马尔可夫决策过程(Markov Decision Process, MDP)
马尔可夫决策过程(Markov Decision Processes,MDPs)
MDPs 简单说就是一个智能体(Agent)采取行动(Action)从而改变自己的状态(State)获得奖励(Reward)与环境(Environment)发生交互的循环过程。绝大多数的增强学习都可以模型化为MDP的问题。MDP 的策略完全取决于当前状态,这也是它马尔可夫性质的体现,根据当前的状态来决定动作。元组表示为:
状态的好坏其实等价于对未来回报的期望。因此,引入回报来表示某个时刻t的状态将具备的回报,我们的目标是选择一组最佳的action,使得全部的回报加权和期望最大:

从上式可以发现,在t时刻的回报值被打了 的折扣,是一个逐步衰减的过程,越靠后的状态对回报和影响越小。
的折扣,是一个逐步衰减的过程,越靠后的状态对回报和影响越小。
定义在当前状态下,执行某个策略![clip_image038[4]](http://img.e-com-net.com/image/info8/2f720a10d2634138917aa97dea54f34f.png "clip_image038[4]") 后,出现的结果的好坏,需要定义值函数(value function)
后,出现的结果的好坏,需要定义值函数(value function)

然而,在当前状态下,一个动作![clip_image038[7]](http://img.e-com-net.com/image/info8/f74f8b2ad388440a8c935e4521cc7451.png "clip_image038[7]") 可以产生不同的结果,由Bellman等式,根据转移概率从上式得到,其中s’表示下一个状态:
可以产生不同的结果,由Bellman等式,根据转移概率从上式得到,其中s’表示下一个状态:

当然,我们求V的目的就是想找到一个当前状态s下,最优的行动策略![clip_image038[8]](http://img.e-com-net.com/image/info8/fed1d8703a8946a49a04bc4aaac06374.png "clip_image038[8]") ,定义最优的V*,即从可选择的策略
,定义最优的V*,即从可选择的策略 挑选一个最优策略,如下:
挑选一个最优策略,如下:

上式的Bellman等式形式如下,第二项是一个![clip_image062[2]](http://img.e-com-net.com/image/info8/98c854bb081149c2a9a94e4cecd82844.png "clip_image062[2]") 就决定了每个状态s的下一步动作a,执行a后,s’按概率分布的回报概率和的期望:
就决定了每个状态s的下一步动作a,执行a后,s’按概率分布的回报概率和的期望:

定义了最优的V*,我们再定义最优的策略 如下:
如下:

选择最优的 ,也就确定了每个状态s的下一步最优动作a,根据以上式子,我们可以知道
,也就确定了每个状态s的下一步最优动作a,根据以上式子,我们可以知道

当前状态的最优的值函数V*,是由采用最优执行策略![clip_image069[1]](http://img.e-com-net.com/image/info8/686b863b28b74f40ad2a0348ef3f98e0.png "clip_image069[1]") 的情况下得出的,采用最优执行方案的回报显然要比采用其他的执行策略
的情况下得出的,采用最优执行方案的回报显然要比采用其他的执行策略![clip_image062[3]](http://img.e-com-net.com/image/info8/c88cab1b3d0743a99706386abd47bd50.png "clip_image062[3]") 要好。
要好。
这里需要注意的是,如果我们能够求得每个s下最优的a,那么从全局来看, 的映射即可生成,而生成的这个映射是最优映射,称为
的映射即可生成,而生成的这个映射是最优映射,称为![clip_image069[2]](http://img.e-com-net.com/image/info8/bdb555ea09ab4474832a69ed90f4ce84.png "clip_image069[2]") 。
。![clip_image069[3]](http://img.e-com-net.com/image/info8/3424bb08abaf48929a1e9f25c549f4b7.png "clip_image069[3]") 针对全局的s,确定了每一个s的下一个行动a,不会因为初始状态s选取的不同而不同。
针对全局的s,确定了每一个s的下一个行动a,不会因为初始状态s选取的不同而不同。
Exploration and Exploitation 探索与利用
在上面的算法中,我们可以看到需要使用某一个policy来生成动作,也就是说这个policy不是优化的那个policy,所以Q-Learning算法叫做Off-policy的算法。另一方面,因为Q-Learning完全不考虑model模型也就是环境的具体情况,只考虑看到的环境及reward,因此是model-free的方法。
回到policy的问题,那么要选择怎样的policy来生成action呢?有两种做法:
- 随机的生成一个动作
- 根据当前的Q值计算出一个最优的动作,这个policy ππ称之为greedy policy,也就是
π(St+1)=argmaxaQ(St+1,a)π(St+1)=argmaxaQ(St+1,a)
使用随机的动作就是exp成loration,也就是探索未知的动作会产生的效果,有利于更新Q值,获得更好的policy。而使用greedy policy也就是target policy则是exploitation,利用policy,这个相对来说就不好更新出更好的Q值,但可以得到更好的测试效果用于判断算法是否有效。
将两者结合起来就是所谓的ϵ−greedyϵ−greedy policy,ϵϵ一般是一个很小的值,作为选取随机动作的概率值。可以更改ϵ
的值从而得到不同的exploration和exploitation的比例。
Q-learning
Q-learning的核心是Q-table。Q-table的行和列分别表示state和action的值,Q-table的值Q(s,a)
Q Learning的思想完全根据value iteration得到。但要明确一点是value iteration每次都对所有的Q值更新一遍,也就是所有的状态和动作。但事实上在实际情况下我们没办法遍历所有的状态,还有所有的动作,我们只能得到有限的系列样本。因此,只能使用有限的样本进行操作。那么,怎么处理?Q Learning提出了一种更新Q值的办法:
虽然根据value iteration计算出target Q值,但是这里并没有直接将这个Q值(是估计值)直接赋予新的Q,而是采用渐进的方式类似梯度下降,朝target迈近一小步,取决于αα,这就能够减少估计误差造成的影响。整个训练过程其实就是原始Q值向目标 Q 值逼近的过程。类似随机梯度下降,最后可以收敛到最优的Q值。
具体的算法如下:
初始化Q(s,a),∀s∈S,a∈A(s)Q(s,a),∀s∈S,a∈A(s), 任意的数值,并且Q(terminal−state,⋅)=0Q(terminal−state,⋅)=0
重复(对每一节episode):
初始化 状态S
重复(对episode中的每一步):
使用某一个policy比如(ϵ−greedyϵ−greedy)根据状态S选取一个动作执行
执行完动作后,观察reward和新的状态S′S′
Q(St,At)←Q(St,At)+α(Rt+1+λmaxaQ(St+1,a)−Q(St,At))Q(St,At)←Q(St,At)+α(Rt+1+λmaxaQ(St+1,a)−Q(St,At))
S←S′S←S′
循环直到S终止
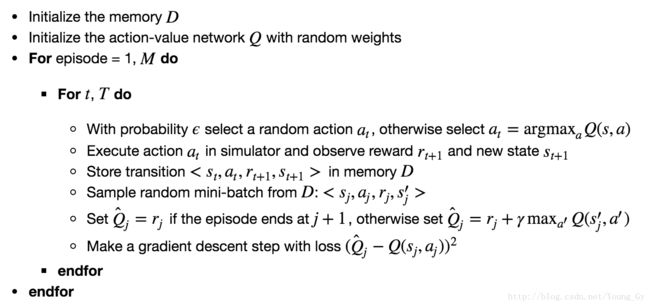
Deep-Q-learning
q-table存在一个问题,真实情况的state可能无穷多,这样q-table就会无限大,解决这个问题的办法是通过神经网络实现q-table。输入state,输出不同action的q-value。


Experience replay
强化学习由于state之间的相关性存在稳定性的问题,解决的办法是在训练的时候存储当前训练的状态到记忆体MM,更新参数的时候随机从MM中抽样mini-batch进行更新。
具体地,MM中存储的数据类型为 <s,a,r,s′>
Exploration and Exploitation 探索与利用
在上面的算法中,我们可以看到需要使用某一个policy来生成动作,也就是说这个policy不是优化的那个policy,所以Q-Learning算法叫做Off-policy的算法。另一方面,因为Q-Learning完全不考虑model模型也就是环境的具体情况,只考虑看到的环境及reward,因此是model-free的方法。
回到policy的问题,那么要选择怎样的policy来生成action呢?有两种做法:
- 随机的生成一个动作
- 根据当前的Q值计算出一个最优的动作,这个policy ππ称之为greedy policy,也就是
π(St+1)=argmaxaQ(St+1,a)π(St+1)=argmaxaQ(St+1,a)
使用随机的动作就是exploration,也就是探索未知的动作会产生的效果,有利于更新Q值,获得更好的policy。而使用greedy policy也就是target policy则是exploitation,利用policy,这个相对来说就不好更新出更好的Q值,但可以得到更好的测试效果用于判断算法是否有效。
将两者结合起来就是所谓的ϵ−greedyϵ−greedy policy,ϵϵ一般是一个很小的值,作为选取随机动作的概率值。可以更改ϵϵ的值从而得到不同的exploration和exploitation的比例。
算法