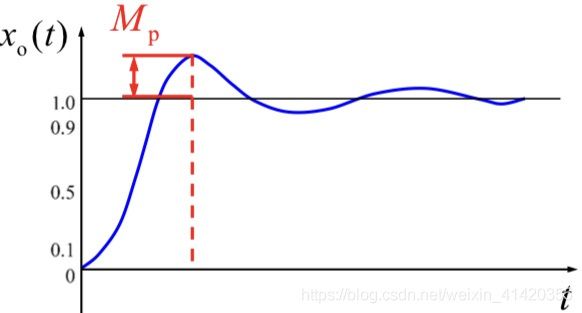
(3)最大超调量 M p M_p Mp:响应曲线的最大峰值与稳态值的差与稳态值之比。对于单位阶跃直接是作差就好了。
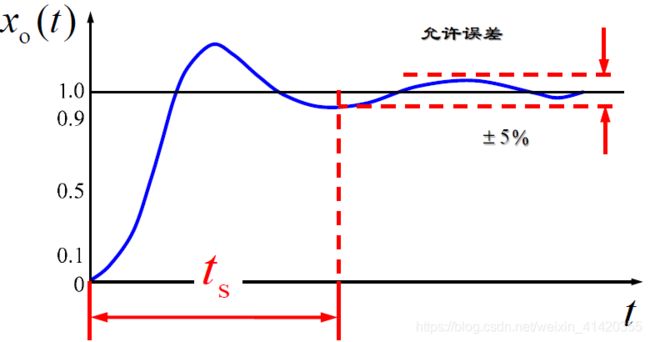
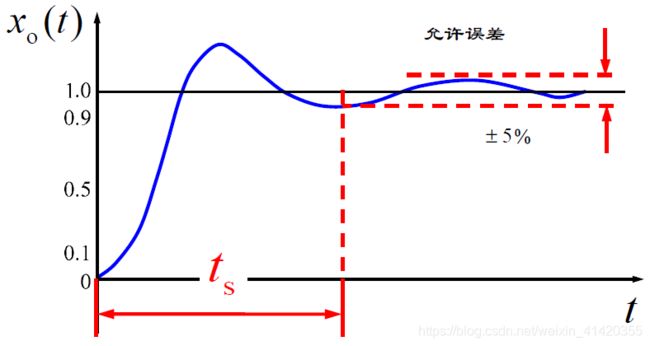
(4)调整时间 t s t_s ts:响应曲线达到并保持在允许误差范围内的最短时间。
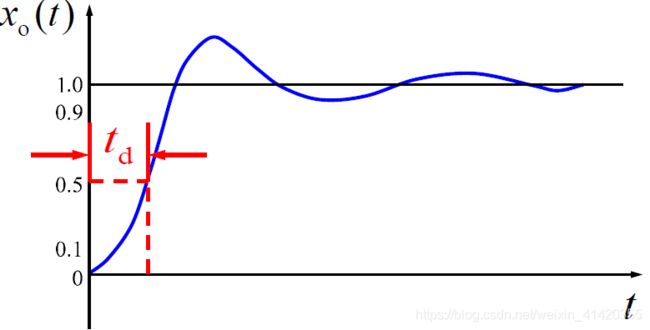
(5)延迟时间 t d t_d td:响应曲线从零上升到稳态值的50%所需要的时间。
(6)振荡次数:在调整时间 t s t_s ts内响应曲线振荡的次数。
3.4.2 时域性能指标的求取
下面着重讨论一下二阶欠阻尼系统的时域性能指标的求解。
首先,二阶欠阻尼系统的阶跃响应的函数为:
x o ( t ) = ( 1 − 1 1 − ζ 2 e − ζ ω n t s i n ( ω d t + a r c t a n 1 − ζ 2 ζ ) ) 1 ( t ) x_o(t)=\left(1-{1 \over \sqrt{1-\zeta^2}}\mathrm{e}^{-\zeta\omega_n t}\mathrm{sin}(\omega_d t+\mathrm{arctan}{\sqrt{1-\zeta^2}\over\zeta})\right)1(t) xo(t)=(1−1−ζ21e−ζωntsin(ωdt+arctanζ1−ζ2))1(t)
(1)求取上升时间 t r t_r tr:
我们可以根据上升时间的定义列的方程:
1 = 1 − 1 1 − ζ 2 e − ζ ω n t s i n ( ω d t + a r c t a n 1 − ζ 2 ζ ) 1=1-{1 \over \sqrt{1-\zeta^2}}\mathrm{e}^{-\zeta\omega_n t}\mathrm{sin}(\omega_d t+\mathrm{arctan}{\sqrt{1-\zeta^2}\over\zeta}) 1=1−1−ζ21e−ζωntsin(ωdt+arctanζ1−ζ2)
考虑到 e \mathrm{e} e的指数项不可能为0,所以只能是三角函数为0。那么由此可以很容易地列出方程:
ω d t + a r c t a n 1 − ζ 2 ζ = π \omega_d t+\mathrm{arctan}{\sqrt{1-\zeta^2}\over\zeta}=\pi ωdt+arctanζ1−ζ2=π
至于这里为什么不是取0而是去 π \pi π其实很简单,因为要是是等于0的话,解出来的 t t t是负的。而上升时间是首次到达稳态值的时间。
由此解得:
t r = 1 ω d ( π − a r c t a n 1 − ζ 2 ζ ) = 1 ω n 1 − ζ 2 ( π − a r c c o s ζ ) t_r={1\over \omega_d}\left(\pi-\mathrm{arctan}{\sqrt{1-\zeta^2}\over\zeta}\right)={1\over \omega_n\sqrt{1-\zeta^2}}(\pi-\mathrm{arccos}\zeta) tr=ωd1(π−arctanζ1−ζ2)=ωn1−ζ21(π−arccosζ)
(2)求取峰值时间 t p t_p tp:
老师上课的时候推导写了一大堆,结论非常简单,就是:
t p = π ω d t_p={\pi \over \omega_d} tp=ωdπ
这其实也非常的好理解, ω d \omega_d ωd其实代表了有阻尼系统对于激励的响应频率,那么第一次到达峰值的时候自然就是 π / ω d \pi/\omega_d π/ωd的时候了。
(3)求取最大超调量 M p M_p Mp:
把峰值时间 t p = π ω d t_p={\pi \over \omega_d} tp=ωdπ代入到如下这个式子里进行计算:
M p = x o ( t ) − 1 = ( 1 − e − ζ ω n t c o s ( ω d t ) − ζ 1 − ζ 2 e − ζ ω n t s i n ( ω d t ) ) 1 ( t ) − 1 M_p=x_o(t)-1=\left(1-\mathrm{e}^{-\zeta\omega_n t}\mathrm{cos}(\omega_dt)-{\zeta \over \sqrt{1-\zeta^2}}\mathrm{e}^{-\zeta\omega_n t}\mathrm{sin}(\omega_d t)\right)1(t)-1 Mp=xo(t)−1=(1−e−ζωntcos(ωdt)−1−ζ2ζe−ζωntsin(ωdt))1(t)−1
用眼睛也能看出来(正弦项等于0,余弦项等于-1):
M p = e − ζ ω n π ω d = e − ζ π 1 − ζ 2 M_p=\mathrm{e}^{-\zeta\omega_n{\pi\over \omega_d}}=\mathrm{e}^{-{\zeta\pi\over\sqrt{1-\zeta^2}}} Mp=e−ζωnωdπ=e−1−ζ2ζπ
还有调整时间和振荡次数的求解在这里就不多啰嗦了,就是把定义代进去算就好了。虽然老师上课的时候说这些公式能背的最好背出来,但是我是真的背不出来,我觉得最关键的还是在于记住 X o ( s ) = 1 s − s + ζ ω n ( s + ζ ω n ) 2 + ω d 2 − ζ ω n ( s + ζ ω n ) 2 + ω d 2 X_o(s)={1\over s}-{s+\zeta\omega_n\over(s+\zeta\omega_n)^2+\omega_d^2}-{\zeta\omega_n\over(s+\zeta\omega_n)^2+\omega_d^2} Xo(s)=s1−(s+ζωn)2+ωd2s+ζωn−(s+ζωn)2+ωd2ζωn。后面的其实都可以比较容易地推出来。