北邮机器人队2020预备队培训(六) —— 传感器数据读取与处理
前言
这一节介绍如何读取两台机器人的传感器数据.
fetch机器人的摄像头数据
读取代码:
#!/usr/bin/env python
# BEGIN ALL
# coding=utf-8
import rospy, cv2, numpy
from sensor_msgs.msg import Image
import sys
import cv_bridge
class Catch:
def __init__(self):
self.bridge = cv_bridge.CvBridge()
self.image_sub = rospy.Subscriber('head_camera/rgb/image_raw',
Image, self.image_callback)
def image_callback(self, msg):
# BEGIN BRIDGE
image = self.bridge.imgmsg_to_cv2(msg,desired_encoding='bgr8')
cv2.imshow("window", image)
cv2.waitKey(3)
rospy.init_node('Catch')
catchbin = Catch()
rospy.spin()
# END ALL

灰度处理
gray = cv2.cvtColor(image,cv2.COLOR_RGB2GRAY)

二值化处理
ret, thresh1 = cv2.threshold(gray, 50, 255, cv2.THRESH_BINARY)
边缘提取
img1 = cv2.GaussianBlur(image, (3, 3), 0)
canny = cv2.Canny(img1, 50, 150)

HSV图
img_hsv = cv2.cvtColor(img,cv2.COLOR_BGR2HSV)

HSV图二值化

lower_blue = numpy.array([ 100, 43, 46])
upper_blue = numpy.array([124, 255, 255])
mask = cv2.inRange(img_hsv, lower_blue, upper_blue)

完整代码与效果
#!/usr/bin/env python
# BEGIN ALL
# coding=utf-8
import rospy, cv2, numpy
from sensor_msgs.msg import Image
import sys
import cv_bridge
class Catch:
def __init__(self):
self.bridge = cv_bridge.CvBridge()
self.image_sub = rospy.Subscriber('head_camera/rgb/image_raw',
Image, self.image_callback)
def image_callback(self, msg):
# BEGIN BRIDGE
image = self.bridge.imgmsg_to_cv2(msg,desired_encoding='bgr8')
gray = cv2.cvtColor(image,cv2.COLOR_RGB2GRAY)
ret, thresh1 = cv2.threshold(gray, 50, 255, cv2.THRESH_BINARY)
img1 = cv2.GaussianBlur(image, (3, 3), 0)
canny = cv2.Canny(img1, 50, 150)
img_hsv = cv2.cvtColor(image, cv2.COLOR_BGR2HSV)
lower_blue = numpy.array([ 100, 43, 46])
upper_blue = numpy.array([124, 255, 255])
mask = cv2.inRange(img_hsv, lower_blue, upper_blue)
cv2.imshow("gray",gray)
cv2.imshow("2",thresh1)
cv2.imshow("window", image)
cv2.imshow("canny",canny)
cv2.imshow("hsv", img_hsv)
cv2.imshow("mask", mask)
cv2.waitKey(3)
rospy.init_node('Catch')
catchbin = Catch()
rospy.spin()
# END ALL

racecar的激光雷达数据读取
#!/usr/bin/env python
# coding = utf-8
import rospy
from sensor_msgs.msg import LaserScan
def scan_callback(msg):
range_ahead = msg.ranges[len(msg.ranges)/2]
print "range ahead: %0.3f" % range_ahead
rospy.init_node('range_ahead')
scan_sub = rospy.Subscriber('/scan', LaserScan, scan_callback)
rospy.spin()

racecar陀螺仪数据读取
#!/usr/bin/env python
# license removed for brevity
import rospy
from sensor_msgs.msg import Imu
import math
def imu_cb(imu_data):
# Read the quaternion of the robot IMU
x = imu_data.orientation.x
y = imu_data.orientation.y
z = imu_data.orientation.z
w = imu_data.orientation.w
# Read the angular velocity of the robot IMU
w_x = imu_data.angular_velocity.x
w_y = imu_data.angular_velocity.y
w_z = imu_data.angular_velocity.z
# Read the linear acceleration of the robot IMU
a_x = imu_data.linear_acceleration.x
a_y = imu_data.linear_acceleration.y
a_z = imu_data.linear_acceleration.z
# Convert Quaternions to Euler-Angles
rpy_angle = [0, 0, 0]
rpy_angle[0] = math.atan2(2 * (w * x + y * z), 1 - 2 * (x**2 + y**2))
rpy_angle[1] = math.asin(2 * (w * y - z * x))
rpy_angle[2] = math.atan2(2 * (w * z + x * y), 1 - 2 * (y**2 + z**2))
print(rpy_angle)
return
if __name__ == '__main__':
rospy.init_node('imu_node', anonymous=True)
rospy.Subscriber("/racecar/imu_data", Imu, imu_cb)
rospy.spin()

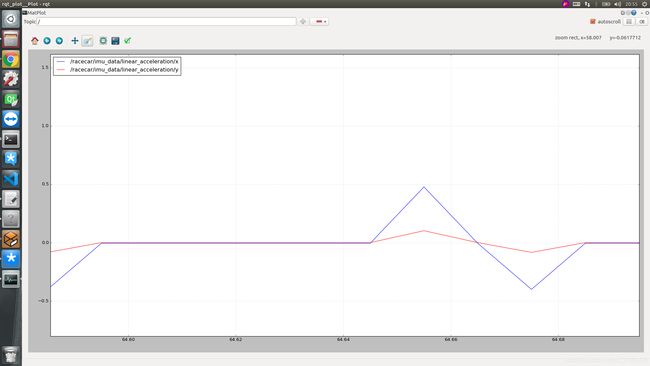
使用rqt_plot工具绘制
rqt_plot /racecar/imu_data/linear_acceleration
读取机器人位置
#!/usr/bin/env python
#coding=utf-8
import rospy
from gazebo_msgs.srv import *
import time
rospy.init_node('speed_control')
rospy.wait_for_service('/gazebo/get_model_state')
get_state_service = rospy.ServiceProxy('/gazebo/get_model_state', GetModelState)
model = GetModelStateRequest()
model.model_name = 'racecar'
objstate = get_state_service(model)
state = [objstate.pose.position.x, objstate.pose.position.y,objstate.pose.position.z]
print(state)

fetch机器人机械臂运动
#!/usr/bin/env python
import sys, rospy, tf, actionlib, moveit_commander
from control_msgs.msg import (GripperCommandAction, GripperCommandGoal)
from geometry_msgs.msg import *
from tf.transformations import quaternion_from_euler
from look_at_bin import look_at_bin
from std_srvs.srv import Empty
from moveit_msgs.msg import CollisionObject
from moveit_commander import PlanningSceneInterface
if __name__ == '__main__':
moveit_commander.roscpp_initialize(sys.argv)
rospy.init_node('pick_up_item')
rospy.wait_for_service("/clear_octomap")
clear_octomap = rospy.ServiceProxy("/clear_octomap",Empty)
gripper = actionlib.SimpleActionClient("gripper_controller/gripper_action",\
GripperCommandAction)
gripper.wait_for_server() # <1>
arm = moveit_commander.MoveGroupCommander("arm") # <2>
arm.allow_replanning(True)
tf_listener = tf.TransformListener() # <3>
rate = rospy.Rate(10)
gripper_goal = GripperCommandGoal() # <4>
gripper_goal.command.max_effort = 10.0
scene = PlanningSceneInterface("base_link")
p = Pose()
p.position.x = 0.4
p.position.y = -0.4
p.position.z = 0.7
p.orientation = Quaternion(*quaternion_from_euler(0, 1, 1))
arm.set_pose_target(p) # <5>
while True:
if arm.go(True):
break
clear_octomap()
look_at_bin()
while not rospy.is_shutdown():
rate.sleep()
print("back")
p.position.x = 0.4
p.position.y = -0.4
p.position.z = 0.7
p.orientation = Quaternion(*quaternion_from_euler(0, 1.2, 0))
arm.set_pose_target(p)
while True:
if arm.go(True):
break
clear_octomap()
rospy.sleep(1)
p.orientation = Quaternion(*quaternion_from_euler(0, -1.5, 0))
arm.set_pose_target(p)
while True:
if arm.go(True):
break
clear_octomap()
print("in")
p.position.x = 0.38
p.position.y = -0.25
p.position.z = 0.6
p.orientation = Quaternion(*quaternion_from_euler(0, -1.5, 0))
arm.set_pose_target(p)
while True:
if arm.go(True):
break
clear_octomap()
rospy.sleep(1)
break # <13>
打开racecar激光可视化
修改这个文件:~/robocon_ws/src/racecar_description/urdf/sensors/lidar.xacro
如图改成true

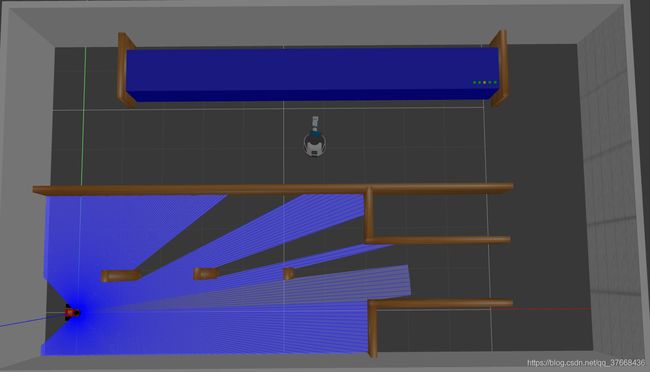
下图两个数可以修改激光的最大最小扫描角度,可以自行修改.

作业
- 学习opencv库,用一组图片制作一张你喜欢的图片的马赛克图,马赛克图实例:

基础版实现提示:
- 首先批处理用于马赛克的图片,使用opencv的resize函数将他们都归一化同样的马赛克大小
- 用这些批处理的马赛克图去遍历目标图,并替换目标图上相同大小的像素块
- 替换完成后使用addWeighted将原始图和替换后的图融合
进阶版实现提示:
- 修改那些提前准备的一堆图片的大小到马赛克般大小。
- 计算每一张图片的颜色均值。
- 修改目标图片的长宽,使之长宽都是马赛克大小的整数倍。
- 以马赛克大小为单位遍历目标图片同时计算这个区域的颜色均值 ,然后和提前准备的用于替换的马赛克图片的均值进行比较,用均值差最接近的替换目标图片。
- 用addWeighted函数对全替换好的图片和最开始准备的目标图片做一个融合,效果更加逼真。
可能用到的opencv函数:
imread:从磁盘读取图片
imwrite:向磁盘写入图片
imshow:显示图片
addWeighted:图片融合
waitKey:延时等待,用于显示图片
rect:创建矩形
copyTo:图片拷贝
cvtColor:图片格式转换函数,例如彩色图转灰度,转hsv等
meanStdDev:计算图片均值
resize:修改图片大小
相信这一个例子就能帮大家掌握opencv的使用了~
- 准备仿真比赛,体验今天的内容
作业提交
2020年8月6日23时59分,提交作业源码,截图效果,必要的文字说明等