Arduino智能物流小车项目(MEGA2560)
因为这是我做的第一个项目,然后平时也不太喜欢拍照。再加上有强迫症,没事喜欢清理文件相册。导致这个项目的材料照片文件十分匮乏(其实几乎都没了)。这是用的一些仅存残余文件,来写本人的第一篇博客,算是留作纪念也算是一个新旅程的开端。
另外可以看看我的另一篇博客——Arduino智能物流小车各部分功能代码详解(省工程训练能力综合竞赛)。
https://github.com/A-HUAN/Arduino-Logistics-car
1.项目功能要求
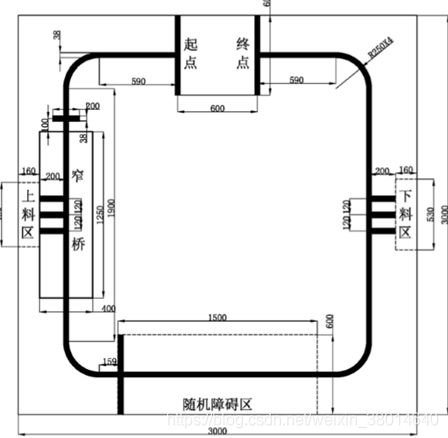
去年暑假前报了某比赛(工程训练能力综合竞赛),比赛要求是做一个智能物流小车。项目要求小车实现的功能有—“赛道自主行走、物料扫码识别、规避障碍、跨越减速带和栅格、码垛和规避循迹的功能。”
2.小车组成构架

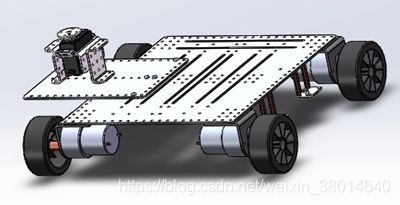
a.小车底盘设计
小车底盘主要组成是:直流电机、电机支架、孔平板、联轴器、轮胎组成。
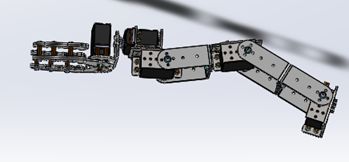
b.机械臂及抓取设计
考虑到机械臂需要实现的功能以及机械臂与物料台之间的协调性,设计了6自由度的机械臂,并且用舵机来作为机械臂的关节。
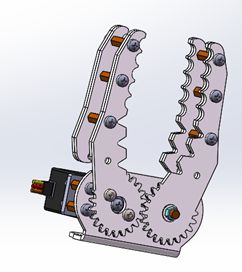
抓取部件需要 — 咬合力大;结构简单切材料刚性好;接触点与物料之间的摩擦力大
c.物料台设计
考虑到小车的车型,以及物料台和机械臂之间的距离,选择在小车旁边加一块小车铝合金板,在铝合金板上固定舵机,舵机上放通过金属舵盘和亚克力物料台固定,从而实现舵机对物料架的控制。

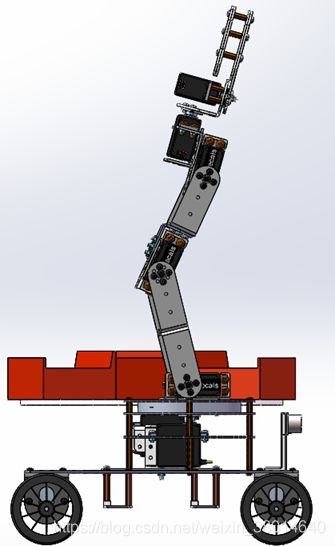
d. 小车主视图与左视图
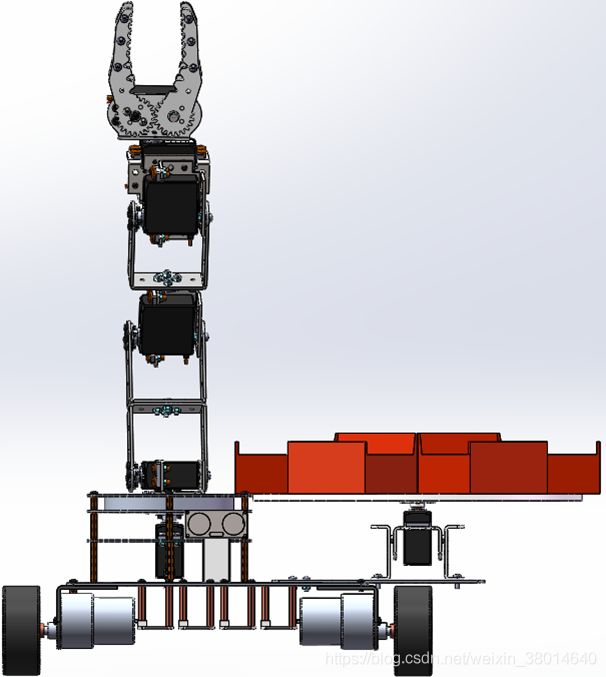
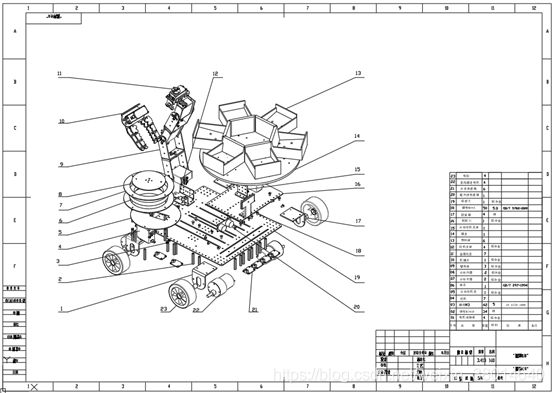
e.小车爆炸图
3.主要零部件
| 名称 | 型号 |
|---|---|
| 主控板 | MEGA2560及扩展板 |
| 灰度传感器 | TCRT5000 |
| 超声波 | HC-SR04 |
| 降压模块 | LM2596 |
| 直流电机 | JGB37-520 |
| 金属舵机 | D3625MG/PDI6225MG |
| 舵机板 | 16位舵机板 |
| 电池 | 9V电池 |
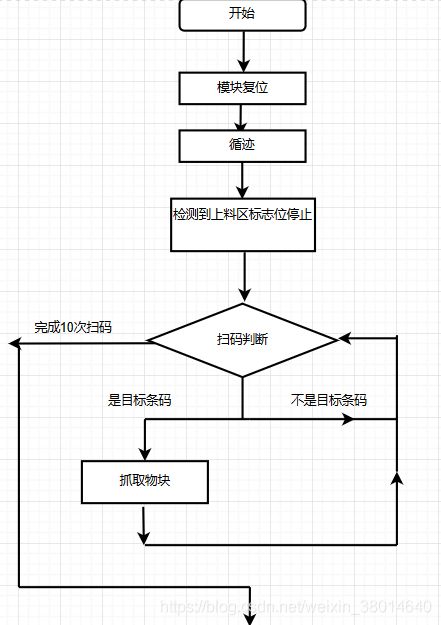
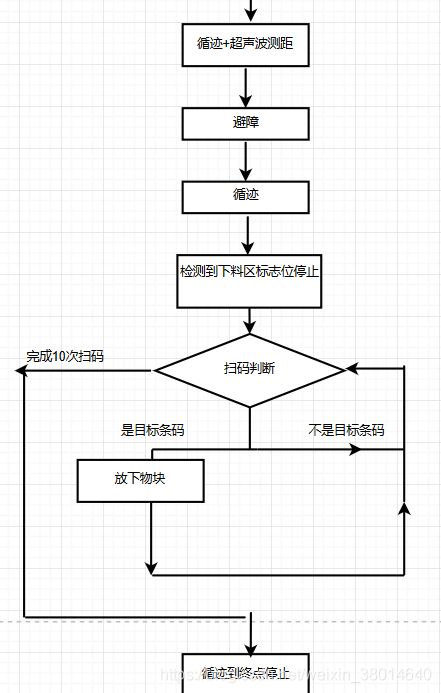
4.程序流程图
5.成品展示
1.0初期版本(电线凌乱,布局混乱,物料架仅能放三个物体)
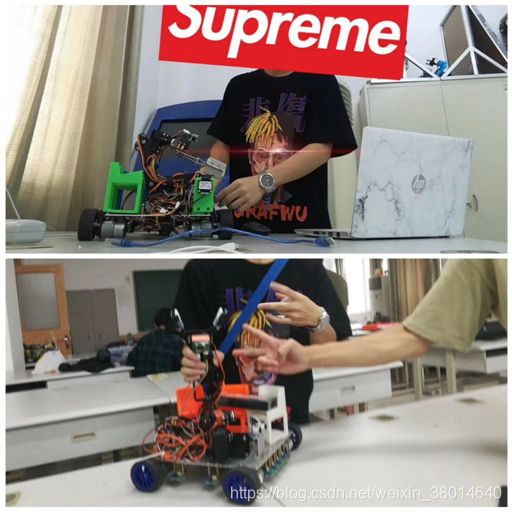
2.0升级版本
6.终极代码
#include
#include
#include
#include
#define STOP 0
#define FORWARD 1
#define BACKWARD 2
#define TURNLEFT 3
#define TURNRIGHT 4
#define FRAME_HEADER 0xFF //帧头
#define CMD_SERVO_SPEED 0x01 //设置舵机速度
#define CMD_SERVO_PLACE 0x02 //设置舵机位置
#define CMD_ACTION_GROUP_RUN 0x09 //运行动作组
#define CMD_STOP_REFRESH 0x0b //急停、恢复指令
#define GET_LOW_BYTE(A) (uint8_t)((A)) //宏函数 获得A的低八位
#define GET_HIGH_BYTE(A) (uint8_t)((A) >> 8) //宏函数 获得A的高八位
int leftMotor1 = 14;
int leftMotor2 = 15;
int rightMotor1 = 16;
int rightMotor2 = 17;//定义电机
int trac1 =11;
int trac2 = 10;
int trac3 = 9;
int trac4 = 8; //定义前侧红外/从车头方向的最右边开始排序
int trac5 = 7;
int trac6 = 6;//定义右侧红外
int inputPin =4; // 定义超声波信号接收接口
int outputPin =5; // 定义超声波信号发出接口
int leftPWM = 3;
int rightPWM = 2;//定义调速
int Flag_1 = 0; //取物料标志
int Flag_2 = 0; //放物料标志
int dis;
int q,w,e,r= 0;
int data[6];//定义红外读取数组
int i,j;
int Position=0;
char scanflag = ' ';
String SciString = " ";
boolean flag_SetSeiDecMod = true;
boolean flag_StaDec = false;
unsigned char SetSeiDecMod[] = {0x07,0xC6,0x04,0x00,0xFF,0x8A,0x08,0xFD,0x9E};
unsigned char StaDec[] = {0x04,0xE4,0x04,0x00,0xFF,0x14};
SoftwareSerial mySerial(12,13); // TX,RX
SoftwareSerial ServoSerial(19,18); // RX, TX 软串口
void setup()
{
Serial.begin(9600); //串口初始化
ServoSerial.begin(9600);
mySerial.begin(9600);
pinMode(leftMotor1, OUTPUT);
pinMode(leftMotor2, OUTPUT);
pinMode(rightMotor1, OUTPUT);
pinMode(rightMotor2, OUTPUT);
pinMode(leftPWM, OUTPUT);
pinMode(rightPWM, OUTPUT); //测速引脚初始化
pinMode(trac1, INPUT);
pinMode(trac2, INPUT);
pinMode(trac3, INPUT);
pinMode(trac4, INPUT);
pinMode(trac5, INPUT);
pinMode(trac6, INPUT);
pinMode(inputPin, INPUT);
pinMode(outputPin, OUTPUT); //超声波控制引脚初始化
}
void motorRun(int cmd,int value)
{
analogWrite(leftPWM, value); //设置PWM输出,即设置速度
analogWrite(rightPWM, value);
switch(cmd){
case FORWARD:
Serial.println("FORWARD"); //输出状态
digitalWrite(leftMotor1, HIGH);
digitalWrite(leftMotor2, LOW);
digitalWrite(rightMotor1, LOW);
digitalWrite(rightMotor2, HIGH);
break;
case BACKWARD:
Serial.println("BACKWARD"); //输出状态
digitalWrite(leftMotor1, LOW);
digitalWrite(leftMotor2,HIGH );
digitalWrite(rightMotor1,HIGH );
digitalWrite(rightMotor2,LOW);
break;
case TURNLEFT:
Serial.println("TURN LEFT"); //输出状态
digitalWrite(leftMotor1, HIGH);
digitalWrite(leftMotor2, LOW);
digitalWrite(rightMotor1, HIGH);
digitalWrite(rightMotor2, LOW);
break;
case TURNRIGHT:
Serial.println("TURN RIGHT"); //输出状态
digitalWrite(leftMotor1, LOW);
digitalWrite(leftMotor2, HIGH);
digitalWrite(rightMotor1, LOW);
digitalWrite(rightMotor2, HIGH);
break;
default:
Serial.println("STOP"); //输出状态
digitalWrite(leftMotor1, LOW);
digitalWrite(leftMotor2, LOW);
digitalWrite(rightMotor1, LOW);
digitalWrite(rightMotor2, LOW);
}
}
void tracing()
{
data[0] = digitalRead(11);
data[1] = digitalRead(10);
data[2] = digitalRead(9);
data[3] = digitalRead(8);
data[4] = digitalRead(7);
data[5] = digitalRead(6);
if((!data[0] && data[1] && data[2] && !data[3]))
{
motorRun(FORWARD,255);
}
else if(data[0] && data[1] && data[2] && data[3])
{
motorRun(FORWARD,255);
}
else if(!data[0] && data[1] && data[2] && data[3])
{
motorRun(FORWARD,255);
}
else if(!data[0] && !data[1] && data[2] && data[3])
{
motorRun(TURNLEFT, 225);
}
else if(data[2] || data[3])
{
motorRun(TURNLEFT, 225);
}
else if(data[0] || data[1])
{
motorRun(TURNRIGHT, 225);
}
}
void tracing2()
{
data[0] = digitalRead(11);
data[1] = digitalRead(10);
data[2] = digitalRead(9);
data[3] = digitalRead(8);
data[4] = digitalRead(7);
data[5] = digitalRead(6);
if((!data[0] && data[1] && data[2] && !data[3]))
{
motorRun(FORWARD,220);
}
else if(data[0] && data[1] && data[2] && data[3])
{
motorRun(FORWARD,220);
}
else if(!data[0] && data[1] && data[2] && data[3])
{
motorRun(FORWARD,220);
}
else if(data[0] && data[1] && data[2] && !data[3])
{
motorRun(FORWARD,220);
}
else if(data[0] && data[1] && !data[2] && !data[3])
{
motorRun(FORWARD,220);
}
else if(!data[0] && !data[1] && data[2] && data[3])
{
motorRun(TURNLEFT, 200);
}
else if( data[2] || data[3])
{
motorRun(TURNLEFT, 200);
}
else if(data[0] || data[1])
{
motorRun(TURNRIGHT, 200);
}
}
void tracing3()
{
data[0] = digitalRead(11);
data[1] = digitalRead(10);
data[2] = digitalRead(9);
data[3] = digitalRead(8);
data[4] = digitalRead(7);
data[5] = digitalRead(6);
if((data[1] && data[2]))
{
motorRun(FORWARD,220);
}
else if( data[0] && data[1])
{
motorRun(FORWARD,220);
}
else if( data[1] && !data[2])
{
motorRun(TURNRIGHT, 180);
}
else if(!data[1] && data[2])
{
motorRun(TURNLEFT, 180);
}
}
void moveServo(uint8_t servoID, uint16_t Position1, uint16_t Speed)
{
uint8_t buf[15];
Position1 = Position1*100/9+500;
buf[0] = FRAME_HEADER;
buf[1] = CMD_SERVO_SPEED;
buf[2] = servoID;
buf[3] = GET_LOW_BYTE(Speed);
buf[4] = GET_HIGH_BYTE(Speed);
buf[5] = FRAME_HEADER;
buf[6] = CMD_SERVO_PLACE;
buf[7] = servoID;
buf[8] = GET_LOW_BYTE(Position1);
buf[9] = GET_HIGH_BYTE(Position1);
ServoSerial.write(buf, 10);
}
void servo_(int D1, int D2, int D3, int D4, int D5, int D6)
{
int old[6] = {90,90,90,90,90,90};//初始位置
int d[6];
int t[6];
int d_max = 0;
int t_max = 0;
int speed;
int place[6] = {D1, D2, D3, D4, D5, D6 };
for (int i = 0; i < 6; i++)
{
d[i] = abs(place[i] - old[i]);
if (d[i] > d_max)
{
d_max = d[i];
}
old[i] = place[i];
}
for (int i = 0; i < 6; i++)
{
if (d_max >= 60)
{
speed = d[i] * 16 / d_max;
}
else
{
speed = d[i] * 10 / d_max;
}
if ((d[i] > 140) && (i == 1))
{
speed = 20;
}
if (speed > 20)
{
speed = 20;
}
if (speed <= 5)
{
speed = 5;
}
moveServo(i, place[i], speed*3/2);
t[i] = d[i] * 112 / speed;
if (t[i] > t_max)
{
t_max = t[i];
}
}
//delay(t_max);
}
char scan()
{
char get_char = ' ';
Position=0;
if(flag_SetSeiDecMod == true) //模块初始化功能
{
for(i = 0;i < sizeof(SetSeiDecMod);i++)
{
mySerial.write(SetSeiDecMod[i]);
delay(1);
}
flag_SetSeiDecMod = 0;
flag_StaDec = 1;
}
if(flag_StaDec == 1) //模块扫码功能
{
for(i = 0;i < sizeof(StaDec);i++)
{
mySerial.write(StaDec[i]);
delay(1);
}
}
delay(10);
while(mySerial.available()) //所扫的字符串返回
{
char inChar = (char)mySerial.read();
delay(5);
SciString += inChar;
}
Position = SciString.indexOf('Z'); //找到字符Z的位置
if(Position != -1) //字符'Z'找到
{
SciString = SciString.substring(Position,SciString.length()); //截取有效字符串 e.g sdaaf,ZJGXDS01 ---------> ZJGXDS01
// 返回的字符串 截取到有效的字符串
get_char = SciString.charAt(7); // 返回第7位字符 e.g ZJGXDS01 ----> 1
SciString = ""; //接受字符串清空
return get_char; //返回有效字符串的最后一位字符
}
else //字符'Z'未能找到
{
flag_SetSeiDecMod = 1; //初始化标志位 方便第二次扫码
flag_StaDec = 0;
SciString = ""; //接受字符串清空
get_char = ' '; //返回空字符
return get_char;
}
}
void judgment1()
{
switch(scanflag)
{
case '1': //***************************抽签调整**********************************
moveServo(6, 0, 15);
delay(300);
grab1();
break;
case '2': //***************************抽签调整**********************************
moveServo(6, 36, 15);
delay(300);
grab1();
break;
case '3' : //***************************抽签调整**********************************
moveServo(6, 72, 15);
delay(300);
grab1();
break;
case '4': //***************************抽签调整**********************************
moveServo(6, 108, 15);
delay(300);
grab1();
break;
case '5': //***************************抽签调整**********************************
moveServo(6, 144, 15);
delay(300);
grab1();
break;
case '7' : //***************************抽签调整**********************************
moveServo(6, 180, 15);
delay(300);
grab1();
break;
}
Serial.println(scanflag);
while(mySerial.read() >= 0){}
/*while(mySerial.available()>0)
mySerial.read();*/
}
void judgment2()
{
switch(scanflag)
{
case '1': //***************************抽签调整**********************************
moveServo(6, 0, 15);
delay(300);
grab2();
break;
case '2': //***************************抽签调整**********************************
moveServo(6, 36, 15);
delay(300);
grab2();
break;
case '3' : //***************************抽签调整**********************************
moveServo(6, 72, 15);
delay(300);
grab2();
break;
case '4': //***************************抽签调整**********************************
moveServo(6, 108, 15);
delay(300);
grab2();
break;
case '5': //***************************抽签调整**********************************
moveServo(6, 144, 15);
delay(300);
grab2();
break;
case '7' : //***************************抽签调整**********************************
moveServo(6, 180, 15);
delay(300);
grab2();
break;
}
initial_a();
delay(500);
Serial.println(scanflag);
while(mySerial.read() >= 0){}
/*while(mySerial.available()>0)
mySerial.read();*/
Flag_1=Flag_1+1;
motorRun(FORWARD,200);
delay(300);
}
void judgment3()
{
switch(scanflag)
{
case '1': //***************************抽签调整**********************************
moveServo(6, 0, 15);
delay(500);
laydown();
break;
case '2': //***************************抽签调整**********************************
moveServo(6, 36, 15);
delay(500);
laydown();
break;
case '3' : //***************************抽签调整**********************************
moveServo(6, 72, 15);
delay(500);
laydown();
break;
case '4' : //***************************抽签调整**********************************
moveServo(6, 108, 15);
delay(500);
laydown();
break;
case '5': //***************************抽签调整**********************************
moveServo(6, 144, 15);
delay(500);
laydown();
break;
case '7' : //***************************抽签调整**********************************
moveServo(6, 180, 15);
delay(500);
laydown();
break;
}
Serial.println(scanflag);
while(mySerial.read() >= 0){}
/*while(mySerial.available()>0)
mySerial.read();*/
}
void judgment4()
{
switch(scanflag)
{
case '1': //***************************抽签调整**********************************
moveServo(6, 0, 15);
delay(500);
layup();
break;
case '2': //***************************抽签调整**********************************
moveServo(6, 36, 15);
delay(500);
layup();
break;
case '3' : //***************************抽签调整**********************************
moveServo(6, 72, 15);
delay(500);
layup();
break;
case '4': //***************************抽签调整**********************************
moveServo(6, 108, 15);
delay(500);
layup();
break;
case '5': //***************************抽签调整**********************************
moveServo(6, 144, 15);
delay(500);
layup();
break;
case '7' : //***************************抽签调整**********************************
moveServo(6, 180, 15);
delay(500);
layup();
break;
}
initial_b();
delay(500);
Serial.println(scanflag);
while(mySerial.read() >= 0){}
/*while(mySerial.available()>0)
mySerial.read();*/
Flag_2=Flag_2+1;
motorRun(FORWARD,200);
delay(300);
}
void initial_a()
{
servo_(129,70,108,161,91,65);
}
void initial_b() //下料扫码down位
{
servo_(128,106,50,124,91,65);
}
void grab1()
{
e=e+1;
servo_(129,61,99,146,93,75);
delay(300);
servo_(129,61,99,146,93,45);
delay(300);
servo_(129,77,99,146,93,45);
delay(300);
servo_(11,97,74,138,85,45);
delay(1200);
servo_(11,100,65,149,85,45);
delay(300);
servo_(11,86,65,149,85,45);
delay(300);
servo_(11,86,65,149,85,75);
delay(300);
servo_(11,95,70,140,93,75);
delay(300);
servo_(129,80,95,134,93,70);
delay(1200);
}
void grab2()
{
e=e+1;
servo_(129,57,92,120,93,70);
delay(300);
servo_(129,57,92,120,93,45);
delay(300);
servo_(129,86,92,117,93,45);
delay(300);
servo_(11,100,80,138,85,45);
delay(1200);
servo_(11,100,65,149,85,45);
delay(300);
servo_(11,95,52,140,85,45);
delay(300);
servo_(11,95,52,140,85,70);
delay(300);
servo_(11,100,74,137,85,70);
delay(300);
}
void layup()
{
e=e+1;
servo_(13,90,90,162,85,70);
delay(1200);
servo_(13,68,92,162,85,70);
delay(300);
servo_(13,68,92,162,85,45);
delay(300);
servo_(13,92,92,162,85,45);
delay(300);
servo_(128,98,79,124,95,45);
delay(1200);
servo_(128,77,83,124,95,45);
delay(300);
servo_(128,77,83,130,95,67);
delay(300);
servo_(128,105,79,130,95,67);
delay(300);
}
void laydown()
{
e=e+1;
servo_(128,106,90,124,91,65);
delay(300);
servo_(13,90,90,162,85,70);
delay(1200);
servo_(13,68,92,162,85,70);
delay(300);
servo_(13,68,92,162,85,45);
delay(300);
servo_(13,92,92,162,85,45);
delay(300);
servo_(128,90,79,162,90,45);
delay(1200);
servo_(128,120,79,162,90,45);
delay(300);
servo_(128,120,49,121,90,45);
delay(300);
servo_(128,91,49,110,90,45);
delay(500);
servo_(128,91,49,110,90,67);
delay(500);
servo_(128,117,38,110,90,67);
delay(500);
}
void loop()
{
//initial_b();
//Flag_1=99;
//Flag_2=1;
initial_a();
motorRun(FORWARD,255);
delay(200);
//Flag_1=8;
while(Flag_1 == 0)
{
tracing();//循迹
if(data[0]&&data[1]&&data[2]&&data[3])
{
motorRun(FORWARD,255);
delay(200);
Flag_1= 1;
}
}
while(Flag_1 == 1) //上坡十字调整
{
tracing3();
if(data[0]&&data[1]&&!data[3])
{Flag_1 = 2;}
}
while(Flag_1 == 2)
{
data[4] = digitalRead(7);
motorRun(FORWARD,220);
//tracing3();
if(data[4])
{ Flag_1 = 3;}
}
while(Flag_1 == 3) //上料第一次停止
{
motorRun(BACKWARD,150);
delay(410); //上料第一次急停调整
motorRun(STOP,0);
servo_(129,65,108,162,91,70); //上料区第一次扫码1
delay(300);
q=162;
while(r==0)
{
scanflag == ' ';
scanflag = scan();
Serial.println("scan");
delay(200);
if(scanflag != ' ')
{
r=r+1;
}
q=q-1;
servo_(129,65,108,q,91,70);
}
judgment1();
servo_(129,63,95,134,91,70); //上料区第一次扫码2
delay(300);
q=134;
while(r==1)
{
scanflag == ' ';
scanflag = scan();
Serial.println("scan");
delay(200);
if(scanflag != ' ')
{
r=r+1;
}
q=q-1;
servo_(129,63,95,q,91,70);
}
judgment2();
}
while( Flag_1 == 4) //上料第二次停止
{
data[4] = digitalRead(7);
r=0;
motorRun(FORWARD,200);
if(data[4])
{
motorRun(BACKWARD,150);
delay(110); //上料第二次急停调整
motorRun(STOP,0);
servo_(129,65,108,162,91,70); //上料区第二次扫码1
delay(300);
q=162;
while(r==0)
{
scanflag == ' ';
scanflag = scan();
Serial.println("scan");
delay(200);
if(scanflag != ' ')
{
r=r+1;
}
q=q-1;
servo_(129,65,108,q,91,70);
}
judgment1();
servo_(129,63,95,134,91,70); //上料区第二次扫码2
delay(300);
q=134;
while(r==1)
{
scanflag == ' ';
scanflag = scan();
Serial.println("scan");
delay(200);
if(scanflag != ' ')
{
r=r+1;
}
q=q-1;
servo_(129,63,95,q,91,70);
}
judgment2();
}
}
while( Flag_1 == 5) //上料第三次停止
{
r=0;
motorRun(FORWARD,200);
data[4] = digitalRead(7);
if(data[4] )
{
motorRun(BACKWARD,150);
delay(200); //上料第三次急停调整
motorRun(STOP,0);
servo_(129,65,108,162,91,70); //上料区第三次扫码1
delay(300);
q=162;
while(r==0)
{
scanflag == ' ';
scanflag = scan();
Serial.println("scan");
delay(200);
if(scanflag != ' ')
{
r=r+1;
}
q=q-1;
servo_(129,65,108,q,91,70);
}
judgment1();
servo_(129,63,95,134,91,70); //上料区第三次扫码2
delay(300);
q=134;
while(r==1)
{
scanflag == ' ';
scanflag = scan();
Serial.println("scan");
delay(200);
if(scanflag != ' ')
{
r=r+1;
}
q=q-1;
servo_(129,63,95,q,91,70);
}
judgment2();
}
}
while(Flag_1 == 6) //上料第四次停止
{
if(e>=6)
{
Flag_1=8;
}
r=0;
motorRun(FORWARD,200);
data[4] = digitalRead(7);
if(data[4])
{
motorRun(BACKWARD,150);
delay(245); //上料第四次急停调整
motorRun(STOP,0);
servo_(129,65,108,162,91,70); //上料区第四次扫码1
delay(300);
q=162;
while(r==0)
{
scanflag == ' ';
scanflag = scan();
Serial.println("scan");
delay(200);
if(scanflag != ' ')
{
r=r+1;
}
q=q-1;
servo_(129,65,108,q,91,70);
}
judgment1();
servo_(129,63,95,134,91,70); //上料区第四次扫码2
delay(300);
q=134;
while(r==1)
{
scanflag == ' ';
scanflag = scan();
Serial.println("scan");
delay(200);
if(scanflag != ' ')
{
r=r+1;
}
q=q-1;
servo_(129,63,95,q,91,70);
}
judgment2();
}
}
while(Flag_1 == 7) //上料第五次停止
{
if(e>=6)
{
Flag_1=8;
}
r=0;
motorRun(FORWARD,200);
data[5] = digitalRead(6);
if(data[5])
{
motorRun(BACKWARD,150);
delay(175); //上料第五次急停调整
motorRun(STOP,0);
servo_(129,65,108,162,91,70); //上料区第五次扫码1
delay(300);
q=162;
while(r==0)
{
scanflag == ' ';
scanflag = scan();
Serial.println("scan");
delay(200);
if(scanflag != ' ')
{
r=r+1;
}
q=q-1;
servo_(129,65,108,q,91,70);
}
judgment1();
servo_(129,63,95,134,91,70); //上料区第五次扫码2
delay(300);
q=134;
while(r==1)
{
scanflag == ' ';
scanflag = scan();
Serial.println("scan");
delay(200);
if(scanflag != ' ')
{
r=r+1;
}
q=q-1;
servo_(129,63,95,q,91,70);
}
judgment2();
}
}
//**************************************栅格**************************************
while(Flag_1 == 8)
{
e=0;
tracing2();//执行:前面4个巡线
if(data[0] && data[1] && data[2] && data[3])
{
initial_b();
Flag_1=9;
Flag_2=1;
}
}
//**************************************栅格**************************************
/*
//**************************************减速带**********************************
while(Flag_1 == 8)
{
e=0;
tracing2();//执行:前面4个巡线
if(data[0] && data[1] && data[2] && data[3])
{
initial_b();
Flag_1=9;
}
}
while(Flag_1 == 9) //减速带
{
tracing2();//执行:前面4个巡线
data[5] = digitalRead(6);
if(data[5])
{
Flag_1=10;
}
}
while(Flag_1 == 10)
{
tracing2();
data[4] = digitalRead(7);
if(data[4])
{
motorRun(FORWARD,200);
delay(1000);
Flag_1=11;
Flag_2=1;
}
}
//**************************************减速带**********************************
*/
while(Flag_2 == 1)
{
tracing2();
if(data[0]&&data[1]&&!data[3])
{
Flag_2 = 2;
}
}
while(Flag_2 == 2) //下料第一次停止
{
r=0;
motorRun(BACKWARD,150);
delay(255); //下料第一次急停调整
motorRun(STOP,0);
servo_(128,106,50,124,91,65); //下料区第一次扫码1 down
q=124;
while(mySerial.read() >= 0){}
while(r==0)
{
scanflag == ' ';
scanflag = scan();
Serial.println("scan");
delay(300);
if(scanflag != ' ')
{
r=r+1;
}
q=q-1;
servo_(128,106,50,q,91,65);
}
judgment3();
servo_(128,97,82,132,91,65); //下料区第一次扫码2 up
delay(1000);
q=132;
while(r==1)
{
scanflag == ' ';
scanflag = scan();
Serial.println("scan");
delay(200);
if(scanflag != ' ')
{
r=r+1;
}
q=q-1;
servo_(128,97,82,q,91,65);
}
judgment4();
}
while( Flag_2 == 3) //下料第二次停止
{
r=0;
motorRun(FORWARD,200);//直行
data[4] = digitalRead(7);
if(data[4] )
{
motorRun(BACKWARD,150);
delay(150); //下料第二次急停调整
motorRun(STOP,0);
servo_(128,106,50,124,91,65); //下料区第二次扫码1 down
q=124;
while(r==0)
{
scanflag == ' ';
scanflag = scan();
Serial.println("scan");
delay(200);
if(scanflag != ' ')
{
r=r+1;
}
q=q-1;
servo_(128,106,50,q,91,65);
}
judgment3();
servo_(128,97,82,132,91,65); //下料区第二次扫码2 up
delay(1000);
q=132;
while(r==1)
{
scanflag == ' ';
scanflag = scan();
Serial.println("scan");
delay(200);
if(scanflag != ' ')
{
r=r+1;
}
q=q-1;
servo_(128,97,82,q,91,65);
}
judgment4();
}
}
while( Flag_2 == 4) //下料第三次停止
{
r=0;
motorRun(FORWARD,200);//直行
data[4] = digitalRead(7);
if(data[4] )
{
motorRun(BACKWARD,150);
delay(230); //下料第三次急停调整
motorRun(STOP,0);
servo_(128,106,50,124,91,65); //下料区第三次扫码1 down
q=124;
while(r==0)
{
scanflag == ' ';
scanflag = scan();
Serial.println("scan");
delay(200);
if(scanflag != ' ')
{
r=r+1;
}
q=q-1;
servo_(128,106,50,q,91,65);
}
judgment3();
servo_(128,97,82,132,91,65); //下料区第三次扫码2 up
delay(1000);
q=132;
while(r==1)
{
scanflag == ' ';
scanflag = scan();
Serial.println("scan");
delay(200);
if(scanflag != ' ')
{
r=r+1;
}
q=q-1;
servo_(128,97,82,q,91,65);
}
judgment4();
}
}
while(Flag_2 == 5) //下料第四次停止
{
if(e>=6)
{
Flag_1=7;
}
r=0;
motorRun(FORWARD,150);//直行
data[4] = digitalRead(7);
if(data[4] )
{
motorRun(BACKWARD,150);
delay(245); //下料第四次急停调整
motorRun(STOP,0);
servo_(128,106,50,124,91,65); //下料区第四次扫码1 down
q=124;
while(r==0)
{
scanflag == ' ';
scanflag = scan();
Serial.println("scan");
delay(200);
if(scanflag != ' ')
{
r=r+1;
}
q=q-1;
servo_(128,106,50,q,91,65);
}
judgment3();
servo_(128,97,82,132,91,65); //下料区第四次扫码2 up
delay(1000);
q=132;
while(r==1)
{
scanflag == ' ';
scanflag = scan();
Serial.println("scan");
delay(200);
if(scanflag != ' ')
{
r=r+1;
}
q=q-1;
servo_(128,97,82,q,91,65);
}
judgment4();
}
}
while(Flag_2 == 6) //下料第五次停止
{
if(e>=6)
{
Flag_1=7;
}
r=0;
motorRun(FORWARD,200);//直行
data[5] = digitalRead(6);
if(data[5] )
{
motorRun(BACKWARD,150);
delay(150); //下料第五次急停调整
motorRun(STOP,0);
servo_(128,106,50,124,91,65); //下料区第五次扫码1 down
q=124;
while(r==0)
{
scanflag == ' ';
scanflag = scan();
Serial.println("scan");
delay(200);
if(scanflag != ' ')
{
r=r+1;
}
q=q-1;
servo_(128,106,50,q,91,65);
}
judgment3();
servo_(128,97,82,132,91,65); //下料区第五次扫码2 up
delay(1000);
q=132;
while(r==1)
{
scanflag == ' ';
scanflag = scan();
Serial.println("scan");
delay(200);
if(scanflag != ' ')
{
r=r+1;
}
q=q-1;
servo_(128,97,82,q,91,65);
}
judgment4();
}
}
while(Flag_2 == 7)
{
tracing();
if(!data[0] && !data[1] && !data[2] && !data[3])
{
motorRun(FORWARD,200);
delay(300);
motorRun(STOP,0);
delay(5000);
}
}
}