基于Qt的wifi智能小车的制作(一)
基于Qt的wifi智能小车的制作(一)
好久不写博客了,真的是有点惭愧了。翻开上一次的博客,到现在已经2个多月了,只能说是自己太懒惰了!忙是另一回事!趁今天晚上有点时间回顾下这一段时间的收获以及做的一些东西,算是一份笔记,一遍以后能回想起。
首先说说开始做的一款wifi小车吧,一方面是因为个人的爱好,一方面算是其他原因。首先上几张小车照片。


由于光线原因,可能不太清楚。一下是我的上位机,基于Qt的,总体感觉还是挺漂亮的,不过最主要的还是有美工的帮助了,在这里多谢这位美工了。(小车控制主界面)

再来一张配置控制协议。其中有视频流地址、控制地址以及端口号,控制动作命令等等……

其实做这个小车根本没有多少难度的,之所以要做也是自己的爱好罢了,今天在这里记录下一些珍贵的东西,希望自己以后看到后能想起其中的过程,最让人享受的还是做某一件东西的过程。希望高手最下留情。
1.下位机
下位机简单来说就是利用stm32控制驱动小车做动作,不外乎前进、后退、左转、右转、停止,在加上云台的上升,下降,左转和右转,实现的基本原理很简单,使用的驱动的L298N,控制起来也最简单;而云台方向的控制就是利用PWM进行控制。
首先说说舵机的控制吧,这个用到了PWM,下车速度也是利用这个控制的。
舵机的相关原理
1)什么是舵机
在机器人机电控制系统中,舵机控制效果是性能的重要影响因素。舵机可以在微机电系统和航模中作为基本的输出执行结构,其简单的控制和输出使得单片 机系统非常容易与之接口。舵机是一种位置(角度)伺服的驱动器,适用于那些需要不断变化并可以保持的控制系统。
2)舵机工作原理
控制信号由接收机的通道进入信号调制芯片,获得直流偏置电压。它内部有一个基准电路,产生周期为 20ms,宽度为 1.5ms 的基准信号,将获得的直流偏置电压与电位器的电压比较,获得电压差输出。最后,电压差的正负输出到电机驱动芯片决定电机的正反转。当电机转速一定时,通过级联减速齿轮带动电位器旋转,使得电压差为 0,电机停止转动。当然我们可以不用去了解它的具体工作原理,知道它的控制原理就够了
3)舵机的控制
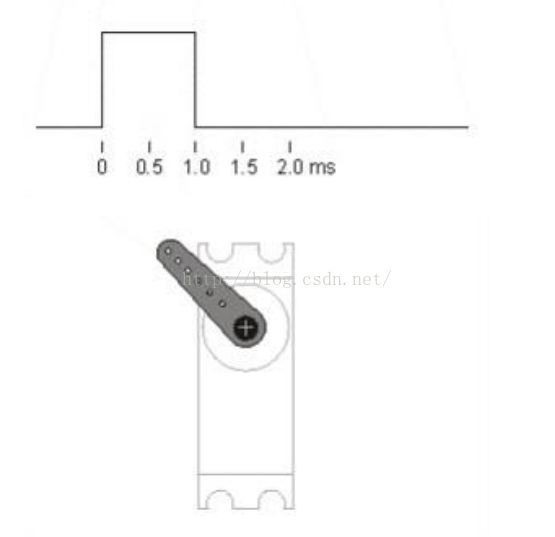
舵机的控制一般需要一个 20ms 左右的时机脉冲,该脉冲的高电平部分一般为0.5ms~2.5ms 范围内的角度控制脉冲部分。以 180 度角度伺服为例,那么对应的控制关系为。
0.5ms-------------0 度
1.0ms-------------45 度
1.5ms-------------90 度
2.0ms-------------135 度
2.5ms-------------180 度
具体的描述如下图所示:
4)实现程序代码:硬件连接:云台上下转动舵机连接 VCC、 GND、 PB6;云台左右转动舵机连接 VCC、GND、 PB8
#define ANGLE_000 2 //0 度 #define ANGLE_045 10 //45 度 #define ANGLE_090 15 //90 度 #define ANGLE_135 20 //135 度 #define ANGLE_180 28 //180 度 /* 全局变量 */ static u8 CloudStand_Horizontal_Line = 15; //云台水平移动 static u8 CloudStand_Vertical_Line = 15; //云台垂直移动
/* TIM4 PWM 部分初始化, PWM 输出初始化, arr 为自动重装值; psc 为时钟 预分频数 */static void TIM4_PWM_Init(u16 arr,u16 psc) { GPIO_InitTypeDef GPIO_InitStructure; TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure; TIM_OCInitTypeDef TIM_OCInitStructure;下面切记两个 APB 时钟初始化,调用不同的初始化函数,有同学不注意,经常 在这里出问题。 RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB | RCC_APB2Periph_AFIO, ENABLE);RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM4,ENABLE); //设置该引脚为复用输出功能,输出 TIM4 的 PWM 脉冲波形 GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6 | GPIO_Pin_8; //TIM_CH1 TIM_CH3 GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //复用推挽输出 GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; GPIO_Init(GPIOB, &GPIO_InitStructure); //初始化 GPIO //初始化 TIM4 TIM_TimeBaseStructure.TIM_Period = arr; //设置在下一个更新事件装入活动的自动重装载寄存器周期的值 TIM_TimeBaseStructure.TIM_Prescaler = psc; //设置用来作为 TIMx 时钟频率除数的预分频值 TIM_TimeBaseStructure.TIM_ClockDivision = 0; //设置时钟分割 TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //TIM 向上计数模式 TIM_TimeBaseInit(TIM4, &TIM_TimeBaseStructure); //根据 TIM_TimeBaseInitStruct 中指定的参数初始化 TIMx 的时间基数单位 //初始化 TIM4 通道 1 PWM 模式 TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM2; //选择定时器模式:TIM 脉冲宽度调制模式 2 TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; //正向通道有效 TIM_OCInitStructure.TIM_Pulse = 300; //占空时间 总的周期为 20ms 占空时间为约为 1ms TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_Low; //输出极性:TIM 输出比较极性高 这 里 的 TIM_OC1Init 、 TIM_OC1PreloadConfig 、 TIM_OC3Init 、 TIM_OC3PreloadConfig 的调用,库函数已经将管脚和 TIM 的通道进行匹配,读者一 定要与自己的配置符合。 TIM_OC1Init(TIM4, &TIM_OCInitStructure); TIM_OC1PreloadConfig(TIM4, TIM_OCPreload_Enable); //使能预装载寄存器 //初始化 TIM4 通道 3 PWM 模式 TIM_OC3Init(TIM4, &TIM_OCInitStructure); TIM_OC3PreloadConfig(TIM4, TIM_OCPreload_Enable); //使能预装载寄存器 TIM_ARRPreloadConfig(TIM4, ENABLE); TIM_Cmd(TIM4, ENABLE); //使能 TIM4 CloudStand_Middle(); } void CloudStand_Up(void) { if(CloudStand_Vertical_Line > ANGLE_000 +1 ) { CloudStand_Vertical_Line--; TIM_SetCompare1(TIM4,CloudStand_Vertical_Line);注意:这里的 TIM_SetCompare1、 TIM_SetCompare3 函数的调用,要与前面的 硬件连接管脚、 TIM 通道一致,因为本人此处为 TIM1 通道和 TIM3 通道,所以这里调用 TIM_SetCompare1、 TIM_SetCompare3 函数。 //将上下转动值与寄存器 1 中的值进行比较,左右转动值和寄存器 3 中的值进 行比较 } if(CloudStand_Vertical_Line == ANGLE_000 +1 ) { CloudStand_Vertical_Line++; } } void CloudStand_Down(void) { if(CloudStand_Vertical_Line < ANGLE_180 -1 ) { CloudStand_Vertical_Line++; TIM_SetCompare1(TIM4,CloudStand_Vertical_Line); } if(CloudStand_Vertical_Line == ANGLE_180 -1 ) { CloudStand_Vertical_Line--; } }void CloudStand_Left(void) { if(CloudStand_Horizontal_Line > ANGLE_000 +1 ) { CloudStand_Horizontal_Line--; TIM_SetCompare3(TIM4,CloudStand_Horizontal_Line); } if(CloudStand_Horizontal_Line == ANGLE_000 +1 ) { CloudStand_Horizontal_Line++; } }void CloudStand_Right(void) {if(CloudStand_Horizontal_Line < ANGLE_180 -1 ) { CloudStand_Horizontal_Line++; TIM_SetCompare3(TIM4,CloudStand_Horizontal_Line); }if(CloudStand_Horizontal_Line == ANGLE_180 -1 ) { CloudStand_Horizontal_Line--; } }void CloudStand_Middle(void) { CloudStand_Horizontal_Line = 15; CloudStand_Vertical_Line = 15; TIM_SetCompare1(TIM4,ANGLE_000); TIM_SetCompare3(TIM4,ANGLE_090); }void CloudStand_Init(void) { TIM4_PWM_Init(199,7199); //PWM 频率 = 50Hz }
小车方向控制相关原理
小车的方向就是通过控制stm32管脚的电平的高低来驱动LM298N实现所要的功能。详情看附件中的代码。在这里就不做过多的介绍,介绍多了会被人说成……………………。
技术在于交流、分享……
2.上位机
在下一篇中将重点记录上位机功能的实现。
博客地址:http://blog.csdn.net/u013704336\
Email:[email protected]
QQ:936563422