QGC开发 显示双GPS/RTK信息以及自定义页面(ubuntu)
一、QGC开发 显示双GPS/RTK信息
1. 在sitl中进行仿真,虚拟出第二个GPS mavlink发送到地面站。
如下图中,在mavlink_msg_gps2_raw.h中找到发送第二组gps/rtk数据函数mavlink_msg_gps2_raw_send()发送,由于第一组已经有在发送,故只加入第二组。

发送代码如下:
mavlink_msg_gps2_raw_send (
chan,
last_fix_time_ms(0)*(uint64_t)1000,
status(0),
loc.lat, // in 1E7 degrees
loc.lng, // in 1E7 degrees
loc.alt * 10UL, // in mm
get_hdop(0),
get_vdop(0),
ground_speed(0)*100, // cm/s
ground_course(0)*100, // 1/100 degrees,
num_sats(0),
0, // TODO: Elipsoid height in mm
0);
2. 在QGC工程中加入解析第二个gps/rtl那包。
主要改了三个文件以及添加一个文件:分别为FirmwarePlugin.cc、Vehicle.cc、 Vehicle.h + GPS2Indicator.qml
在FirmwarePlugin.cc中如图中加入:
_toolBarIndicatorList.append(QVariant::fromValue(QUrl::fromUserInput("qrc:/toolbar/GPS2Indicator.qml")));

- 在
Vehicle.h中,首先加入一个class
class VehicleGPS2FactGroup : public FactGroup
{
Q_OBJECT
public:
VehicleGPS2FactGroup(QObject* parent = nullptr);
Q_PROPERTY(Fact* lat READ lat CONSTANT)
Q_PROPERTY(Fact* lon READ lon CONSTANT)
Q_PROPERTY(Fact* hdop READ hdop CONSTANT)
Q_PROPERTY(Fact* vdop READ vdop CONSTANT)
Q_PROPERTY(Fact* courseOverGround READ courseOverGround CONSTANT)
Q_PROPERTY(Fact* count READ count CONSTANT)
Q_PROPERTY(Fact* lock READ lock CONSTANT)
Fact* lat (void) { return &_latFact; }
Fact* lon (void) { return &_lonFact; }
Fact* hdop (void) { return &_hdopFact; }
Fact* vdop (void) { return &_vdopFact; }
Fact* courseOverGround (void) { return &_courseOverGroundFact; }
Fact* count (void) { return &_countFact; }
Fact* lock (void) { return &_lockFact; }
static const char* _latFactName;
static const char* _lonFactName;
static const char* _hdopFactName;
static const char* _vdopFactName;
static const char* _courseOverGroundFactName;
static const char* _countFactName;
static const char* _lockFactName;
private:
Fact _latFact;
Fact _lonFact;
Fact _hdopFact;
Fact _vdopFact;
Fact _courseOverGroundFact;
Fact _countFact;
Fact _lockFact;
};
- 再加入一些,声明:(由于改的部分比较零散,故用直接看git改的内容)

- 去
Vehicle.cc中加入mavlink解析函数:
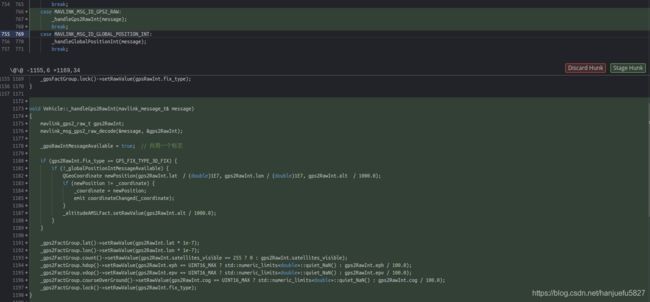
- 加入:


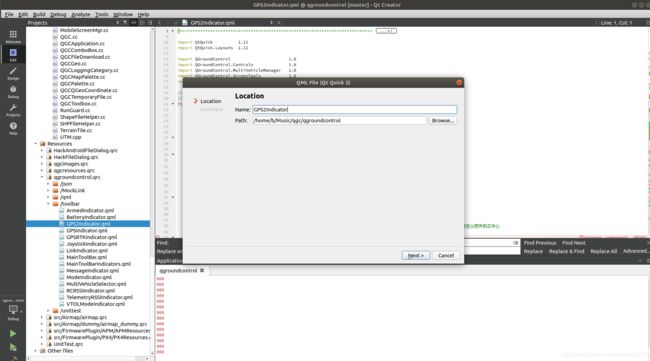
3. 最后新建一个qml文件
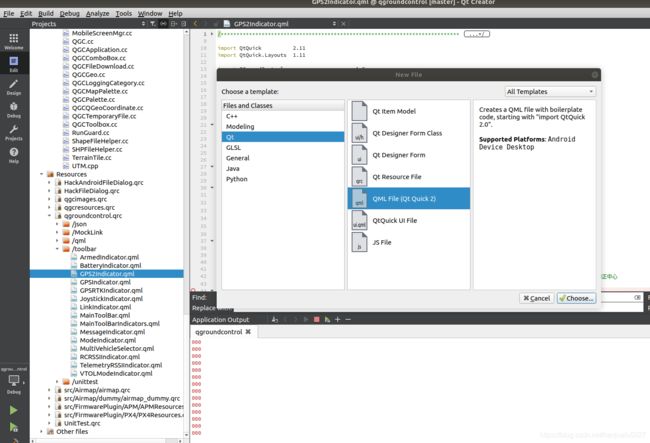
—>
 然后把下面的内容复制粘贴进去:
然后把下面的内容复制粘贴进去:
/****************************************************************************
*
* (c) 2009-2016 QGROUNDCONTROL PROJECT
*
* QGroundControl is licensed according to the terms in the file
* COPYING.md in the root of the source code directory.
*
****************************************************************************/
import QtQuick 2.11
import QtQuick.Layouts 1.11
import QGroundControl 1.0
import QGroundControl.Controls 1.0
import QGroundControl.MultiVehicleManager 1.0
import QGroundControl.ScreenTools 1.0
import QGroundControl.Palette 1.0
//-------------------------------------------------------------------------
//-- GPS Indicator
Item {
id: _root
width: (gps2ValuesColumn.x + gps2ValuesColumn.width) * 1.1
anchors.top: parent.top
anchors.bottom: parent.bottom
Component {
id: gps2Info
Rectangle {
width: gps2Col.width + ScreenTools.defaultFontPixelWidth * 3 //宽度
height: gps2Col.height + ScreenTools.defaultFontPixelHeight * 2 //高度
radius: ScreenTools.defaultFontPixelHeight * 0.5 //半径
color: qgcPal.window //颜色
border.color: qgcPal.text //加边框
Column {
id: gps2Col
spacing: ScreenTools.defaultFontPixelHeight * 0.5
width: Math.max(gps2Grid.width, gps2Label.width)
anchors.margins: ScreenTools.defaultFontPixelHeight
anchors.centerIn: parent // anchors.centerIn:parent,是将子控件放在父控件的正中心
QGCLabel {
id: gps2Label
text: (activeVehicle && activeVehicle.gps2.count.value >= 0) ? qsTr("GPS Status") : qsTr("GPS Data Unavailable")
font.family: ScreenTools.demiboldFontFamily // 字体
anchors.horizontalCenter: parent.horizontalCenter // 水平居中
}
GridLayout {
id: gps2Grid
visible: (activeVehicle && activeVehicle.gps2.count.value >= 0)
anchors.margins: ScreenTools.defaultFontPixelHeight
columnSpacing: ScreenTools.defaultFontPixelWidth
anchors.horizontalCenter: parent.horizontalCenter
columns: 2
QGCLabel { text: qsTr("GPS Count:") }
QGCLabel { text: activeVehicle ? activeVehicle.gps2.count.valueString : qsTr("N/A", "No data to display") }
QGCLabel { text: qsTr("GPS Lock:") }
QGCLabel { text: activeVehicle ? activeVehicle.gps2.lock.enumStringValue : qsTr("N/A", "No data to display") }
QGCLabel { text: qsTr("HDOP:") }
QGCLabel { text: activeVehicle ? activeVehicle.gps2.hdop.valueString : qsTr("--.--", "No data to display") }
QGCLabel { text: qsTr("VDOP:") }
QGCLabel { text: activeVehicle ? activeVehicle.gps2.vdop.valueString : qsTr("--.--", "No data to display") }
QGCLabel { text: qsTr("Course Over Ground:") }
QGCLabel { text: activeVehicle ? activeVehicle.gps2.courseOverGround.valueString : activeVehicle.gps2.courseOverGround.valueString }
}
}
}
}
QGCColoredImage {
id: gps2Icon
width: height
anchors.top: parent.top
anchors.bottom: parent.bottom
source: "/qmlimages/Gps.svg"
fillMode: Image.PreserveAspectFit
sourceSize.height: height
opacity: (activeVehicle && activeVehicle.gps2.count.value >= 0) ? 1 : 0.5
color: qgcPal.buttonText
}
Column {
id: gps2ValuesColumn
anchors.verticalCenter: parent.verticalCenter
anchors.leftMargin: ScreenTools.defaultFontPixelWidth / 2
anchors.left: gps2Icon.right
QGCLabel {
anchors.horizontalCenter: hdopValue.horizontalCenter
visible: activeVehicle && !isNaN(activeVehicle.gps2.hdop.value)
color: qgcPal.buttonText
text: activeVehicle ? activeVehicle.gps2.count.valueString : ""
}
QGCLabel {
id: hdopValue
visible: activeVehicle && !isNaN(activeVehicle.gps2.hdop.value)
color: qgcPal.buttonText
text: activeVehicle ? activeVehicle.gps2.hdop.value.toFixed(1) : ""
}
}
MouseArea {
anchors.fill: parent
onClicked: {
mainWindow.showPopUp(_root, gps2Info)
}
}
}
然后debug即可:
出现了两个GPS,由于在飞控中发下来的数据一模一样,所以存在两个一样,为了验证没问题,去飞控把下发的卫星数量改下。
把卫星改为40颗
mavlink_msg_gps2_raw_send (
chan,
last_fix_time_ms(0)*(uint64_t)1000,
status(0),
loc.lat, // in 1E7 degrees
loc.lng, // in 1E7 degrees
loc.alt * 10UL, // in mm
get_hdop(0),
get_vdop(0),
ground_speed(0)*100, // cm/s
ground_course(0)*100, // 1/100 degrees,
40,
0, // TODO: Elipsoid height in mm
0);
第二个卫星显示是40,故接收以及显示成功:

完成
二、自定义页面
用到的文件为:MainRootWindow.qml、MainToolBar.qml
效果如下图,功能可后续扩展:
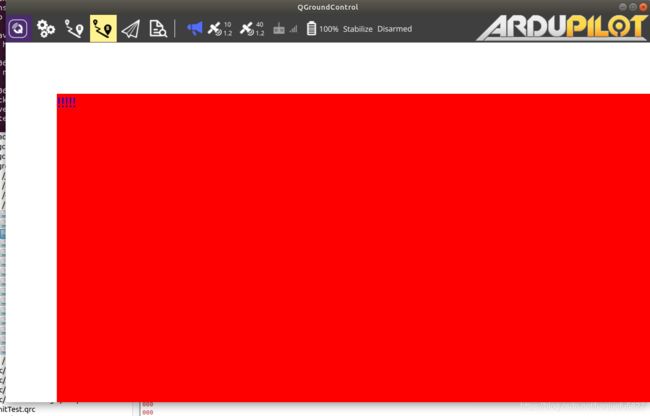
如下图,新建myadd.qml
import QtQuick 2.11
import QtQuick.Controls 2.4
import QtQuick.Layouts 1.11
import QtQuick.Dialogs 1.3
import QtQuick.Controls.Styles 1.4
import QtLocation 5.3
import QtPositioning 5.3
import QGroundControl 1.0
import QGroundControl.Controls 1.0
import QGroundControl.ScreenTools 1.0
import QGroundControl.Palette 1.0
import QGroundControl.FlightMap 1.0
import QGroundControl.QGCMapEngineManager 1.0
import QGroundControl.FactSystem 1.0
import QGroundControl.FactControls 1.0
Rectangle{
id: myRect
color: "red"
visible: true
x: 100
y: 100
width: 100
height: 100
Text {
id: myTest
text: qsTr("!!!!!")
color: "blue"
font.pointSize: 20
}
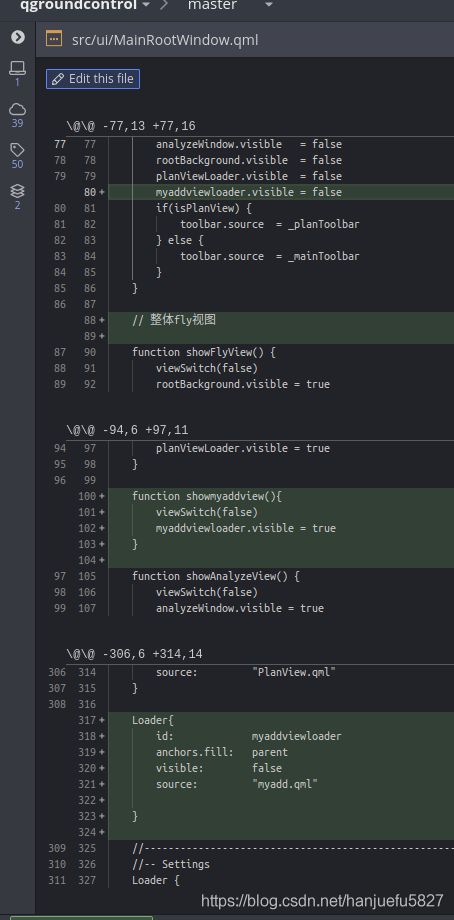
在MainRootWindow.qml中加入内容如下图:
在MainToolBar.qml中加入
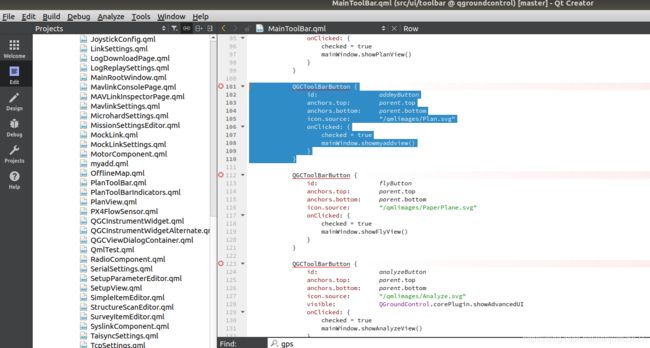
QGCToolBarButton {
id: addmyButton
anchors.top: parent.top
anchors.bottom: parent.bottom
icon.source: "/qmlimages/Plan.svg"
onClicked: {
checked = true
mainWindow.showmyaddview()
}
}
编译后完成