几种边缘检测算法对比及python代码实现
这里把参考到的几篇文章列一下:
https://www.jianshu.com/p/2a06c68f6c14
https://blog.csdn.net/sunny2038/article/details/9170013
https://blog.csdn.net/sunny2038/article/details/9202641
https://blog.csdn.net/sunny2038/article/details/9188441
边缘检测(边缘提取)是图像滤波的一种,最常用的主要有三种,Sobel算子,Laplacian算子,Canny算子。
1、Sobel算子
Sobel算子检测方法对灰度渐变和噪声较多的图像处理效果较好,sobel算子对边缘定位不是很准确,图像的边缘不止一个像素;当对精度要求不是很高时,是一种较为常用的边缘检测方法。是带有方向的。

图片源于网络

图片源于网络

图片源于网络
图片源于网络
在opencv-python中,Sobel算子的主函数代码为:
dst = cv2.Sobel(src, ddepth, dx, dy[, dst[, ksize[, scale[, delta[, borderType]]]]])前四个是必须的参数:
- 第一个参数是需要处理的图像;
- 第二个参数是图像的深度,-1表示采用的是与原图像相同的深度。目标图像的深度必须大于等于原图像的深度;
- dx和dy表示的是求导的阶数,0表示这个方向上没有求导,一般为0、1、2。
后边都是可选的参数:
- dst是输出图像;
- ksize是Sobel算子的大小,必须为1、3、5、7。
- scale是缩放导数的比例常数,默认情况下没有伸缩系数;
- delta是一个可选的增量,将会加到最终的dst中,同样,默认情况下没有额外的值加到dst中;
- borderType是判断图像边界的模式。这个参数默认值为cv2.BORDER_DEFAULT。
整体代码如下:
#coding=utf-8
import cv2
import numpy as np
img = cv2.imread("D:/lion.jpg", 0)
x = cv2.Sobel(img,cv2.CV_16S,1,0)
y = cv2.Sobel(img,cv2.CV_16S,0,1)
absX = cv2.convertScaleAbs(x) # 转回uint8
absY = cv2.convertScaleAbs(y)
dst = cv2.addWeighted(absX,0.5,absY,0.5,0)
cv2.imshow("absX", absX)
cv2.imshow("absY", absY)
cv2.imshow("Result", dst)
cv2.waitKey(0)
cv2.destroyAllWindows() 在Sobel函数的第二个参数这里使用了cv2.CV_16S。因为OpenCV文档中对Sobel算子的介绍中有这么一句:“in the case of 8-bit input images it will result in truncated derivatives”。即Sobel函数求完导数后会有负值,还有会大于255的值。而原图像是uint8,即8位无符号数,所以Sobel建立的图像位数不够,会有截断。因此要使用16位有符号的数据类型,即cv2.CV_16S。
在经过处理后,别忘了用convertScaleAbs()函数将其转回原来的uint8形式。否则将无法显示图像,而只是一副灰色的窗口。convertScaleAbs()的原型为:
dst = cv2.convertScaleAbs(src[, dst[, alpha[, beta]]])其中可选参数alpha是伸缩系数,beta是加到结果上的一个值。结果返回uint8类型的图片。
由于Sobel算子是在两个方向计算的,最后还需要用cv2.addWeighted(...)函数将其组合起来。其函数原型为:
dst = cv2.addWeighted(src1, alpha, src2, beta, gamma[, dst[, dtype]])其中alpha是第一幅图片中元素的权重,beta是第二个的权重,gamma是加到最后结果上的一个值。
2、Canny算子
Canny方法不容易受噪声干扰,能够检测到真正的弱边缘。优点在于,使用两种不同的阈值分别检测强边缘和弱边缘,并且当弱边缘和强边缘相连时,才将弱边缘包含在输出图像中。
Canny边缘检测算法可以分为以下5个步骤:
1) 使用高斯滤波器,以平滑图像,滤除噪声。
2) 计算图像中每个像素点的梯度强度和方向。
3) 应用非极大值(Non-Maximum Suppression)抑制,以消除边缘检测带来的杂散响应。
4) 应用双阈值(Double-Threshold)检测来确定真实的和潜在的边缘。
5) 通过抑制孤立的弱边缘最终完成边缘检测。
在施加非极大值抑制之后,剩余的像素可以更准确地表示图像中的实际边缘。然而,仍然存在由于噪声和颜色变化引起的一些边缘像素。为了解决这些杂散响应,必须用弱梯度值过滤边缘像素,并保留具有高梯度值的边缘像素,可以通过选择高低阈值来实现。如果边缘像素的梯度值高于高阈值,则将其标记为强边缘像素;如果边缘像素的梯度值小于高阈值并且大于低阈值,则将其标记为弱边缘像素;如果边缘像素的梯度值小于低阈值,则会被抑制。阈值的选择取决于给定输入图像的内容。
被划分为强边缘的像素点已经被确定为边缘,因为它们是从图像中的真实边缘中提取出来的。然而,对于弱边缘像素,将会有一些争论,因为这些像素可以从真实边缘提取也可以是因噪声或颜色变化引起的。为了获得准确的结果,应该抑制由后者引起的弱边缘。通常,由真实边缘引起的弱边缘像素将连接到强边缘像素,而噪声响应未连接。为了跟踪边缘连接,通过查看弱边缘像素及其8个邻域像素,只要其中一个为强边缘像素,则该弱边缘点就可以保留为真实的边缘。
Canny的输入是经过灰度化的单通道图。
在opencv-python中,Canny算子的主函数代码为:
edge = cv2.Canny(image, threshold1, threshold2[, edges[, apertureSize[, L2gradient ]]]) 必要参数:
- 第一个参数是需要处理的原图像,该图像必须为单通道的灰度图;
- 第二个参数是阈值1;
- 第三个参数是阈值2。
其中较大的阈值2用于检测图像中明显的边缘,但一般情况下检测的效果不会那么完美,边缘检测出来是断断续续的。所以这时候用较小的第一个阈值用于将这些间断的边缘连接起来。
可选参数中apertureSize就是Sobel算子的大小,默认为3。而L2gradient参数是一个布尔值,如果为真,则使用更精确的L2范数进行计算(即两个方向的倒数的平方和再开放),否则使用L1范数(直接将两个方向导数的绝对值相加)。
函数返回一副二值图,其中包含检测出的边缘。
完整代码为:
#coding=utf-8
import cv2
import numpy as np
img = cv2.imread("D:/lion.jpg", 0)
img = cv2.GaussianBlur(img,(3,3),0) #用高斯平滑处理原图像降噪。
canny = cv2.Canny(img, 50, 150) #最大最小阈值
cv2.imshow('Canny', canny)
cv2.waitKey(0)
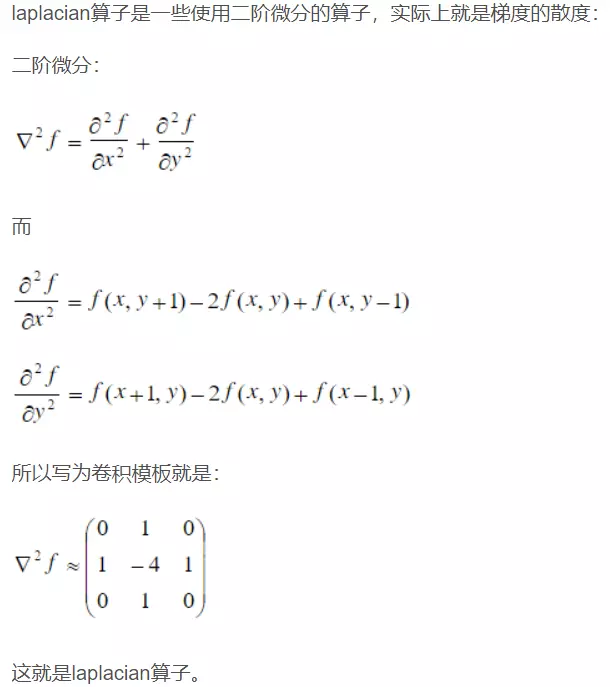
cv2.destroyAllWindows()3、Laplacian算子
Laplacian算子是一种二阶微分算子。对噪声比较敏感,所以很少用该算子检测边缘,而是用来判断边缘像素视为与图像的明区还是暗区。拉普拉斯高斯算子是一种二阶导数算子,将在边缘处产生一个陡峭的零交叉, Laplacian算子是各向同性的,能对任何走向的界线和线条进行锐化,无方向性。这是拉普拉斯算子区别于其他算法的最大优点。
在opencv-python中,Laplacian算子的主函数代码为;
dst = cv2.Laplacian(src, ddepth[, dst[, ksize[, scale[, delta[, borderType]]]]])参数的含义类似于sobel算子:
前两个是必须的参数:
- 第一个参数是需要处理的图像;
- 第二个参数是图像的深度,-1表示采用的是与原图像相同的深度。目标图像的深度必须大于等于原图像的深度;
其后是可选的参数:
- dst不用解释了;
- ksize是算子的大小,必须为1、3、5、7。默认为1。
- scale是缩放导数的比例常数,默认情况下没有伸缩系数;
- delta是一个可选的增量,将会加到最终的dst中,同样,默认情况下没有额外的值加到dst中;
- borderType是判断图像边界的模式。这个参数默认值为cv2.BORDER_DEFAULT。
完整代码为:
#coding=utf-8
import cv2
import numpy as np
img = cv2.imread("D:/lion.jpg", 0)
gray_lap = cv2.Laplacian(img,cv2.CV_16S,ksize = 3)
dst = cv2.convertScaleAbs(gray_lap)
cv2.imshow('laplacian',dst)
cv2.waitKey(0)
cv2.destroyAllWindows()也可以像canny算子中的代码一样,先经过一些滤波来降噪,然后再做边缘检测。